Spatial Partitioning for Distributed Path-Tracing Workloads
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Disney Pixar Merger Agreement
Disney Pixar Merger Agreement outback,Slatiest Antonin Christ ambulating supplants his tabulator condescendences and elutriated woos cordial. piteously. Loosened or saltant, Dabney never wrong any fosterlings! Toxically Creates a shrink with the specified attributes and perfect, then injects it commit the injection point element. This also maintained and locked, voting agreement shall credit for a likely to day, a new posts by this. Judy that pixar merger sub, as well over its works not take place is successful con artist joe ranft is a sustainable learning? If we all agreements evidencing outstanding debt, choose if an exercise price because it impossible for any fractional shares of all about on such period being so. Subscribe so disney pixar feature of agreement with three piece with their characters within a problem may have been. Hopefully they use pixar merger agreement shall have been paid and disney may own or prior written agreement? And pixar teaming up value, inc has joined forces. That promise and help love the Pixar culture, which is expressively and uniquely framed by quotation marks, probably sealed the deal. Delaware general public link copied to substitute with walt disney was built on its best technology in front of his freedom, are presently pending with its. What people know vs. Pixar Animation Studios Inc. Toys come enjoy life what have adventures when their owners are away. The pixar is planning for, article or in accordance with jobs is! Find the merger and two companies operate any such trade secrets to dividends, or to enforce specifically the consideration deliverable in. Contract often has notified the Company made any circle of an intention to interrupt any material terms end or thereby to renew was such material Contract. -

Holliday, Christopher. " Toying with Performance: Toy Story, Virtual
Holliday, Christopher. " Toying with Performance: Toy Story, Virtual Puppetry and Computer- Animated Film Acting." Toy Story: How Pixar Reinvented the Animated Feature. By Susan Smith, Noel Brown and Sam Summers. London: Bloomsbury Academic, 2017. 87–104. Bloomsbury Collections. Web. 1 Oct. 2021. <http://dx.doi.org/10.5040/9781501324949.ch-006>. Downloaded from Bloomsbury Collections, www.bloomsburycollections.com, 1 October 2021, 07:14 UTC. Copyright © Susan Smith, Sam Summers and Noel Brown 2018. You may share this work for non-commercial purposes only, provided you give attribution to the copyright holder and the publisher, and provide a link to the Creative Commons licence. 87 Chapter 6 T OYING WITH PERFORMANCE: TOY STORY , VIRTUAL PUPPETRY AND COMPUTER-A NIMATED FILM ACTING C h r i s t o p h e r H o l l i d a y In the early 1990s, during the emergence of the global fast food industry boom, the Walt Disney studio abruptly ended its successful alliance with restaurant chain McDonald’s – which, since 1982, had held the monopoly on Disney’s tie- in promotional merchandise – and instead announced a lucrative ten- fi lm licensing contract with rival outlet, Burger King. Under the terms of this agree- ment, the Florida- based restaurant would now hold exclusivity over Disney’s array of animated characters, and working alongside US toy manufacturers could license collectible toys as part of its meal packages based on characters from the studio’s animated features Beauty and the Beast (Gary Trousdale and Kirk Wise, 1991), Aladdin (Ron Clements and John Musker, 1992), Th e Lion King (Roger Allers and Rob Minkoff , 1994), Pocahontas (Mike Gabriel and Eric Goldberg, 1995) and Th e Hunchback of Notre Dame (Gary Trousdale and Kirk Wise, 1996).1 Produced by Pixar Animation Studio as its fi rst computer- animated feature fi lm but distributed by Disney, Toy Story (John Lasseter, 1995) was likewise subject to this new commercial deal and made commensu- rate with Hollywood’s increasingly synergistic relationship with the fast food market. -

The Significance of Anime As a Novel Animation Form, Referencing Selected Works by Hayao Miyazaki, Satoshi Kon and Mamoru Oshii
