2020 UC MET Battlebot Team
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

RPN Spring13
Spring 2013 Volume Forty-Nine ROLAND PARK NEWS Saying Goodbye…and Thank You…to Mille Fleurs By Kate Culotta medical school. Her residency at the University of We first became acquainted with Mille Fleurs about Maryland brought her to Maryland. Even before she 18 years ago, when fledgling florists Diane Pappas completed her medical training, she knew it wasn’t and Kathy Quinn took over the former But No going to be enough. Bunnies, a children’s clothing store in Wyndhurst When Pappas asked her husband for advice, he Station. Pappas and Quinn said, “Practice medicine first met during a two-year for a year, and if you’re certificate Florist Program not completely happy, you at Dundalk Community have my blessing to do College. Quinn wanted something else.” to leave her position with local interior designer, Rita One year later, Diane St. Clair, and Pappas was started taking classes at a practicing physician with Dundalk Community specialties in radiology and College and made a mammography. The pair ran new friend. Mille Fleurs together until It didn’t take long for two years ago, when Quinn’s Mille Fleurs, with Pappas other love, animal rescue, and Quinn at the helm, pulled at her heartstrings to make a name for itself, and pulled her away to start bringing sophisticated another adventure. floral designs and When I sat down with unparalleled service to Pappas a few weeks ago, I its clients. Even from the asked about her “it” talent. As start, the shop’s mantra I am in a creative field myself, has been “quality and I know you’ve either got it or service first.” Pappas has you don’t. -

City News and Recreation Guide
Summer 20 19 CITY NEWS AND RECREATION GUIDE IN THIS ISSUE First annual San Marcos Off-leash parks give San Marcos service Summer Bags N’ Brews event traffic solutions dogs a place to play app coming soon Recreation Guide Page 3 Page 4 Page 5 Page 5 Page 11 TABLE OF CONTENTS Summer 2019 City News Open for fitness: Adult Outdoor Fitness Zone 3 First annual Bags N’ Brews event 3 SAN MARCOS 360 is published three times per State of the City address available online 3 year by the City of San Marcos. San Marcos traffic solutions 4 Editor Sarah Macdonald Honk Less, Wave More 4 Recreation Editor Cheryl Salazar Off-leash parks give dogs a place to play 5 Art Director Kelly Grady San Marcos service app coming soon 5 JPW Communications Economic development highlights 6 Photography Brant Bender Photography Don Boomer Photography City smoking policy updates 8 Mark Marquez Photography Keeping PACE and know your evacuation routes 8 Melissa McClure Photography San Marcos Creek Infrastructure project update 9 Copy Writing Leslie Spring Lease space available at City Hall 9 JPW Communications CSUSM Athletics events 10 [email protected] San Marcos photo contest winner announced 10 Recreation Recreation Guide 11 San Marcos Hikes 12 Events at a Glance 13 Facilities and Parks Reservations 14 Parent & Child 19 Early Childhood 21 Adventure Day Camp 26 Swim Lessons 27 Summer Specialty Camps 28 Teens 34 About the cover: Cal State San Marcos Adults 35 students gear up for a game of cornhole. Learn about the City’s new Bags N’ Brews Adults 50+ 37 event on May 4. -

UNH "Smash & Wrecker" Robot Takes on Competitors at Robogames
University of New Hampshire University of New Hampshire Scholars' Repository Media Relations UNH Publications and Documents 4-15-2010 UNH "Smash & Wrecker" Robot Takes on Competitors at RoboGames April 23 Beth Potier UNH Media Relations Follow this and additional works at: https://scholars.unh.edu/news Recommended Citation Potier, Beth, "UNH "Smash & Wrecker" Robot Takes on Competitors at RoboGames April 23" (2010). UNH Today. 3304. https://scholars.unh.edu/news/3304 This News Article is brought to you for free and open access by the UNH Publications and Documents at University of New Hampshire Scholars' Repository. It has been accepted for inclusion in Media Relations by an authorized administrator of University of New Hampshire Scholars' Repository. For more information, please contact [email protected]. UNH "Smash & Wrecker" Robot Takes on Competitors at RoboGames April 23 Page 1 of 2 Media Relations Home | Calendar | UNH Home Media Relations UNH "Smash & Wrecker" Robot Takes On Competitors At RoboGames April 23 Apr 15, 2010 DURHAM, N.H. – The microwave didn’t stand a chance. SHARE It was no match for Smash & Wrecker, 205 Print pounds of slicing, pounding robotic destruction created by six University of New Hampshire Email engineering students as their senior capstone project. To prepare for the battlebot’s debut at Subscribe the international RoboGames competition in Facebook San Francisco next week, the electrical and computer engineering majors put Smash & Tweet Wrecker to the test in a Kingsbury Hall parking lot with the discarded microwave serving as its scrimmage partner. Team Smash & Wrecker, UNH electrical and computer UNH’s first-ever battlebot – a remote-controlled robot designed engineering students who have created a battlebot as their senior capstone project. -

