Approximating Pathwidth for Graphs of Small Treewidth
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Forbidden Subgraph Characterization of Quasi-Line Graphs Medha Dhurandhar [email protected]
Forbidden Subgraph Characterization of Quasi-line Graphs Medha Dhurandhar [email protected] Abstract: Here in particular, we give a characterization of Quasi-line Graphs in terms of forbidden induced subgraphs. In general, we prove a necessary and sufficient condition for a graph to be a union of two cliques. 1. Introduction: A graph is a quasi-line graph if for every vertex v, the set of neighbours of v is expressible as the union of two cliques. Such graphs are more general than line graphs, but less general than claw-free graphs. In [2] Chudnovsky and Seymour gave a constructive characterization of quasi-line graphs. An alternative characterization of quasi-line graphs is given in [3] stating that a graph has a fuzzy reconstruction iff it is a quasi-line graph and also in [4] using the concept of sums of Hoffman graphs. Here we characterize quasi-line graphs in terms of the forbidden induced subgraphs like line graphs. We consider in this paper only finite, simple, connected, undirected graphs. The vertex set of G is denoted by V(G), the edge set by E(G), the maximum degree of vertices in G by Δ(G), the maximum clique size by (G) and the chromatic number by G). N(u) denotes the neighbourhood of u and N(u) = N(u) + u. For further notation please refer to Harary [3]. 2. Main Result: Before proving the main result we prove some lemmas, which will be used later. Lemma 1: If G is {3K1, C5}-free, then either 1) G ~ K|V(G)| or 2) If v, w V(G) are s.t. -
Bayes Nets Conclusion Inference
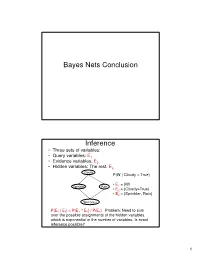
Bayes Nets Conclusion Inference • Three sets of variables: • Query variables: E1 • Evidence variables: E2 • Hidden variables: The rest, E3 Cloudy P(W | Cloudy = True) • E = {W} Sprinkler Rain 1 • E2 = {Cloudy=True} • E3 = {Sprinkler, Rain} Wet Grass P(E 1 | E 2) = P(E 1 ^ E 2) / P(E 2) Problem: Need to sum over the possible assignments of the hidden variables, which is exponential in the number of variables. Is exact inference possible? 1 A Simple Case A B C D • Suppose that we want to compute P(D = d) from this network. A Simple Case A B C D • Compute P(D = d) by summing the joint probability over all possible values of the remaining variables A, B, and C: P(D === d) === ∑∑∑ P(A === a, B === b,C === c, D === d) a,b,c 2 A Simple Case A B C D • Decompose the joint by using the fact that it is the product of terms of the form: P(X | Parents(X)) P(D === d) === ∑∑∑ P(D === d | C === c)P(C === c | B === b)P(B === b | A === a)P(A === a) a,b,c A Simple Case A B C D • We can avoid computing the sum for all possible triplets ( A,B,C) by distributing the sums inside the product P(D === d) === ∑∑∑ P(D === d | C === c)∑∑∑P(C === c | B === b)∑∑∑P(B === b| A === a)P(A === a) c b a 3 A Simple Case A B C D This term depends only on B and can be written as a 2- valued function fA(b) P(D === d) === ∑∑∑ P(D === d | C === c)∑∑∑P(C === c | B === b)∑∑∑P(B === b| A === a)P(A === a) c b a A Simple Case A B C D This term depends only on c and can be written as a 2- valued function fB(c) === === === === === === P(D d) ∑∑∑ P(D d | C c)∑∑∑P(C c | B b)f A(b) c b …. -