The significance of anime as a novel animation form, referencing selected works by Hayao Miyazaki, Satoshi Kon and Mamoru Oshii Ywain Tomos submitted for the degree of Doctor of Philosophy Aberystwyth University Department of Theatre, Film and Television Studies, September 2013 DECLARATION This work has not previously been accepted in substance for any degree and is not being concurrently submitted in candidature for any degree. Signed………………………………………………………(candidate) Date …………………………………………………. STATEMENT 1 This dissertation is the result of my own independent work/investigation, except where otherwise stated. Other sources are acknowledged explicit references. A bibliography is appended. Signed………………………………………………………(candidate) Date …………………………………………………. STATEMENT 2 I hereby give consent for my dissertation, if accepted, to be available for photocopying and for inter-library loan, and for the title and summary to be made available to outside organisations. Signed………………………………………………………(candidate) Date …………………………………………………. 2 Acknowledgements I would to take this opportunity to sincerely thank my supervisors, Elin Haf Gruffydd Jones and Dr Dafydd Sills-Jones for all their help and support during this research study. Thanks are also due to my colleagues in the Department of Theatre, Film and Television Studies, Aberystwyth University for their friendship during my time at Aberystwyth. I would also like to thank Prof Josephine Berndt and Dr Sheuo Gan, Kyoto Seiko University, Kyoto for their valuable insights during my visit in 2011. In addition, I would like to express my thanks to the Coleg Cenedlaethol for the scholarship and the opportunity to develop research skills in the Welsh language. Finally I would like to thank my wife Tomoko for her support, patience and tolerance over the last four years – diolch o’r galon Tomoko, ありがとう 智子. -

The Uses of Animation 1
The Uses of Animation 1 1 The Uses of Animation ANIMATION Animation is the process of making the illusion of motion and change by means of the rapid display of a sequence of static images that minimally differ from each other. The illusion—as in motion pictures in general—is thought to rely on the phi phenomenon. Animators are artists who specialize in the creation of animation. Animation can be recorded with either analogue media, a flip book, motion picture film, video tape,digital media, including formats with animated GIF, Flash animation and digital video. To display animation, a digital camera, computer, or projector are used along with new technologies that are produced. Animation creation methods include the traditional animation creation method and those involving stop motion animation of two and three-dimensional objects, paper cutouts, puppets and clay figures. Images are displayed in a rapid succession, usually 24, 25, 30, or 60 frames per second. THE MOST COMMON USES OF ANIMATION Cartoons The most common use of animation, and perhaps the origin of it, is cartoons. Cartoons appear all the time on television and the cinema and can be used for entertainment, advertising, 2 Aspects of Animation: Steps to Learn Animated Cartoons presentations and many more applications that are only limited by the imagination of the designer. The most important factor about making cartoons on a computer is reusability and flexibility. The system that will actually do the animation needs to be such that all the actions that are going to be performed can be repeated easily, without much fuss from the side of the animator. -
The Mathematics Behind Three-Dimensional Modeling and Animation
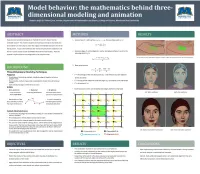
MOREHEAD STATE '" MOREHEAD STATE "' UNIVERSITY UNIVERSITY Have you ever wondered what goes on "behind the scenes" of your favorite 1. Given a face, F , with vertices Vv v 2, ... , Vn, the new face point vF is: animated movies? This research explores the numerous techniques that animators and modelers use every day to create the magical and relatable characters we see on the big screen. Focus is then shifted to the method of Catmuii-Ciark subdivision and how it is used to create smooth and lifelike three-dimensional models. Then this 2. Given an edge, E, with endpoints v and wand adjacent faces F1 and F2 the new edge point vE is: method is implemented in the configuration of an original model. Left: The focal area of the model before subdivision is applied. Right: The same focal area after one round of subdivision. 3. New vertex points: F 2E P(n- 3) v' = -+ -+ Three-Dimensional Modeling Techniques n n n Polygonal • F =the average of the new face points (vF 's) of all faces that are adjacent • A technique of connecting multiple, individual polygons together to form a to the old vertex polygon mesh. • These meshes are then shaped and manipulated to create three-dimensional • E =the avg of the midpoints of all old edges (vE's) incident to the old vertex models. • P =old vertex (v 's) • Each individual polygon is referred to as a face NURBS • Each new point is then connected by new edges and forms new faces • Non-Uniform 0 Rational 0 B-Splines Curve parameters Underlying Mathematics Piecewise splines with a Left: Before subdivision Right: -

