Extensible Hardware Architecture for Mobile Robots
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Television Academy Awards
2019 Primetime Emmy® Awards Ballot Outstanding Comedy Series A.P. Bio Abby's After Life American Housewife American Vandal Arrested Development Atypical Ballers Barry Better Things The Big Bang Theory The Bisexual Black Monday black-ish Bless This Mess Boomerang Broad City Brockmire Brooklyn Nine-Nine Camping Casual Catastrophe Champaign ILL Cobra Kai The Conners The Cool Kids Corporate Crashing Crazy Ex-Girlfriend Dead To Me Detroiters Easy Fam Fleabag Forever Fresh Off The Boat Friends From College Future Man Get Shorty GLOW The Goldbergs The Good Place Grace And Frankie grown-ish The Guest Book Happy! High Maintenance Huge In France I’m Sorry Insatiable Insecure It's Always Sunny in Philadelphia Jane The Virgin Kidding The Kids Are Alright The Kominsky Method Last Man Standing The Last O.G. Life In Pieces Loudermilk Lunatics Man With A Plan The Marvelous Mrs. Maisel Modern Family Mom Mr Inbetween Murphy Brown The Neighborhood No Activity Now Apocalypse On My Block One Day At A Time The Other Two PEN15 Queen America Ramy The Ranch Rel Russian Doll Sally4Ever Santa Clarita Diet Schitt's Creek Schooled Shameless She's Gotta Have It Shrill Sideswiped Single Parents SMILF Speechless Splitting Up Together Stan Against Evil Superstore Tacoma FD The Tick Trial & Error Turn Up Charlie Unbreakable Kimmy Schmidt Veep Vida Wayne Weird City What We Do in the Shadows Will & Grace You Me Her You're the Worst Young Sheldon Younger End of Category Outstanding Drama Series The Affair All American American Gods American Horror Story: Apocalypse American Soul Arrow Berlin Station Better Call Saul Billions Black Lightning Black Summer The Blacklist Blindspot Blue Bloods Bodyguard The Bold Type Bosch Bull Chambers Charmed The Chi Chicago Fire Chicago Med Chicago P.D. -
Battlebots Newsletter: Preparing for Competition March, 2021 As the Newest Design Team, Battlebots Has Never Competed Before
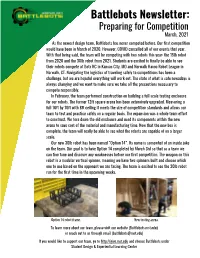
Battlebots Newsletter: Preparing for Competition March, 2021 As the newest design team, Battlebots has never competed before. Our first competition would have been in March of 2020. However, COVID cancelled all of our events that year. With that being said, the team will be competing with two robots this year: the 15lb robot from 2020 and the 30lb robot from 2021. Students are excited to finally be able to see their robots compete at Bots KC in Kansas City, MO and Norwalk Havoc Robot League in Norwalk, CT. Navigating the logistics of traveling safely to competitions has been a challenge, but we are hopeful everything will work out. The state of what is safe nowadays is always changing and we want to make sure we take all the precautions necessary to compete responsibly. In February, the team performed construction on building a full scale testing enclosure for our robots. The former 12ft square arena has been extensively upgraded. Measuring a full 16ft by 16ft with 8ft ceiling it meets the size of competition standards and allows our team to test and practice safely on a regular basis. The expansion was a whole team effort to construct. We tore down the old enclosure and used its components within the new arena to save cost of the material and manufacturing time. Now that the new box is complete, the team will really be able to see what the robots are capable of on a larger scale. Our new 30lb robot has been named “Option 14”. Its name is somewhat of an inside joke on the team. -