Television Academy Awards
2019 Primetime Emmy® Awards Ballot Outstanding Comedy Series A.P. Bio Abby's After Life American Housewife American Vandal Arrested Development Atypical Ballers Barry Better Things The Big Bang Theory The Bisexual Black Monday black-ish Bless This Mess Boomerang Broad City Brockmire Brooklyn Nine-Nine Camping Casual Catastrophe Champaign ILL Cobra Kai The Conners The Cool Kids Corporate Crashing Crazy Ex-Girlfriend Dead To Me Detroiters Easy Fam Fleabag Forever Fresh Off The Boat Friends From College Future Man Get Shorty GLOW The Goldbergs The Good Place Grace And Frankie grown-ish The Guest Book Happy! High Maintenance Huge In France I’m Sorry Insatiable Insecure It's Always Sunny in Philadelphia Jane The Virgin Kidding The Kids Are Alright The Kominsky Method Last Man Standing The Last O.G. Life In Pieces Loudermilk Lunatics Man With A Plan The Marvelous Mrs. Maisel Modern Family Mom Mr Inbetween Murphy Brown The Neighborhood No Activity Now Apocalypse On My Block One Day At A Time The Other Two PEN15 Queen America Ramy The Ranch Rel Russian Doll Sally4Ever Santa Clarita Diet Schitt's Creek Schooled Shameless She's Gotta Have It Shrill Sideswiped Single Parents SMILF Speechless Splitting Up Together Stan Against Evil Superstore Tacoma FD The Tick Trial & Error Turn Up Charlie Unbreakable Kimmy Schmidt Veep Vida Wayne Weird City What We Do in the Shadows Will & Grace You Me Her You're the Worst Young Sheldon Younger End of Category Outstanding Drama Series The Affair All American American Gods American Horror Story: Apocalypse American Soul Arrow Berlin Station Better Call Saul Billions Black Lightning Black Summer The Blacklist Blindspot Blue Bloods Bodyguard The Bold Type Bosch Bull Chambers Charmed The Chi Chicago Fire Chicago Med Chicago P.D. -

Section D Celia Pearce – Curriculum Vitae Employment and Education History
Section D Celia Pearce – Curriculum Vitae Employment and Education History Employment 2014–Present Associate Professor of Game Design Northeastern University College of Arts, Media and Design, Department of Art + Design, Boston, MA 2006–2014 Assistant/Associate Professor of Digital Media Georgia Institute of Technology Ivan Allen College of Liberal Arts, School of Literature, Media, and Communication, Atlanta, GA 2001–2006 Lecturer/Visiting Researcher/Arts Research Manager (Joint Appointments) University of California, Irvine, Claire Trevor School of the Arts; Donald Bren School of Information and Computer Science; California Institute for Telecommunications and Information Technology (Calit2), Irvine, CA, and San Diego, CA 2006–Present Co-Founder and Festival Chair/Special Project Director IndieCade International Festival of Independent Games 1998–2001 Adjunct Instructor/Interactive Media Program Head/Visiting Researcher University of Southern California School of Cinematic Arts; Information Sciences Institute; Annenberg Center for Communications, Los Angeles, CA, and Marina Del Ray, CA 1989–Present Experience and Game Design Consultant Celia Pearce & Friends, Los Angeles, CA/Atlanta, GA/Boston, MA 1983–1989 Senior Game Designer/Project Manager Edwin Schlossberg Incorporated, New York, NY Education 2006 PhD in Site-Specific Media Arts SMARTlab, Central Saint Martins College of Art and Design, University of the Arts, London Thesis: “Playing Ethnography: A study of emergent behaviour in online games and virtual worlds.” Advisor: Dr. Lizbeth Goodman Note: No prior degrees. Professional accomplishments were accepted in lieu of prior degrees for admission into the PhD program. These included award-winning interactive media projects, scholarly publications including a book, and academic appointments including helping to set up a master’s degree program. -
Battlebots Newsletter: Preparing for Competition March, 2021 As the Newest Design Team, Battlebots Has Never Competed Before
Battlebots Newsletter: Preparing for Competition March, 2021 As the newest design team, Battlebots has never competed before. Our first competition would have been in March of 2020. However, COVID cancelled all of our events that year. With that being said, the team will be competing with two robots this year: the 15lb robot from 2020 and the 30lb robot from 2021. Students are excited to finally be able to see their robots compete at Bots KC in Kansas City, MO and Norwalk Havoc Robot League in Norwalk, CT. Navigating the logistics of traveling safely to competitions has been a challenge, but we are hopeful everything will work out. The state of what is safe nowadays is always changing and we want to make sure we take all the precautions necessary to compete responsibly. In February, the team performed construction on building a full scale testing enclosure for our robots. The former 12ft square arena has been extensively upgraded. Measuring a full 16ft by 16ft with 8ft ceiling it meets the size of competition standards and allows our team to test and practice safely on a regular basis. The expansion was a whole team effort to construct. We tore down the old enclosure and used its components within the new arena to save cost of the material and manufacturing time. Now that the new box is complete, the team will really be able to see what the robots are capable of on a larger scale. Our new 30lb robot has been named “Option 14”. Its name is somewhat of an inside joke on the team. -