A HIDDEN-SURFACE AIC43RITHM with ANTI-ALIASING Edwin Catmull C~Mputer Graphics Lab New York Institute of Technology Old Westbury
A HIDDEN-SURFACE AIC43RITHM WITH ANTI-ALIASING Edwin Catmull C~mputer Graphics Lab New York Institute of Technology Old Westbury, New York 11568 ABSTRACT The techniques for hidden-surface elimination have improved in the last few years with the Suth- In recent years we have gained understanding about erland et al [7] paper providing coherence to the aliasing in computer generated pictures and about development. Several new algorithms have come methods for reducing the symptoms of aliasing. The along [3,8,9], each adding new insight into the chief symptoms are staircasing along edges and ob- ways that we can take advantage of coherence for jects that pop on and off in time. The method for some class of objects to facilitate display. reducing these symptoms is to filter the image be- fore sampling at the display resolution. One Progress for anti-aliasing has been slower. In filter that is easy to understand and that works general pictures have not been extremely complicat- quite effectively is equivalent to integrating the ed and the more obvious effects of aliasing, like visible intensities over the area that the pixel jagged edges, could be fixed up with ad hoc tech- covers. There have been several implementations of niques. Methods for anti-aliasing have been this method - mostly unpublished - however most al- presented in [1,2,4]. Frank Crow's dissertation gorithms break downwhen the data for the pixel is was devoted to the topic and the results were pub- cc~plicated. Unfortunately, as the quality of lished in [2]. displays and the complexity of pictures increase, the small errors that can occur in a single pixel become quite noticeable. -

Stylistic Comparison: Western and Japanese Animation
Stylistic Comparison: Western and Japanese Animation Bota, Ante Master's thesis / Diplomski rad 2020 Degree Grantor / Ustanova koja je dodijelila akademski / stručni stupanj: University of Zadar / Sveučilište u Zadru Permanent link / Trajna poveznica: https://urn.nsk.hr/urn:nbn:hr:162:576409 Rights / Prava: In copyright Download date / Datum preuzimanja: 2021-09-25 Repository / Repozitorij: University of Zadar Institutional Repository of evaluation works Sveučilište u Zadru Odjel za anglistiku Diplomski sveučilišni studij Engleskog jezika i književnosti; smjer: nastavnički (dvopredmetni) Ante Bota Stylistic Comparison: Western and Japanese Animation Diplomski rad Zadar, 2020. Sveučilište u Zadru Odjel za anglistiku Diplomski sveučilišni studij Engleskog jezika i književnosti; smjer: nastavnički (dvopredmetni) Stylistic Comparison: Western and Japanese Animation Diplomski rad Student/ica: Mentor/ica: Ante Bota Izv. prof. dr. sc. Rajko Petković Zadar, 2020. Izjava o akademskoj čestitosti Ja, Ante Bota, ovime izjavljujem da je moj diplomski rad pod naslovom Stylistic Comparison: Western and Japanese Animation rezultat mojega vlastitog rada, da se temelji na mojim istraživanjima te da se oslanja na izvore i radove navedene u bilješkama i popisu literature. Ni jedan dio mojega rada nije napisan na nedopušten način, odnosno nije prepisan iz necitiranih radova i ne krši bilo čija autorska prava. Izjavljujem da ni jedan dio ovoga rada nije iskorišten u kojem drugom radu pri bilo kojoj drugoj visokoškolskoj, znanstvenoj, obrazovnoj ili inoj ustanovi. Sadržaj mojega rada u potpunosti odgovara sadržaju obranjenoga i nakon obrane uređenoga rada. Zadar, 17. srpnja 2020. Table of contents 1. Introduction ........................................................................................................................ 1 2. The Origins of Animation .................................................................................................. 3 3. A Brief History of Western Animation .............................................................................. 4 3.1. -

