Design and Construction of an ROV for Underwater Exploration
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Jobsite Cameras Past, Present, Future
Jobsite Cameras Past, Present, Future How jobsite cameras are evolving in use and capability By David Gaw, Founder, CEO – Sensera Systems Jobsite cameras have become an essential tool for the modern connected jobsite. Understanding these systems and how they support construction best practices is important in today’s ever-expanding jobsite technology array. In this article, we’ll take a look at the evolution of jobsite cameras and how they are impacting the construction industry. WHAT IS A ‘JOBSITE CAMERA’? A jobsite camera is simply a camera that is used on a construction site to provide automated capture of imagery and/or video. Most would also agree that a jobsite camera is one that is network connected to allow for remote viewing and image retrieval. However, there are some more basic devices used on jobsites that record images and video to local storage for periodic manual retrieval by the user. For the purposes of our discussion here we will consider only network-connected cameras, since non-connected cameras are typically not suitable for commercial construction project applications. In addition to the camera hardware itself, a ‘jobsite camera’ typically also incorporates software that provides the following basic functions (at minimum): • Remote configuration of the camera operation • Viewing of images and video • Remote long-term storage of images and video (e.g., cloud-based storage) • Creation of time-lapse videos from individual still images collected at specified intervals BACK IN THE DAY The initial jobsite cameras grew out of early ‘webcam’ applications. A webcam is a camera that is connected to the Internet (or the Web), to allow for remote real-time viewing. -

Kinematic Modeling of a Rhex-Type Robot Using a Neural Network
Kinematic Modeling of a RHex-type Robot Using a Neural Network Mario Harpera, James Paceb, Nikhil Guptab, Camilo Ordonezb, and Emmanuel G. Collins, Jr.b aDepartment of Scientific Computing, Florida State University, Tallahassee, FL, USA bDepartment of Mechanical Engineering, Florida A&M - Florida State University, College of Engineering, Tallahassee, FL, USA ABSTRACT Motion planning for legged machines such as RHex-type robots is far less developed than motion planning for wheeled vehicles. One of the main reasons for this is the lack of kinematic and dynamic models for such platforms. Physics based models are difficult to develop for legged robots due to the difficulty of modeling the robot-terrain interaction and their overall complexity. This paper presents a data driven approach in developing a kinematic model for the X-RHex Lite (XRL) platform. The methodology utilizes a feed-forward neural network to relate gait parameters to vehicle velocities. Keywords: Legged Robots, Kinematic Modeling, Neural Network 1. INTRODUCTION The motion of a legged vehicle is governed by the gait it uses to move. Stable gaits can provide significantly different speeds and types of motion. The goal of this paper is to use a neural network to relate the parameters that define the gait an X-RHex Lite (XRL) robot uses to move to angular, forward and lateral velocities. This is a critical step in developing a motion planner for a legged robot. The approach taken in this paper is very similar to approaches taken to learn forward predictive models for skid-steered robots. For example, this approach was used to learn a forward predictive model for the Crusher UGV (Unmanned Ground Vehicle).1 RHex-type robot may be viewed as a special case of skid-steered vehicle as their rotating C-legs are always pointed in the same direction. -
Robotics Section Guide for Web.Indd
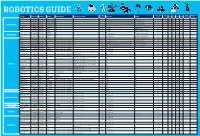
ROBOTICS GUIDE Soldering Teachers Notes Early Higher Hobby/Home The Robot Product Code Description The Brand Assembly Required Tools That May Be Helpful Devices Req Software KS1 KS2 KS3 KS4 Required Available Years Education School VEX 123! 70-6250 CLICK HERE VEX No ✘ None No ✔ ✔ ✔ ✔ Dot 70-1101 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ Dash 70-1100 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ ✔ Ready to Go Robot Cue 70-1108 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ Codey Rocky 75-0516 CLICK HERE Makeblock No ✘ PC, Laptop Free downloadb ale Mblock Software ✔ ✔ ✔ ✔ Ozobot 70-8200 CLICK HERE Ozobot No ✘ PC, Laptop Free downloads ✔ ✔ ✔ ✔ Ohbot 76-0000 CLICK HERE Ohbot No ✘ PC, Laptop Free downloads for Windows or Pi ✔ ✔ ✔ ✔ SoftBank NAO 70-8893 CLICK HERE No ✘ PC, Laptop or Ipad Choregraph - free to download ✔ ✔ ✔ ✔ ✔ ✔ ✔ Robotics Humanoid Robots SoftBank Pepper 70-8870 CLICK HERE No ✘ PC, Laptop or Ipad Choregraph - free to download ✔ ✔ ✔ ✔ ✔ ✔ ✔ Robotics Ohbot 76-0001 CLICK HERE Ohbot Assembly is part of the fun & learning! ✘ PC, Laptop Free downloads for Windows or Pi ✔ ✔ ✔ ✔ FABLE 00-0408 CLICK HERE Shape Robotics Assembly is part of the fun & learning! ✘ PC, Laptop or Ipad Free Downloadable ✔ ✔ ✔ ✔ VEX GO! 70-6311 CLICK HERE VEX Assembly is part of the fun & learning! ✘ Windows, Mac, -