Who Makes Trends? Understanding Demographic Biases In
Who Makes Trends? Understanding Demographic Biases in Crowdsourced Recommendations Abhijnan Chakraborty∗#, Johnnatan Messiaso#, Fabricio Benevenutoo, Saptarshi Ghosh∗, Niloy Ganguly∗, Krishna P. Gummadi# #Max Planck Institute for Software Systems, Germany ∗Indian Institute of Technology Kharagpur, India oUniversidade Federal de Minas Gerais, Brazil Abstract A large number of prior works on trending topics have fo- what Users of social media sites like Facebook and Twitter rely on cused on the trends are (e.g., classifying the trends into crowdsourced content recommendation systems (e.g., Trend- different categories (Naaman, Becker, and Gravano 2011)), ing Topics) to retrieve important and useful information. Con- or how the trends are selected (e.g., proposing new algo- tents selected for recommendation indirectly give the ini- rithms to identify trends from the content stream (Benhardus tial users who promoted (by liking or posting) the con- and Kalita 2013)). Complementary to the earlier works, our tent an opportunity to propagate their messages to a wider focus in this paper is on the users who make different topics audience. Hence, it is important to understand the demo- worthy of being recommended as trending. Specifically, we graphics of people who make a content worthy of recom- attempt to analyze the demographics of crowds promoting mendation, and explore whether they are representative of different topics on the social media sites. By promoters of the media site’s overall population. In this work, using ex- a topic, we refer to the users who posted on the topic be- tensive data collected from Twitter, we make the first at- fore tempt to quantify and explore the demographic biases in it became trending, thereby contributing to the topic’s the crowdsourced recommendations. -

2020 UC MET Battlebot Team
2020 UC MET Battlebot Team 15lb Bot Senior Design II Report Senior Design Proposal submitted to the Department of Mechanical and Materials Engineering College of Engineering and Applied Science University of Cincinnati in partial fulfillment of the requirements for the degree of Bachelor of Science in Mechanical Engineering Technology by Fred Schroeder Isabella Long Mathew Itapson December 2019 Thesis Advisor: Dr. Janet Dong 15lb Bot SD II Report Fred Schroeder, Isabella Long, Mathew Itapson TABLE OF CONTENTS TABLE OF CONTENTS ....................................................................................................... 1 LIST OF FIGURES ................................................................................................................ 2 LIST OF TABLES .................................................................................................................. 3 ABSTRACT ............................................................................................................................. 4 PROBLEM DEFINITION AND RESEARCH .................................................................... 4 PROBLEM STATEMENT ...................................................................................................................................... 4 BACKGROUND .................................................................................................................................................... 4 RESEARCH ........................................................................................................................... -

Manatee Libraries October 2018 Events
Downtown South Manatee Sat Braden River Mon 01 Area 52 SciClub (ages 8-12): Zany Zoetropes 3:00 p.m. - 5:00 p.m. Tu e 02 Forty Carrots: Partners in Play1 12:30 p.m. - 1:30 p.m. Wed 03 Preschool Storytime 10:15 a.m. - 11:00 a.m. Tu e 02 Forty Carrots: Partners in Play1 10:15 a.m. - 11:15 a.m. Kids Krew: Candy Science 3:30 p.m. - 4:30 p.m. Thurs 04 Tree Tops Storytime 12:30 p.m. - 1:00 p.m. Wed 03 Library Apps (eBooks/eAudio, Movies, TV & Music 2:00 p.m. - 3:30 p.m. Latin Cooking Demo With Dr. Capó (Food Pharmacy) 6:00 p.m. - 7:00 p.m. Fri 05 Forty Carrots: Partners at Play (Session 1)1 10:00 a.m. - 11:00 a.m. Thurs 04 Preschool Storytime 10:00 a.m. - 10:30 a.m. Tech Tutors (by appointment only) 5:00 p.m. - 7:00 p.m. Forty Carrots: Partners at Play (Session 2)1 11:30 a.m. - 12:30 p.m. Mother Goose on the Loose 10:30 a.m. - 11:00 a.m. Wed 03 Preschool STEM Storytime: Bugs 10:00 a.m. - 11:00 a.m. Sat 06 Lego Family Fun 11:00 a.m. - 12:30 p.m. Early Literacy 11:00 a.m. - 11:30 a.m. Drop in DIY (ages 18+) Recycled Book Jewelry 1:30 p.m. - 3:30 p.m. Teen Advisory Board (TAB) 3:00 p.m. - 5:00 p.m. -

