Space Groups and Lattice Complexes ; —
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Final Poster
Associating Finite Groups with Dessins d’Enfants Luis Baeza, Edwin Baeza, Conner Lawrence, and Chenkai Wang Abstract Platonic Solids Rotation Group Dn: Regular Convex Polygon Approach Each finite, connected planar graph has an automorphism group G;such Following Magot and Zvonkin, reduce to easier cases using “hypermaps” permutations can be extended to automorphisms of the Riemann sphere φ : P1(C) P1(C), then composing β = φ f where S 2(R) P1(C). In 1984, Alexander Grothendieck, inspired by a result of f : 1( ) ! 1( )isaBely˘ımapasafunctionofeither◦ zn or ' P C P C Gennadi˘ıBely˘ıfrom 1979, constructed a finite, connected planar graph 4 zn/(zn +1)! 2 such that Aut(f ) Z or Aut(f ) D ,respectively. ' n ' n ∆β via certain rational functions β(z)=p(z)/q(z)bylookingatthe inverse image of the interval from 0 to 1. The automorphisms of such a Hypermaps: Rotation Group Zn graph can be identified with the Galois group Aut(β)oftheassociated 1 1 rational function β : P (C) P (C). In this project, we investigate how Rigid Rotations of the Platonic Solids I Wheel/Pyramids (J1, J2) ! w 3 (w +8) restrictive Grothendieck’s concept of a Dessin d’Enfant is in generating all n 2 I φ(w)= 1 1 z +1 64 (w 1) automorphisms of planar graphs. We discuss the rigid rotations of the We have an action : PSL2(C) P (C) P (C). β(z)= : v = n + n, e =2 n, f =2 − n ◦ ⇥ 2 !n 2 4 zn · Platonic solids (the tetrahedron, cube, octahedron, icosahedron, and I Zn = r r =1 and Dn = r, s s = r =(sr) =1 are the rigid I Cupola (J3, J4, J5) dodecahedron), the Archimedean solids, the Catalan solids, and the rotations of the regular convex polygons,with 4w 4(w 2 20w +105)3 I φ(w)= − ⌦ ↵ ⌦ 1 ↵ Rotation Group A4: Tetrahedron 3 2 Johnson solids via explicit Bely˘ımaps. -

The Conway Space-Filling
Symmetry: Art and Science Buenos Aires Congress, 2007 THE CONWAY SPACE-FILLING MICHAEL LONGUET-HIGGINS Name: Michael S. Longuet-Higgins, Mathematician and Oceanographer, (b. Lenham, England, 1925). Address: Institute for Nonlinear Science, University of California San Diego, 9500 Gilman Drive, La Jolla, CA 92037-0402, U.S.A. Email: [email protected] Fields of interest: Fluid dynamics, ocean waves and currents, geophysics, underwater sound, projective geometry, polyhedra, mathematical toys. Awards: Rayleigh Prize for Mathematics, Cambridge University, 1950; Hon.D. Tech., Technical University of Denmark, 1979; Hon. LL.D., University of Glasgow, Scotland, 1979; Fellow of the American Geophysical Union, 1981; Sverdrup Gold Medal of the American Meteorological Society, 1983; International Coastal Engineering Award of the American Society of Civil Engineers, 1984; Oceanography Award of the Society for Underwater Technology, 1990; Honorary Fellow of the Acoustical Society of America, 2002. Publications: “Uniform polyhedra” (with H.S.M. Coxeter and J.C.P. Miller (1954). Phil. Trans. R. Soc. Lond. A 246, 401-450. “Some Mathematical Toys” (film), (1963). British Association Meeting, Aberdeen, Scotland; “Clifford’s chain and its analogues, in relation to the higher polytopes,” (1972). Proc. R. Soc. Lond. A 330, 443-466. “Inversive properties of the plane n-line, and a symmetric figure of 2x5 points on a quadric,” (1976). J. Lond. Math. Soc. 12, 206-212; Part II (with C.F. Parry) (1979) J. Lond. Math. Soc. 19, 541-560; “Nested triacontahedral shells, or How to grow a quasi-crystal,” (2003) Math. Intelligencer 25, 25-43. Abstract: A remarkable new space-filling, with an unusual symmetry, was recently discovered by John H. -

Computational Design Framework 3D Graphic Statics