Nikon Report2017
Nikon 100th Anniversary Special Feature A Look Back at Nikon’s 100-Year History of Value Creation Nikon celebrated the 100th anniversary of its founding on July 25, 2017. Nikon has evolved together with light-related technologies over the course of the past century. Driven by our abundant sense of curiosity and inquisitiveness, we have continued to unlock new possibilities that have shined light on the path to a brighter future, creating revolutionary new products along the way. We pride ourselves on the contributions we have made to changing society. Seeking to make our hopes and dreams a reality, the Nikon Group will boldly pursue innovation over the next 100 years, striving to transform the impossible of yesterday into the normal of tomorrow. We will take a look back at Nikon’s 100-year history of value creation. 1917 Three of Japan’s leading optical 1946 Pointal ophthalmic lens manufacturers merge to form is marketed a comprehensive, fully integrated Nikon’s fi rst ophthalmic lens optical company known as Nikon brand name is adopted for Nippon Kogaku K.K. small-sized cameras Pointal Oi Dai-ichi Plant (now Oi Plant) Tilting Level E and Transit G 1918 is completed 1947 surveying instruments are marketed Nikon’s fi rst surveying instruments after World War II MIKRON 4x and 6x 1921 ultra-small-prism binoculars are marketed Nikon Model I small-sized 1948 camera is marketed The fi rst binoculars developed, designed and manufactured The fi rst Nikon camera and the by Nikon fi rst product to bear the MIKRON 6x “Nikon” name Nikon Model I Model -