Extensible Hardware Architecture for Mobile Robots
Extensible Hardware Architecture for Mobile Robots Eric Park∗, Linda Kobayashi, and Susan Y. Lee∗ Intelligent Robotics Group NASA Ames Research Center Moffett Field, CA 94035-1000, USA {epark, lkobayashi, sylee}@arc.nasa.gov Abstract— The Intelligent Robotics Group at NASA Ames Research Center has developed a new mobile robot hardware architecture designed for extensibility and reconfigurability. Currently implemented on the K9 rover, and soon to be integrated onto the K10 series of human-robot collaboration research robots, this achitecture allows for rapid changes in instrumentation configuration and provides a high degree of modularity through a synergistic mix of off-the-shelf and custom designed components, allowing eased transplantation into a wide variety of mobile robot platforms. A component level overview of this architecture is presented along with a description of the changes required for implementation on K10, followed by plans for future work. Index Terms— modular, extensible, hardware architecture, mobile robot, k9 INTRODUCTION Fig. 1. K9 rover Mobile robots used for research and development are in increasing demand as the application space for robotics K9 Overview widens. With this demand comes the need for a smarter way to produce reliable mobile robots with a proven set The K9 rover is a 6-wheel steer, 6-wheel drive rocker- of avionics. Time and money lost in developing custom bogey chassis outfitted with electronics and instruments architectures for each new robot makes it increasingly appropriate for supporting research relevant to remote important to develop extensible hardware architectures that exploration [2] [3] [4]. K9’s overall dimensions are 1.05m can expand and accommodate rapid changes in configu- long by 0.85m wide by 1.6m high, with a mass of ap- ration, including transfer to an entirely different mobile proximately 65 kg and a top speed of approximately 6 platform [1]. -

To Return to Campus Next Month Friday 82˚
Thursday, July 16, 2020 Vol. 19 No. 15 OBITUARIES COMMENTARY NEWS HEALTH Mourning local Plagued by illegal Roybal-Allard Rite Aid now deaths fireworks targets FAA offers testing SEE PAGE 2 SEE PAGE 3 SEE PAGE 7 SEE PAGE 11 Students ‘highly unlikely’ to return to campus next month Friday 82˚ Following the lead of pending decisions to be made Saturday 84˚ LAUSD, Downey officials at the Board of Educations upcoming July 20 meeting. said students will likely start the fall semester at The superintendent for the home. Los Angeles Unified School Sunday 86˚ District announced Monday that students will not return to the classroom when the fall semester DOWNEY — Students will begins next month. likely not be returning to school ON THIS DAY campuses at the start of the Along with LAUSD, the San school year, according to the Diego Unified School District will JULY 16 Downey Unified School District. also begin its fall semester in a virtual format. The two districts 1769: With many COVID-19 related released a joint statement Father Junipero Serra founded regulations in constant flux, confirming the move. California’s first mission, Mission San DUSD has spent most of the Diego de Alcala. Over the following summer with very few answers “Both districts will continue decades, it evolved into the city of San as to how the upcoming school planning for a return to in- Diego. year might look. person learning during the 2020- 21 academic year, as soon as 1861: It was only recently the public health conditions allow,” Under orders from President Abraham district released some sort of the statement read. -