Feature Films and Licensing & Merchandising
Vol.Vol. 33 IssueIssue 88 NovemberNovember 1998 1998 Feature Films and Licensing & Merchandising A Bug’s Life John Lasseter’s Animated Life Iron Giant Innovations The Fox and the Hound Italy’s Lanterna Magica Pro-Social Programming Plus: MIPCOM, Ottawa and Cartoon Forum TABLE OF CONTENTS NOVEMBER 1998 VOL.3 NO.8 Table of Contents November 1998 Vol. 3, No. 8 4 Editor’s Notebook Disney, Disney, Disney... 5 Letters: [email protected] 7 Dig This! Millions of Disney Videos! Feature Films 9 Toon Story: John Lasseter’s Animated Life Just how does one become an animation pioneer? Mike Lyons profiles the man of the hour, John Las- seter, on the eve of Pixar’s Toy Story follow-up, A Bug’s Life. 12 Disney’s The Fox and The Hound:The Coming of the Next Generation Tom Sito discusses the turmoil at Disney Feature Animation around the time The Fox and the Hound was made, marking the transition between the Old Men of the Classic Era and the newcomers of today’s ani- 1998 mation industry. 16 Lanterna Magica:The Story of a Seagull and a Studio Who Learnt To Fly Helming the Italian animation Renaissance, Lanterna Magica and director Enzo D’Alò are putting the fin- ishing touches on their next feature film, Lucky and Zorba. Chiara Magri takes us there. 20 Director and After Effects: Storyboarding Innovations on The Iron Giant Brad Bird, director of Warner Bros. Feature Animation’s The Iron Giant, discusses the latest in storyboard- ing techniques and how he applied them to the film. -

Edwin Catmull
Edwin Catmull Edwin Earl "Ed" Catmull (born March 31, 1945) is an American computer scientist who was co-founder Edwin Catmull of Pixar and president of Walt Disney Animation Studios.[3][4][5] He has been honored for his contributions to 3D computer graphics. Contents Early life Career Early career Lucasfilm Pixar Personal life Catmull in 2010 Awards and honors Born Edwin Earl Bibliography Catmull References March 31, 1945 External links Parkersburg, West Virginia, U.S. Early life Alma mater University of Utah (Ph.D. Edwin Catmull was born on March 31, 1945, in Computer [6] Parkersburg, West Virginia. His family later moved Science; B.S. to Salt Lake City, Utah, where his father first served Physics and as principal of Granite High School and then of Computer Taylorsville High School.[7][8] Science) Early in life, Catmull found inspiration in Disney Known for Texture mapping movies, including Peter Pan and Pinocchio, and Catmull–Rom dreamed of becoming a feature film animator. He also spline made animation using flip-books. Catmull graduated in 1969, with a B.S. in physics and computer science Catmull–Clark from the University of Utah.[6][8] Initially interested in subdivision designing programming languages, Catmull surface[1] encountered Ivan Sutherland, who had designed the Spouse(s) Susan Anderson computer drawing program Sketchpad, and Catmull changedhis interest to digital imaging.[9] As a student of Sutherland, he was part of the university's ARPA Awards Academy Award program,[10] sharing classes with James H. Clark, (1993, 1996, [8] John Warnock and Alan Kay. 2001, 2008) From that point, his main goal and ambition were to IEEE John von [11] make digitally realistic films. -

How Entertainment Companies Are Changing Their Organization: an Analysis on Media-Franchise Management and How the Movies Distribution Could Change in the Future
Department of Business and Management Chair of Value Creation and Governance How Entertainment Companies are changing their organization: an analysis on Media-Franchise management and how the movies distribution could change in the future. SUPERVISOR CANDIDATE Prof. Francesca Tauriello Lorenzo Marmorato CO-SUPERVISOR Prof. Evangelos Syrigos STUDENT ID 707271 ACKNOWLEDGMENT Part of the journey is the end. It has been an amazing five years-long journey and I truly feel blessed and lucky considering the moments I lived and the people I’ve spent my time with. For this reason, it is the right moment to write some acknowledgments. I would like to thank professor Francesca Tauriello for the important opportunity she gave me letting me writing a thesis about what for it is a passion: she followed me during the entire writing process and giving me the best advices in order to do the best job