Computational Design Framework for 3D Graphic Statics 3D Graphic for Computational Design Framework Computational Design Framework for 3D Graphic Statics Juney Lee Juney Lee Juney ETH Zurich • PhD Dissertation No. 25526 Diss. ETH No. 25526 DOI: 10.3929/ethz-b-000331210 Computational Design Framework for 3D Graphic Statics A thesis submitted to attain the degree of Doctor of Sciences of ETH Zurich (Dr. sc. ETH Zurich) presented by Juney Lee 2015 ITA Architecture & Technology Fellow Supervisor Prof. Dr. Philippe Block Technical supervisor Dr. Tom Van Mele Co-advisors Hon. D.Sc. William F. Baker Prof. Allan McRobie PhD defended on October 10th, 2018 Degree confirmed at the Department Conference on December 5th, 2018 Printed in June, 2019 For my parents who made me, for Dahmi who raised me, and for Seung-Jin who completed me. Acknowledgements I am forever indebted to the Block Research Group, which is truly greater than the sum of its diverse and talented individuals. The camaraderie, respect and support that every member of the group has for one another were paramount to the completion of this dissertation. I sincerely thank the current and former members of the group who accompanied me through this journey from close and afar. I will cherish the friendships I have made within the group for the rest of my life. I am tremendously thankful to the two leaders of the Block Research Group, Prof. Dr. Philippe Block and Dr. Tom Van Mele. This dissertation would not have been possible without my advisor Prof. Block and his relentless enthusiasm, creative vision and inspiring mentorship. -
Glide and Screw
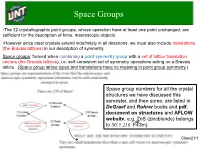
Space Groups •The 32 crystallographic point groups, whose operation have at least one point unchanged, are sufficient for the description of finite, macroscopic objects. •However since ideal crystals extend indefinitely in all directions, we must also include translations (the Bravais lattices) in our description of symmetry. Space groups: formed when combining a point symmetry group with a set of lattice translation vectors (the Bravais lattices), i.e. self-consistent set of symmetry operations acting on a Bravais lattice. (Space group lattice types and translations have no meaning in point group symmetry.) Space group numbers for all the crystal structures we have discussed this semester, and then some, are listed in DeGraef and Rohrer books and pdf. document on structures and AFLOW website, e.g. ZnS (zincblende) belongs to SG # 216: F43m) Class21/1 Screw Axes •The combination of point group symmetries and translations also leads to two additional operators known as glide and screw. •The screw operation is a combination of a rotation and a translation parallel to the rotation axis. •As for simple rotations, only diad, triad, tetrad and hexad axes, that are consistent with Bravais lattice translation vectors can be used for a screw operator. •In addition, the translation on each rotation must be a rational fraction of the entire translation. •There is no combination of rotations or translations that can transform the pattern produced by 31 to the pattern of 32 , and 41 to the pattern of 43, etc. •Thus, the screw operation results in handedness Class21/2 or chirality (can’t superimpose image on another, e.g., mirror image) to the pattern. -

A Parallelepiped Based Approach
3D Modelling Using Geometric Constraints: A Parallelepiped Based Approach Marta Wilczkowiak, Edmond Boyer, and Peter Sturm MOVI–GRAVIR–INRIA Rhˆone-Alpes, 38330 Montbonnot, France, [email protected], http://www.inrialpes.fr/movi/people/Surname Abstract. In this paper, efficient and generic tools for calibration and 3D reconstruction are presented. These tools exploit geometric con- straints frequently present in man-made environments and allow cam- era calibration as well as scene structure to be estimated with a small amount of user interactions and little a priori knowledge. The proposed approach is based on primitives that naturally characterize rigidity con- straints: parallelepipeds. It has been shown previously that the intrinsic metric characteristics of a parallelepiped are dual to the intrinsic charac- teristics of a perspective camera. Here, we generalize this idea by taking into account additional redundancies between multiple images of multiple parallelepipeds. We propose a method for the estimation of camera and scene parameters that bears strongsimilarities with some self-calibration approaches. Takinginto account prior knowledgeon scene primitives or cameras, leads to simpler equations than for standard self-calibration, and is expected to improve results, as well as to allow structure and mo- tion recovery in situations that are otherwise under-constrained. These principles are illustrated by experimental calibration results and several reconstructions from uncalibrated images. 1 Introduction This paper is about using partial information on camera parameters and scene structure, to simplify and enhance structure from motion and (self-) calibration. We are especially interested in reconstructing man-made environments for which constraints on the scene structure are usually easy to provide. -