Mouser Electronics and Grant Imahara Explore Prototype Design with Arduino in Latest “Engineering Big Ideas” Series Video
For Immediate Release Mouser Electronics and Grant Imahara Explore Prototype Design with Arduino in Latest “Engineering Big Ideas” Series Video October 9, 2019 – Mouser Electronics Inc. and celebrity engineer Grant Imahara today released the second video in the Engineering Big Ideas series, part of Mouser’s award-winning Empowering Innovation Together™ program. Watch the latest video at mou.sr/EIT2019-2. In the second video of the Engineering Big Ideas series, Mouser and Imahara take viewers along to Milan, Italy, for a visit to Arduino®, one of the world’s leading open- source hardware and software ecosystems. Imahara sits down with Arduino co- founder and CTO Massimo Banzi to examine the prototyping tools designers and developers use to understand and articulate the capabilities and limits of an idea. The pair also explores how the open source movement contributes to broadening access to innovation. The Engineering Big Ideas series is sponsored by Mouser’s valued suppliers Analog Devices, Intel®, Microchip Technology and Molex. “We are excited about this second episode of Engineering Big Ideas. Prototype design is meant to create something completely new,” said Glenn Smith, President and CEO of Mouser Electronics. “Through open source hardware and software, companies like Arduino present significant opportunity to designers and developers by removing barriers and opening gates to innovation.” “Open source is a perfect example of innovation through collaboration and shared access to knowledge,” added Imahara. “Rapid prototyping is a natural fit for this environment; ideas can come to life quickly and cost-effectively.” Global electronic component distributor Mouser Electronics is teaming up with engineer Grant Imahara for the fifth consecutive year to present the Engineering Big Ideas series, which explores the process of turning an idea into a product and examines the path to commercialization — from discovery to design and eventually development. -
Capability Gap 2 “Deep Dive” Analysis Synopsis
The International Forum to Advance First Responder Innovation Capability Gap 2 “Deep Dive” Analysis Synopsis September 2017 Sponsored by: Effort sponsored in whole or in part by the Department of Homeland Security (DHS) Science and Technology Directorate (S&T) and the Air Force Research Laboratory (AFRL), under Memorandum of Understanding/Partnership Intermediary Agreement No. FA8650- 09-3-9400. The U.S. government is authorized to reproduce and distribute reprints for governmental purposes notwithstanding any copyright notation thereon. The views and conclusions contained herein are those of the authors and should not be interpreted as necessarily representing the official policies or endorsements, either expressed or implied, of the DHS S&T or the AFRL. Analysis Conducted by: The following study was completed by FirstLink. It represents the best efforts of the FirstLink team to gather, assimilate and assess certain information pertaining to this report. It is recognized that this study analyzes certain economic conditions. As these conditions are in constant flux, neither FirstLink nor its members (Pittsburgh Gateways Corp., AMTV, LLC or its affiliates) can be responsible for these conditions. Any decisions, actions or investment made on the subject covered are solely those of the client. Forum Endorsement: This document has been checked for accuracy by the International Forum to Advance First Responder Innovation and accords with our aims to inform and guide industry and provide unbiased information on first responder technologies. However, the views and conclusions contained herein are those of the authors and should not be interpreted as necessarily representing the official policies either expressed or implied by the Forum. -

Free Radicals: Battlebots
The Electrochemical Society Interface FEATURED ARTICLES Free Radicals: Battlebots To cite this article: Dale Hall 2002 Electrochem. Soc. Interface 11 9 View the article online for updates and enhancements. This content was downloaded from IP address 170.106.202.58 on 25/09/2021 at 19:07 hus begins another on. And while contes- televised half-hour tants who watch their of Battlebots, a robots get taken apart cable television in the ring grimace in show with a real pain, good modestT but enthusiastic sportsmanship gener- audience who enjoy The box is locked, the lights are on, it’s robot fightin’ time! ally prevails. In post- watching mechanized fight interviews, monsters locked in mortal combat. winners are gracious toward their oppo- Every week, pairs of angry gizmos by Dale Hall nents, while losers praise the mechan- square off in three-minute bouts to ical prowess and driving skill of the of torque, and the like. (I can hear a decide which is the mightiest of them victors. million ten-year old boys now: "But all. Piloted by their builders via radio As a scientist with a materials back- Mom! It’s educational!") controls, the robots fly around a walled ground, I like to see what happens How about robot combat as an arena full of deadly obstacles, wheeling when material meets material on the exemplar of family values, a sense of and turning, always probing for the field of combat. How much punish- opponent’s weak spot — ment can 10 mm Lexan perhaps a tire, or a pro- take, anyway? (A lot, jecting feature that can judging from recent be grabbed, torn off, combat.) Is there any real sliced, or beaten into a advantage to Kevlar in the pile of twisted metal. -