Fetishism and the Culture of the Automobile
FETISHISM AND THE CULTURE OF THE AUTOMOBILE James Duncan Mackintosh B.A.(hons.), Simon Fraser University, 1985 THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF ARTS in the Department of Communication Q~amesMackintosh 1990 SIMON FRASER UNIVERSITY August 1990 All rights reserved. This work may not be reproduced in whole or in part, by photocopy or other means, without permission of the author. APPROVAL NAME : James Duncan Mackintosh DEGREE : Master of Arts (Communication) TITLE OF THESIS: Fetishism and the Culture of the Automobile EXAMINING COMMITTEE: Chairman : Dr. William D. Richards, Jr. \ -1 Dr. Martih Labbu Associate Professor Senior Supervisor Dr. Alison C.M. Beale Assistant Professor \I I Dr. - Jerry Zqlove, Associate Professor, Department of ~n~lish, External Examiner DATE APPROVED : 20 August 1990 PARTIAL COPYRIGHT LICENCE I hereby grant to Simon Fraser University the right to lend my thesis or dissertation (the title of which is shown below) to users of the Simon Fraser University Library, and to make partial or single copies only for such users or in response to a request from the library of any other university, or other educational institution, on its own behalf or for one of its users. I further agree that permission for multiple copying of this thesis for scholarly purposes may be granted by me or the Dean of Graduate Studies. It is understood that copying or publication of this thesis for financial gain shall not be allowed without my written permission. Title of Thesis/Dissertation: Fetishism and the Culture of the Automobile. Author : -re James Duncan Mackintosh name 20 August 1990 date ABSTRACT This thesis explores the notion of fetishism as an appropriate instrument of cultural criticism to investigate the rites and rituals surrounding the automobile. -
A Field Guide to Bulkhead Connectors for Aquatica Digital Camera Housing: a Field Guide to Aquatica’S Strobe Connectors
A field guide to bulkhead connectors for Aquatica digital camera housing: A Field Guide to Aquatica’s strobe connectors This comprehensive guide is to help Aquatica users in selecting the proper strobe connectors for their housing it is divided in sec- tions addressing the various generation and brand for which we have manufactured housing for over the years. Please make sure to visit our website www.aquatica.ca for updated version of this document. Section 1: The classic Nikon type. These are found in the following legacy Aquatica housings for these cameras; Fuji S2 Pro Fuji S5 (same as Nikon D200) Nikon D2x Nikon D3 / D3x (not the D3s version) Nikon D40 / D40x / D60 Nikon D70 /D70s Nikon D80 Nikon D100 Nikon D200 Nikon D300 (not the D300s) Section 2: The newer Nikon type. These modular connectors have an internal switchboard and separate hot shoe and are found in the following new generation Aquatica housings for these cameras; Nikon D3s (not the older D3/D3x version) Nikon D90 Nikon D300s Nikon D700 Section 3: The Classic Canon type. These are found in the following legacy Aquatica housings for these cameras; Canon 1Ds Mk III & 1D Mk IV Canon 5D (not 5D Mk II) Canon 30D Canon 40D / 50D Canon Digital Rebel / 300D Section 4: The newer Canon type. These modular connectors have an internal switchboard and separate hot shoe and are found in the following new generation Aquatica housings for these cameras; Canon 5D Mk II (not the original 5D) Canon 7D Canon Digital Rebel T2i / 550D Section 5: The optical type. -

Towards Autonomous Localization of an Underwater Drone
TOWARDS AUTONOMOUS LOCALIZATION OF AN UNDERWATER DRONE A Thesis presented to the Faculty of California Polytechnic State University, San Luis Obispo In Partial Fulfillment of the Requirements for the Degree Master of Science in Computer Science by Nathan Sfard June 2018 c 2018 Nathan Sfard ALL RIGHTS RESERVED ii COMMITTEE MEMBERSHIP TITLE: Towards Autonomous Localization of an Underwater Drone AUTHOR: Nathan Sfard DATE SUBMITTED: June 2018 COMMITTEE CHAIR: Lynne Slivovsky, Ph.D. Professor of Computer Engineering COMMITTEE MEMBER: John Seng, Ph.D. Professor of Computer Science COMMITTEE MEMBER: Xiao-Hua Yu, Ph.D. Professor of Electrical Engineering iii ABSTRACT Towards Autonomous Localization of an Underwater Drone Nathan Sfard Autonomous vehicle navigation is a complex and challenging task. Land and aerial vehicles often use highly accurate GPS sensors to localize themselves in their envi- ronments. These sensors are ineffective in underwater environments due to signal attenuation. Autonomous underwater vehicles utilize one or more of the following approaches for successful localization and navigation: inertial/dead-reckoning, acous- tic signals, and geophysical data. This thesis examines autonomous localization in a simulated environment for an OpenROV Underwater Drone using a Kalman Fil- ter. This filter performs state estimation for a dead reckoning system exhibiting an additive error in location measurements. We evaluate the accuracy of this Kalman Filter by analyzing the effect each parameter has on accuracy, then choosing the best combination of parameter values to assess the overall accuracy of the Kalman Filter. We find that the two parameters with the greatest effects on the system are the con- stant acceleration and the measurement uncertainty of the system. -