Area, Volume and Surface Area
The Improving Mathematics Education in Schools (TIMES) Project MEASUREMENT AND GEOMETRY Module 11 AREA, VOLUME AND SURFACE AREA A guide for teachers - Years 8–10 June 2011 YEARS 810 Area, Volume and Surface Area (Measurement and Geometry: Module 11) For teachers of Primary and Secondary Mathematics 510 Cover design, Layout design and Typesetting by Claire Ho The Improving Mathematics Education in Schools (TIMES) Project 2009‑2011 was funded by the Australian Government Department of Education, Employment and Workplace Relations. The views expressed here are those of the author and do not necessarily represent the views of the Australian Government Department of Education, Employment and Workplace Relations. © The University of Melbourne on behalf of the international Centre of Excellence for Education in Mathematics (ICE‑EM), the education division of the Australian Mathematical Sciences Institute (AMSI), 2010 (except where otherwise indicated). This work is licensed under the Creative Commons Attribution‑NonCommercial‑NoDerivs 3.0 Unported License. http://creativecommons.org/licenses/by‑nc‑nd/3.0/ The Improving Mathematics Education in Schools (TIMES) Project MEASUREMENT AND GEOMETRY Module 11 AREA, VOLUME AND SURFACE AREA A guide for teachers - Years 8–10 June 2011 Peter Brown Michael Evans David Hunt Janine McIntosh Bill Pender Jacqui Ramagge YEARS 810 {4} A guide for teachers AREA, VOLUME AND SURFACE AREA ASSUMED KNOWLEDGE • Knowledge of the areas of rectangles, triangles, circles and composite figures. • The definitions of a parallelogram and a rhombus. • Familiarity with the basic properties of parallel lines. • Familiarity with the volume of a rectangular prism. • Basic knowledge of congruence and similarity. • Since some formulas will be involved, the students will need some experience with substitution and also with the distributive law. -

C:\Documents and Settings\Alan Smithee\My Documents\MOTM
I`mt`qx1/00Lhmdq`knesgdLnmsg9Rbnkdbhsd This month’s mineral, scolecite, is an uncommon zeolite from India. Our write-up explains its origin as a secondary mineral in volcanic host rocks, the difficulty of collecting this fragile mineral, the unusual properties of the zeolite-group minerals, and why mineralogists recently revised the system of zeolite classification and nomenclature. OVERVIEW PHYSICAL PROPERTIES Chemistry: Ca(Al2Si3O10)A3H2O Hydrous Calcium Aluminum Silicate (Hydrous Calcium Aluminosilicate), usually containing some potassium and sodium. Class: Silicates Subclass: Tectosilicates Group: Zeolites Crystal System: Monoclinic Crystal Habits: Usually as radiating sprays or clusters of thin, acicular crystals or Hairlike fibers; crystals are often flattened with tetragonal cross sections, lengthwise striations, and slanted terminations; also massive and fibrous. Twinning common. Color: Usually colorless, white, gray; rarely brown, pink, or yellow. Luster: Vitreous to silky Transparency: Transparent to translucent Streak: White Cleavage: Perfect in one direction Fracture: Uneven, brittle Hardness: 5.0-5.5 Specific Gravity: 2.16-2.40 (average 2.25) Figure 1. Scolecite. Luminescence: Often fluoresces yellow or brown in ultraviolet light. Refractive Index: 1.507-1.521 Distinctive Features and Tests: Best field-identification marks are acicular crystal habit; vitreous-to-silky luster; very low density; and association with other zeolite-group minerals, especially the closely- related minerals natrolite [Na2(Al2Si3O10)A2H2O] and mesolite [Na2Ca2(Al6Si9O30)A8H2O]. Laboratory tests are often needed to distinguish scolecite from other zeolite minerals. Dana Classification Number: 77.1.5.5 NAME The name “scolecite,” pronounced SKO-leh-site, is derived from the German Skolezit, which comes from the Greek sklx, meaning “worm,” an allusion to the tendency of its acicular crystals to curl when heated and dehydrated. -