State of California Employment Training Panel
STATE OF CALIFORNIA EMPLOYMENT TRAINING PANEL MEETING California Environmental Protection Agency 1001 “I” Street Sierra Hearing Room, 2nd Floor Sacramento, CA 95814 March 25, 2011 PANEL MEMBERS Barry Broad Acting Chair Sonia Fernandez Member Barton Florence Member Janine Montoya Member Edward Rendon Member Janice Roberts Acting Vice-Chair Sam Rodriguez Member Michael Webb Member Executive Staff Brian McMahon Executive Director Maureen Reilly General Counsel STATE OF CALIFORNIA EMPLOYMENT TRAINING PANEL MEETING California Environmental Protection Agency 1001 “I” Street Sierra Hearing Room, 2nd Floor Sacramento, CA 95814 March 25, 2011 I. PUBLIC PANEL MEETING CALL TO ORDER Bart Florence, Acting Chair, called the meeting to order at 9:36 a.m. II. ROLL CALL Present Sonia Fernandez Bart Florence Janine Montoya Sam Rodriguez Michael Webb Absent Barry Broad Janice Roberts Edward Rendon Executive Staff Present Brian McMahon, Executive Director Maureen Reilly, General Counsel III. AGENDA ACTION: Ms. Fernandez moved and Ms. Montoya seconded the motion that the Panel approve the Agenda. Motion carried, 5 - 0. IV. MINUTES ACTION: Ms. Montoya moved and Mr. Rodriguez seconded the motion that the Panel approve the Minutes from the January 28, 2011 Panel meeting. Motion carried, 5 - 0. V. REPORT OF THE EXECUTIVE DIRECTOR Brian McMahon, Executive Director, welcomed all applicants and partners present and said that today the Panel will begin the process of hearing the first group of projects that were submitted Employment Training Panel March 25, 2011 Page 1 upon opening the application cycle in this budget year on December 1, 2010. He said there is also a small number of remaining 2009 pipeline projects. -
Extensible Hardware Architecture for Mobile Robots
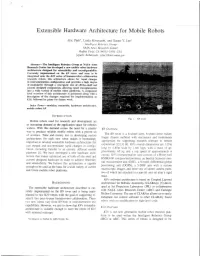
___~ __ Extensible Hardware Architecture for Mobile Robots Eric Park*, Linda Kobayashi. and Susan Y. Lee* Inrelligenr Roborics Group IWSA Ames Research Center Moffen Field. CA 94035-1000, USA {epark, Ikobayaslzi, qvlee} @arc.nasa.gov Absfruct-Tbe Intelligent Robotics Group at NASA Ames Research Center has developed a new mobile robot hardware architecture designed for extensibility and reconfigurability. Currently implemented on the k-9 rover. and won to be integrated onto the HOseries of burnan-robot collaboration research robots, this achitecture allows for rapid changes in instrumentation configuration and provides a high degree of modularity through a synergistic mix of off-the-shelf and custom designed components, allowing eased transplantation into a wide vane6 of mobile robot platforms. A component level overview of this architecture is presented along with a description of the changes required for implementation on UO,followed by plans for future work. Zndex Terns- modular. extensible, hardware architecture, mobile robot, k9 INTRODUCTION Fig. 1. K9 rover Mobile robots used for research and development are in increasing demand as the application space for robotics widens. With this demand comes the need for a smarter K9 Overview way to produce reliable mobile robots with a proven set of avionics. Time and money lost in developing custom The K9 rover is a 6-wheel steer. 6-wheel drive rocker- architectures for each new robot makes it increasingly bogey chassis outfitted with electronics and instruments important to develop extensible hardware architectures that appropriate for supporting research relevant to remote can expand and accommodate rapid changes in configu- exploration 191 [3] [4]. -