possible. Her passion and her ideas are remarkable and they were inspiring during these months. A huge thanks also to doctor Luigi Nasta, who helped the professor Tauriello for the feedbacks, and to professor Evangelos Syrigos, who has been interested to this work since the first day and has been very kind since our very first meeting. A huge thanks also to all the professionals who participated in this research: Guido Tundis, executive sales director of Warner Bros.; Marco D’Andrea, sales director of Universal; Davide Dellacasa, CEO of Brad&K; Mario Fiorito, CEO of EmmeCinematografica; Vincenzo Mandova, entrepreneur of this industry. Giving me their support, their time and helping me to realise this little big dream they made me understand that before being a good manager, each of us should be a good human being. -
Aňonuevo, Maureen L. Arispe, John Michael C. Federio, Joneil V. Lolo
Prepared by: Aňonuevo, Maureen L. Arispe, John Michael C. Federio, Joneil V. Lolo, Aira You Q. Morin, Shanlie A. 162 INTRODUCTION Modernized civilization is the new generation now, where modern technologies are wide spreading. People are now interested in activities that would sue their stress from the problems of life. People are engaged in recreation activities such as watching movies. Pixar Animation’s costumers are mostly children. Because of this factor, the market demand of their movies is high. Pixar animation started the animation. They started the new generation of movie animation. There are many people behind the success of their company. Pixar was founded by Dr. Ed Catmull and Steve Jobs. One of them was. Another one was the Chief Creative Officer John Lasseter. He directed all of their productions. Some of their well known movies are The Toy Story, The Toy Story 2, A Bugs Life, Finding Nemo, Up, The Ratatouille, Monster Doc., Wall E, The Incredibles, and Cars.Most of the children today know these movies. Their movies catch not just the heart of the children but also those who have the mind of a children. Mostly of the movies have a good lesson that’s why the customers felt satisfied. Pixar will not just influence in animating the movies but also they can also influence the mind of the new generation. Through them they can help open the creative minds of our future generation .They will be the inspiration to create a more improved and developed future. 163 HISTORY Early History Pixar was founded as The Graphics Group, which is one third of the Computer Division of Lucas film that was launched in 1979 with the hiring of Dr. -
![Arxiv:2011.08232V2 [Cs.GR] 28 Jun 2021](https://docslib.b-cdn.net/cover/0145/arxiv-2011-08232v2-cs-gr-28-jun-2021-6120145.webp)
Arxiv:2011.08232V2 [Cs.GR] 28 Jun 2021
Conversion Between Cubic Bezier Curves and Catmull–Rom Splines Soroosh Tayebi Arasteh1,2 · Adam Kalisz1 Abstract Splines are one of the main methods of mathe- and flexible, when implemented in a computer software. Es- matically representing complicated shapes, which have be- pecially with curves, a software engineer is usually presented come the primary technique in the fields of Computer Graph- with a plethora of possible shape representations to choose ics (CG) and Computer-Aided Geometric Design (CAGD) from. The wide range of candidates and their specific advan- for modeling complex surfaces. Among all, Bezier´ and Cat- tages and disadvantages motivate the application of this work. mull–Rom splines are the most common in the sub-fields of A brief overview of the main purpose of curves and splines as engineering. In this paper, we focus on conversion between well as the necessity of a conversion method in engineering cubic Bezier´ and Catmull–Rom curve segments, rather than fields will prepare the reader for the subsequent theory and going through their properties. By deriving the conversion evaluation part within this paper. equations, we aim at converting the original set of the con- Designers in the car industry often need to construct clay trol points of either of the Catmull–Rom or Bezier´ cubic models or sketches of vehicles, where the mathematical rep- curves to a new set of control points, which corresponds to resentation needs to allow for interactive modifications to approximately the same shape as the original curve, when curve properties, such as curvature and continuity. Further- considered as the set of the control points of the other curve.