Types of Lattices
Types of Lattices Types of Lattices Lattices are either: 1. Primitive (or Simple): one lattice point per unit cell. 2. Non-primitive, (or Multiple) e.g. double, triple, etc.: more than one lattice point per unit cell. Double r2 cell r1 r2 Triple r1 cell r2 r1 Primitive cell N + e 4 Ne = number of lattice points on cell edges (shared by 4 cells) •When repeated by successive translations e =edge reproduce periodic pattern. •Multiple cells are usually selected to make obvious the higher symmetry (usually rotational symmetry) that is possessed by the 1 lattice, which may not be immediately evident from primitive cell. Lattice Points- Review 2 Arrangement of Lattice Points 3 Arrangement of Lattice Points (continued) •These are known as the basis vectors, which we will come back to. •These are not translation vectors (R) since they have non- integer values. The complexity of the system depends upon the symmetry requirements (is it lost or maintained?) by applying the symmetry operations (rotation, reflection, inversion and translation). 4 The Five 2-D Bravais Lattices •From the previous definitions of the four 2-D and seven 3-D crystal systems, we know that there are four and seven primitive unit cells (with 1 lattice point/unit cell), respectively. •We can then ask: can we add additional lattice points to the primitive lattices (or nets), in such a way that we still have a lattice (net) belonging to the same crystal system (with symmetry requirements)? •First illustrate this for 2-D nets, where we know that the surroundings of each lattice point must be identical. -
Group Theory Applied to Crystallography
International Union of Crystallography Commission on Mathematical and Theoretical Crystallography Summer School on Mathematical and Theoretical Crystallography 27 April - 2 May 2008, Gargnano, Italy Group theory applied to crystallography Bernd Souvignier Institute for Mathematics, Astrophysics and Particle Physics Radboud University Nijmegen The Netherlands 29 April 2008 2 CONTENTS Contents 1 Introduction 3 2 Elements of space groups 5 2.1 Linearmappings .................................. 5 2.2 Affinemappings................................... 8 2.3 AffinegroupandEuclideangroup . .... 9 2.4 Matrixnotation .................................. 12 3 Analysis of space groups 14 3.1 Lattices ....................................... 14 3.2 Pointgroups..................................... 17 3.3 Transformationtoalatticebasis . ....... 19 3.4 Systemsofnonprimitivetranslations . ......... 22 4 Construction of space groups 25 4.1 Shiftoforigin................................... 25 4.2 Determining systems of nonprimitivetranslations . ............. 27 4.3 Normalizeraction................................ .. 31 5 Space group classification 35 5.1 Spacegrouptypes................................. 35 5.2 Arithmeticclasses............................... ... 36 5.3 Bravaisflocks.................................... 37 5.4 Geometricclasses................................ .. 39 5.5 Latticesystems .................................. 41 5.6 Crystalsystems .................................. 41 5.7 Crystalfamilies ................................. .. 42 6 Site-symmetry -

Space Symmetry, Space Groups
Space symmetry, Space groups - Space groups are the product of possible combinations of symmetry operations including translations. - There exist 230 different space groups in 3-dimensional space - Comparing to point groups, space groups have 2 more symmetry operations (table 1). These operations include translations. Therefore they describe not only the lattice but also the crystal structure. Table 1: Additional symmetry operations in space symmetry, their description, symmetry elements and Hermann-Mauguin symbols. symmetry H-M description symmetry element operation symbol screw 1. rotation by 360°/N screw axis NM (Schraubung) 2. translation along the axis (Schraubenachse) 1. reflection across the plane glide glide plane 2. translation