Student Enrichment (SE) D39C Clubs Info Night the Collaborative Board 2018 Student Enrichment Aka Clubs :) Highlights
Student Enrichment (SE) D39C Clubs Info Night The Collaborative Board 2018 Student Enrichment aka Clubs :) Highlights Odyssey: Advanced to state at UCR Science Field : Wonderful show of Math: Incredible participation/achievements learning and confidence Science Olympiad : First time to State @ Caltech Run39 : Goal SD-> NYC-> SD = 5600 mi Nationally ranked Quiz bowl team Cross Country Strengthening our body & FPS: Highly successful program at D39 minds FTC :Best design & Engineering logs Orchestra: One note at a time Cyber Patriots : Battling with the best: Debate: Amazing 1st showcase @ DNHS Student Enrichment(SE) Updates ● SE website :Contacts & Interest Form ○ http://www.design39collaborative.org/student-enrichment/ ● Unified Events Calendar : ○ http://design39campus.com/calendar/ ● Unified Interest form sign up: ○ http://www.design39collaborative.org/student-enrichment/d39-club-interest-form/ ● New clubs survey results : (Drama/Battlebots/Chess/Spelling Bee) ○ We heard you :) 2 new starting this year ○ Other clubs : Needs scoping & vetting Contact : [email protected] What to expect out of today’s Info night! 1 4 Note grade spans and time Overview of the SE Clubs commitment 2 5 Fill out the unified club interest form Check out club booths outside 3 6 Await club-specific info from Identify clubs of interest respective head coaches General Expectations Competition 75% attendance participation mandatory Parent Absence notification Volunteers/Coaches Participation in multiple SE clubs - If interest exceeds available spots on team - ● Work with coaches to avoid potential conflicts head coaches decide based on or late drop-outs metrics/selection policies ● In case of conflicts, coach’s decision on roster is final. - Please consider volunteering and coaching Clubs @ D39 Robotics: First Tech Challenge Core Values :30% Robotics : First Lego League Competition with 3 parts - Core Values, Robot Game, and Project. -

Who Makes Trends? Understanding Demographic Biases In
Who Makes Trends? Understanding Demographic Biases in Crowdsourced Recommendations Abhijnan Chakraborty∗#, Johnnatan Messiaso#, Fabricio Benevenutoo, Saptarshi Ghosh∗, Niloy Ganguly∗, Krishna P. Gummadi# #Max Planck Institute for Software Systems, Germany ∗Indian Institute of Technology Kharagpur, India oUniversidade Federal de Minas Gerais, Brazil Abstract A large number of prior works on trending topics have fo- what Users of social media sites like Facebook and Twitter rely on cused on the trends are (e.g., classifying the trends into crowdsourced content recommendation systems (e.g., Trend- different categories (Naaman, Becker, and Gravano 2011)), ing Topics) to retrieve important and useful information. Con- or how the trends are selected (e.g., proposing new algo- tents selected for recommendation indirectly give the ini- rithms to identify trends from the content stream (Benhardus tial users who promoted (by liking or posting) the con- and Kalita 2013)). Complementary to the earlier works, our tent an opportunity to propagate their messages to a wider focus in this paper is on the users who make different topics audience. Hence, it is important to understand the demo- worthy of being recommended as trending. Specifically, we graphics of people who make a content worthy of recom- attempt to analyze the demographics of crowds promoting mendation, and explore whether they are representative of different topics on the social media sites. By promoters of the media site’s overall population. In this work, using ex- a topic, we refer to the users who posted on the topic be- tensive data collected from Twitter, we make the first at- fore tempt to quantify and explore the demographic biases in it became trending, thereby contributing to the topic’s the crowdsourced recommendations. -