10/1 Manuel Espinosa (E
South Orange County Community College District EXHIBIT A SADDLEBACK COLLEGE 1 of 6 COMMUNITY EDUCATION NOT-FOR-CREDIT/FEE-BASED PROGRAM - Summer 2020 PROGRAM ACTIVITY TITLE DATES TRAINER HONORARIA FEE Adult ¡A Conversar! Basic Spanish Conversation 5/1 - 10/1 Manuel Espinosa (E) 40% Net $120 52 Essential Conversations to Have with Your Tweens and Teens 5/1 - 10/1 Mind Brain Parenting (I) 40% Net $39 Acrylic/Oil Painting Workshop 5/1 - 10/1 Sansanee Boonyad (E) 40% Net $147 Adult ADHD Crash Course: ADHD 101 5/1 - 10/1 Natalia van Rikxoort (E) 40% Net TBA Advanced Selling on eBay 5/1 - 10/1 Frances Greenspan (E) 40% Net $65 Become a Live Scan Fingerprint Roller/Operator 5/1 - 10/1 livescanclasses.com (I) 40% Net $349 Become A Professional Organizer 5/1 - 10/1 Nancy Miller (E) 40% Net $39 Beginning and Intermediate Watercolor Workshop 5/1 - 10/1 Sansanee Boonyad (E) 40% Net $168 Beginning Blues Harmonica 5/1 - 10/1 David Broida (E) 40% Net $49 Beginning Guitar 5/1 - 10/1 Ron Gorman (E) 40% Net $99 Beginning Ukulele 5/1 - 10/1 Ron Gorman (E) 40% Net $100 Beyond Beginning Ukulele 5/1 - 10/1 Ron Gorman (E) 40% Net $100 Blogging for Fun and Profit 5/1 - 10/1 Bob Cohen (I) 40% Net $39 Botanicals Watercolor Workshop 5/1 - 10/1 Corinne Haig (E) 40% Net $168 CBEST - California Basic Educational Skills Test 5/1 - 10/1 BTPS Testing Sandra Edwards (I) 40% Net $355 College Essay Boot Camp 5/1 - 10/1 Meredith Ritner (E) 40% Net TBA Community (HOA) Leadership Training Program 5/1 - 10/1 Community Associations Institution (I) 40% Net $75 Create Your Own -

Oconomowoc High School Clubs 2020-2021
OCONOMOWOC HIGH SCHOOL CLUBS 2020-2021 1 TABLE OF CONTENTS Page 3 - Baton Page 4 - Best Buddies Page 5 - Black Student Union Page 6 - Business Honor Society Page 7 - Chess Club Page 8 - Chinese Honor Society Page 9 - C.L.A.S.P. Page 10 - Combat Robot Club Page 11 - DECA Page 12- Delta Epsilon Phi (German Honor Society) Page 13- Digital Design Page 14- English Honor Society Page 15- FBLA Page 16- FFA Page 17- French Honor Society Page 18- GAPP (German/American Partnership Program) Page 19- Global Scholars Program/GEAC Page 20- JSA (Junior Statesmen of America) Page 21- Jazz Band I & II Page 22- Jazz Combo Page 23- LINK Leaders Page 24- Math Club Page 25- Model UN Page 26- Mu Alpha Theta (Math Honor Society) Page 27- National Honor Society Page 28- OHS Builders Page 29- PAWS (No Fee Required) Page 30- Pep/Marching Band Page 31- Photography Club (No Fee Required) Page 32- Rho Kappa (Social Studies Honor Society) Page 33- Robotics Page 34- Rockestra Page 35- Rock Climbing Page 36- SAGA (No Fee Required) Page 37- Science Honor Society Page 38- Spanish Honor Society Page 39- Student Council Page 40- Students 4 Service Page 41- Theater (Plays) Page 42- Thespian Society Page 43- Trap Shooting Club Page 44- Tri-M Music Honor Society Page 45- Video Game Page 46- Vocal Jazz and Pop (Gold Vibrations & Golden Gals) 2 BATON CLUB Eligibility Requirements: Members must complete an online application and have some twirling experience Time Commitment/Location: After school on Thursdays Description: A place for experienced twirlers to come together to create new routines and perform for local schooling events.