Modeling and Simulation of Motion of an Underwater Robot
2016 International Symposium on Nonlinear Theory and Its Applications, NOLTA2016, Yugawara, Japan, November 27th-30th, 2016 Modeling and Simulation of Motion of an Underwater Robot Ryo Inoharay, Kaito Isogaiy, Hideo Nakanoz, and Hideaki Okazakiy yGraduate School of Engineering, Shonan Institute of Technology 1–1–25, Tsujidounishikaigan, Fujisawa-shi, Kanagawa Prefecture 251-8511, Japan zFaculty of Engineering, Shonan Institute of Technology 1–1–25, Tsujidounishikaigan, Fujisawa-shi, Kanagawa Prefecture 251-8511, Japan Email: [email protected], [email protected], [email protected], [email protected] Abstract—This paper presents how system dynamics ics [1] of an underwater robot based on [2], [4]. The time and system control equations for an underwater robot were parameter t for all the stated variables, such as r(t), or Ω(t), derived using an Arnold-type operator to control the Open- etc., is omitted for convenience. We use the following no- ROV. Typical behavior of the OpenROV on MATLAB nu- tation as [2] (Fig 2): merical simulations is illustrated. ei 2 w (i = 1; 2; 3) are the base vectors of a right-handed Cartesian stationary coordinate system at the origin O; 2 = ; ; 1. Introduction Ei W (i 1 2 3) are the base vectors of a right moving coordinate system connected to the body at the center of Although there are several designs, control system equa- the mass Oc. tions, and dynamic equations for underwater robots, such as [1], unified methods to describe the dynamic equations Definition 1 Let w and W be oriented euclidean spaces for the rigid body kinetics of an underwater robot have yet (i.e. -

Digital Camera Fully Compatible, Newly Developed S-TTL System
Digital Camera Fully Compatible, Newly Developed S-TTL System "S-TTL" enables TTL auto shooting by an external strobe for a digital SLR camera as well as for a point & shoot digital camera. INON S-TTL auto strobe supports any manufactures' model providing highly accurate exposure control. Film camera era without strobe selection problem TTL stands for "Through The Lens" and TTL auto strobe system controls flash amount to provide correct exposure based on calculation by camera's internal sensor metering reflecting strobe light from a subject through the lens. This TTL system meters actual light amount reflecting from a subject providing accurate exposure. When we start with the history of underwater TTL auto strobe, underwater camera "NIKONOS V" released in 1984 was the first to provide automatic TTL flash control for underwater strobe SB-102, SB-103 succeeded by NIKONOS V compatible underwater strobes form other manufactures. The 5 pin electrical sync connector for NIKONOS V is most popular and widely adopted to connect an underwater strobe and underwater film camera (underwater camera / housing). A film SLR camera has flexibility to select an underwater strobe. As far as housing has NIKONOS type electrical sync connector and properly NIKONOS type 5 pin electrical wired, automatic TTL flash control is usable with any TTL auto strobe sync connector and NIKONOS V like Nikon SB-105, INON Z-220, Z-22 connected via electrical sync with INON Z-22 strobe cable. Film camera compatible strobe is not usable for a digital camera!? Underwater TTL strobe circumstances have been drastically altered with the spread of digital camera among divers. -

Development of an Underwater Robot
School of Science & Engineering Capstone Design Development of an Underwater Robot Oumaima Lamaakel Supervised by Dr. Kevin Scott Smith Submitted in partial fulfillment of the requirements for the degree of Bachelor of Science in General Engineering Spring 2018 2 DEVELOPMENT OF AN UNDERWATER ROBOT FOR MUD SAMPLES PICK UP Capstone Report Student Statement: The work submitted is solely prepared by Oumaima Lamaakel and it is original. Excerpts from other’s work have been clearly identified, acknowledged and listed in the list of references. The engineering drawings, computer programs, prototype development, and testing protocols reported in this document are also original and adhere to the engineering design ethics and safety measures. ______________________ Oumaima Lamaakel Approved by the supervisor: ______________________ Dr. Kevin Scott Smith 3 Acknowledgment I am highly indebted to my supervisors prof. Kevin Smith and prof. Lorraine Casazza for their guidance, constant supervision and support throughouts the whole year. I would like to express my gratitude to prof Veronique Van Lierde for helping understand the kinematics behind manipulators, prof. Asmae Khaldoun for her feedback regarding materials selection, prof. Yassine Salih Alj for his support and coordination work, the lab technician Mr Abderahim Boulakrouch, and Al Akhawayn University and the School of Science & Engineering for giving me the opportunity to pursue this project. My gratitude extends to the members of the ROV team, who helped me assemble the prototypes, especially Jade El Haimer for his invaluable help. I would also like to thank my dear family, friends for their support throughout my undergraduate education. 4 List of Tables and Figures Table 2 Comparison of Thrusters ........................................................................................... -