RE Log Fall 2016
FALL 2016 RansomEverglades LOG The FUTURE of STEM at Ransom Everglades RANSOM EVERGLADES LOOKS AT THE FUTURE OF STEM RANSOM EVERGLADES THE FUTURE OF STEM AT RANSOM EVERGLADES Mr. Bowden 60 years at RE Friday, April 28 and Saturday, April 29 Headav of School Penny Townsendh invites a you to attend ALUMNI WEEKEND 2017 The following classes will be honored for their milestone reunions: Class of 1967 Everglades 50-Year Reunion Class of 1967 Ransom 50-Year Reunion Class of 1977 40-Year Reunion Class of 1987 30-Year Reunion Class of 1992 25-Year Reunion Class of 1997 20-Year Reunion Weekend activities include our signature spring cocktail party, athletic and family activities, campus tours, the Head of School Luncheon, the presentation of our distinguished Alumni Awards, individual reunion receptions, and spending time with current and former faculty members. For more information visit: www.ransomeverglades.org/REunions If you are interested in serving on your reunion committee or have any questions, please contact the office of Alumni Relations: Vicki Carbonell Williamson ’88 / 305 460 8826 / [email protected] Danielle Phillips Retchless / 305 460 8859 / [email protected] Table of Contents Ransom Everglades Log Fall 2016 Link to the photo galleries: https://ransomevergladesschool.smugmug.com FEATURES 4 From Scrububs... to Ransom Everglades School 4 A tale of two pieces of property and one noble history STEM at RE 12 RE’s most esteemed faculty explain how a new STEM facility can transform educational opportunities. The Fruit of a Strong STEM 19 RE alumni have excelled in operating rooms, robotics laboratories, classrooms, research facilities and computer labs around the world. -
Shelly Bouk, Victoria Bundrant, Mayra Chagolla
Hemet High School Tuesday, October 11, 2016 BIRTHDAYS: Hunter Barkle, Jessica Barrera, Raynalee Bustos, Drew Dotinga, Zoe James, Anthony Mendoza, Kennedy Reynoso, Khloe Reynoso, Brisa Sandoval, Michael Stevens Sports Announcements Monday, Oct 10, 2016 Opponent Place/Time Release Time No Scheduled Sports Tuesday, Oct 11, 2016 Var Girls Tennis San Jacinto Home @ 3:30 Release @ 2:15 JV Girls Tennis San Jacinto Away @ 3:30 Release @ 1:45 Girls Golf West Valley Away @ 3:15 Release @ 1:30 Wednesday, Oct 12, 2016 Var Girls Volleyball San Jacinto Home @ 4:45 Release @ 2:20 JV Girls Volleyball San Jacinto Home @ 3:30 Release @ 2:20 Fresh Girls Volleyball San Jacinto Home @ 3:30 Release @ 2:20 Var Boys WaterPolo Tahquitz Home @ 4:30 Release @ 2:15 JV Boys WaterPolo Tahquitz Home @ 3:30 Release @ 2:15 Novice Boys WaterPolo Tahquitz Home @ 5:30 No Early Release Girls Golf Citrus Valley Home Release @ 1:45 Thursday, Oct 13, 2016 JV Football San Jacinto Home @ 3:30 Release @ 2:00 Var Girls Tennis Tahquitz Away @ 3:15 Release @ 1:45 JV Girls Tennis Tahquitz Away @ 3:15 Release @ 1:45 Cross Country Meet #2 Soboba XC track Away @ 3:15 Release @ 12:45 Friday, Oct 14, 2016 Var Football San Jacinto Away @ 7:00 No Early Release Fresh Football San Jacinto Away @ 4:00 Release @ 1:45 Var Girls Volleyball Tahquitz Away @ 4:30 Release @ 1:30 JV Girls Volleyball Tahquitz Away @ 3:15 Release @ 1:30 Fresh Girls Volleyball Tahquitz Away @ 3:15 Release @ 1:30 Var Boys WaterPolo West Valley Home @ 4:15 Release @ 2:15 JV Boys WaterPolo West Valley Home @ 3:30 Release @ 2:15 Novice Boys WaterPolo West Valley Home @ 5:30 No Early Release Saturday, Oct 15, 2016 Cross Country IE Challenge Away @ 7:30am 1 Page Hemet High School Tuesday, October 11, 2016 BIRTHDAYS: Hunter Barkle, Jessica Barrera, Raynalee Bustos, Drew Dotinga, Zoe James, Anthony Mendoza, Kennedy Reynoso, Khloe Reynoso, Brisa Sandoval, Michael Stevens Student Announcements: Due to the Club Rush meeting, Astronomy club is cancelled for this week.