parallel to the a,b,c,n,d (Gleitspiegelung) (Gleitspiegelebene) glide plane Glide directions for the different gilde planes: a (b,c): translation along ½ a or ½ b or ½ c, respectively) (with ,, cba = vectors of the unit cell) n: translation e.g. along ½ (a + b) d: translation e.g. along ¼ (a + b), d from diamond, because this glide plane occurs in the diamond structure Screw axis example: 21 (N = 2, M = 1) 1) rotation by 180° (= 360°/2) 2) translation parallel to the axis by ½ unit (M/N) Only 21, (31, 32), (41, 43), 42, (61, 65) (62, 64), 63 screw axes exist in parenthesis: right, left hand screw axis Space group symbol: The space group symbol begins with a capital letter (P: primitive; A, B, C: base centred I, body centred R rhombohedral, F face centred), which represents the Bravais lattice type, followed by the short form of symmetry elements, as known from the point group symbols. -
Unit 6 Visualising Solid Shapes(Final)
• 3D shapes/objects are those which do not lie completely in a plane. • 3D objects have different views from different positions. • A solid is a polyhedron if it is made up of only polygonal faces, the faces meet at edges which are line segments and the edges meet at a point called vertex. • Euler’s formula for any polyhedron is, F + V – E = 2 Where F stands for number of faces, V for number of vertices and E for number of edges. • Types of polyhedrons: (a) Convex polyhedron A convex polyhedron is one in which all faces make it convex. e.g. (1) (2) (3) (4) 12/04/18 (1) and (2) are convex polyhedrons whereas (3) and (4) are non convex polyhedron. (b) Regular polyhedra or platonic solids: A polyhedron is regular if its faces are congruent regular polygons and the same number of faces meet at each vertex. For example, a cube is a platonic solid because all six of its faces are congruent squares. There are five such solids– tetrahedron, cube, octahedron, dodecahedron and icosahedron. e.g. • A prism is a polyhedron whose bottom and top faces (known as bases) are congruent polygons and faces known as lateral faces are parallelograms (when the side faces are rectangles, the shape is known as right prism). • A pyramid is a polyhedron whose base is a polygon and lateral faces are triangles. • A map depicts the location of a particular object/place in relation to other objects/places. The front, top and side of a figure are shown. Use centimetre cubes to build the figure. -

Uniform Panoploid Tetracombs
Uniform Panoploid Tetracombs George Olshevsky TETRACOMB is a four-dimensional tessellation. In any tessellation, the honeycells, which are the n-dimensional polytopes that tessellate the space, Amust by definition adjoin precisely along their facets, that is, their ( n!1)- dimensional elements, so that each facet belongs to exactly two honeycells. In the case of tetracombs, the honeycells are four-dimensional polytopes, or polychora, and their facets are polyhedra. For a tessellation to be uniform, the honeycells must all be uniform polytopes, and the vertices must be transitive on the symmetry group of the tessellation. Loosely speaking, therefore, the vertices must be “surrounded all alike” by the honeycells that meet there. If a tessellation is such that every point of its space not on a boundary between honeycells lies in the interior of exactly one honeycell, then it is panoploid. If one or more points of the space not on a boundary between honeycells lie inside more than one honeycell, the tessellation is polyploid. Tessellations may also be constructed that have “holes,” that is, regions that lie inside none of the honeycells; such tessellations are called holeycombs. It is possible for a polyploid tessellation to also be a holeycomb, but not for a panoploid tessellation, which must fill the entire space exactly once. Polyploid tessellations are also called starcombs or star-tessellations. Holeycombs usually arise when (n!1)-dimensional tessellations are themselves permitted to be honeycells; these take up the otherwise free facets that bound the “holes,” so that all the facets continue to belong to two honeycells. In this essay, as per its title, we are concerned with just the uniform panoploid tetracombs.