Dynamic Reconfiguration of Mission Parameters in Underwater Human
Dynamic Reconfiguration of Mission Parameters in Underwater Human-Robot Collaboration Md Jahidul Islam1, Marc Ho2, and Junaed Sattar3 Abstract— This paper presents a real-time programming and in the underwater domain, what would otherwise be straight- parameter reconfiguration method for autonomous underwater forward deployments in terrestrial settings often become ex- robots in human-robot collaborative tasks. Using a set of tremely complex undertakings for underwater robots, which intuitive and meaningful hand gestures, we develop a syntacti- cally simple framework that is computationally more efficient require close human supervision. Since Wi-Fi or radio (i.e., than a complex, grammar-based approach. In the proposed electromagnetic) communication is not available or severely framework, a convolutional neural network is trained to provide degraded underwater [7], such methods cannot be used accurate hand gesture recognition; subsequently, a finite-state to instruct an AUV to dynamically reconfigure command machine-based deterministic model performs efficient gesture- parameters. The current task thus needs to be interrupted, to-instruction mapping and further improves robustness of the interaction scheme. The key aspect of this framework is and the robot needs to be brought to the surface in order that it can be easily adopted by divers for communicating to reconfigure its parameters. This is inconvenient and often simple instructions to underwater robots without using artificial expensive in terms of time and physical resources. Therefore, tags such as fiducial markers or requiring memorization of a triggering parameter changes based on human input while the potentially complex set of language rules. Extensive experiments robot is underwater, without requiring a trip to the surface, are performed both on field-trial data and through simulation, which demonstrate the robustness, efficiency, and portability of is a simpler and more efficient alternative approach. -

Assessment of Couple Unmanned Aerial Vehicle-Portable Magnetic
International Journal of Scientific & Engineering Research Volume 11, Issue 1, January-2020 1271 ISSN 2229-5518 Assessment of Couple Unmanned Aerial Vehicle- Portable Magnetic Resonance Imaging Sensor for Precision Agriculture of Crops Balogun Wasiu A., Keshinro K.K, Momoh-Jimoh E. Salami, Adegoke A. S., Adesanya G. E., Obadare Bolatito J Abstract— This paper proposes an improved benefits of integration of Unmanned Aerial vehicle (UAV) and Portable Magnetic Resonance Imaging (PMRI) system in relation to developing Precision Agricultural (PA) that is capable of carrying out a dynamic internal quality assessment of crop developmental stages during pre-harvest period. A comprehensive review was carried out on application of UAV technology to Precision Agriculture (PA) progress and evolving research work on developing a Portable MRI system. The disadvantages of using traditional way of obtaining Precision Agricultural (PA) were shown. Proposed Model Architecture of Coupled Unmanned Aerial vehicle (UAV) and Portable Magnetic Resonance Imaging (PMRI) System were developed and the advantages of the proposed system were displayed. It is predicted that the proposed method can be useful for Precision Agriculture (PA) which will reduce the cost implication of Pre-harvest processing of farm produce based on non-destructive technique. Index Terms— Unmanned Aerial vehicle, Portable Magnetic Resonance Imaging, Precision Agricultural, Non-destructive, Pre-harvest, Crops, Imaging, Permanent magnet —————————— —————————— 1 INTRODUCTION URING agricultural processing, quality control ensure Inspection of fresh fruit bunches (FFB) for harvesting is a rig- that food products meet certain quality and safety stand- orous assignment which can be overlooked or applied physi- D ards in a developed country [FAO]. Low profits in fruit cal counting that are usually not accurate or precise (Sham- farming are subjected by pre- and post-harvest factors.