On Treewidth and Graph Minors
On Treewidth and Graph Minors Daniel John Harvey Submitted in total fulfilment of the requirements of the degree of Doctor of Philosophy February 2014 Department of Mathematics and Statistics The University of Melbourne Produced on archival quality paper ii Abstract Both treewidth and the Hadwiger number are key graph parameters in structural and al- gorithmic graph theory, especially in the theory of graph minors. For example, treewidth demarcates the two major cases of the Robertson and Seymour proof of Wagner's Con- jecture. Also, the Hadwiger number is the key measure of the structural complexity of a graph. In this thesis, we shall investigate these parameters on some interesting classes of graphs. The treewidth of a graph defines, in some sense, how \tree-like" the graph is. Treewidth is a key parameter in the algorithmic field of fixed-parameter tractability. In particular, on classes of bounded treewidth, certain NP-Hard problems can be solved in polynomial time. In structural graph theory, treewidth is of key interest due to its part in the stronger form of Robertson and Seymour's Graph Minor Structure Theorem. A key fact is that the treewidth of a graph is tied to the size of its largest grid minor. In fact, treewidth is tied to a large number of other graph structural parameters, which this thesis thoroughly investigates. In doing so, some of the tying functions between these results are improved. This thesis also determines exactly the treewidth of the line graph of a complete graph. This is a critical example in a recent paper of Marx, and improves on a recent result by Grohe and Marx. -

Infinitely Many Minimal Classes of Graphs of Unbounded Clique-Width∗
Infinitely many minimal classes of graphs of unbounded clique-width∗ A. Collins, J. Foniok†, N. Korpelainen, V. Lozin, V. Zamaraev Abstract The celebrated theorem of Robertson and Seymour states that in the family of minor-closed graph classes, there is a unique minimal class of graphs of unbounded tree-width, namely, the class of planar graphs. In the case of tree-width, the restriction to minor-closed classes is justified by the fact that the tree-width of a graph is never smaller than the tree-width of any of its minors. This, however, is not the case with respect to clique-width, as the clique-width of a graph can be (much) smaller than the clique-width of its minor. On the other hand, the clique-width of a graph is never smaller than the clique-width of any of its induced subgraphs, which allows us to be restricted to hereditary classes (that is, classes closed under taking induced subgraphs), when we study clique-width. Up to date, only finitely many minimal hereditary classes of graphs of unbounded clique-width have been discovered in the literature. In the present paper, we prove that the family of such classes is infinite. Moreover, we show that the same is true with respect to linear clique-width. Keywords: clique-width, linear clique-width, hereditary class 1 Introduction Clique-width is a graph parameter which is important in theoretical computer science, because many algorithmic problems that are generally NP-hard become polynomial-time solvable when restricted to graphs of bounded clique-width [4]. -

Graph Varieties Axiomatized by Semimedial, Medial, and Some Other Groupoid Identities
Discussiones Mathematicae General Algebra and Applications 40 (2020) 143–157 doi:10.7151/dmgaa.1344 GRAPH VARIETIES AXIOMATIZED BY SEMIMEDIAL, MEDIAL, AND SOME OTHER GROUPOID IDENTITIES Erkko Lehtonen Technische Universit¨at Dresden Institut f¨ur Algebra 01062 Dresden, Germany e-mail: [email protected] and Chaowat Manyuen Department of Mathematics, Faculty of Science Khon Kaen University Khon Kaen 40002, Thailand e-mail: [email protected] Abstract Directed graphs without multiple edges can be represented as algebras of type (2, 0), so-called graph algebras. A graph is said to satisfy an identity if the corresponding graph algebra does, and the set of all graphs satisfying a set of identities is called a graph variety. We describe the graph varieties axiomatized by certain groupoid identities (medial, semimedial, autodis- tributive, commutative, idempotent, unipotent, zeropotent, alternative). Keywords: graph algebra, groupoid, identities, semimediality, mediality. 2010 Mathematics Subject Classification: 05C25, 03C05. 1. Introduction Graph algebras were introduced by Shallon [10] in 1979 with the purpose of providing examples of nonfinitely based finite algebras. Let us briefly recall this concept. Given a directed graph G = (V, E) without multiple edges, the graph algebra associated with G is the algebra A(G) = (V ∪ {∞}, ◦, ∞) of type (2, 0), 144 E. Lehtonen and C. Manyuen where ∞ is an element not belonging to V and the binary operation ◦ is defined by the rule u, if (u, v) ∈ E, u ◦ v := (∞, otherwise, for all u, v ∈ V ∪ {∞}. We will denote the product u ◦ v simply by juxtaposition uv. Using this representation, we may view any algebraic property of a graph algebra as a property of the graph with which it is associated. -

Treewidth I (Algorithms and Networks)
Treewidth Algorithms and Networks Overview • Historic introduction: Series parallel graphs • Dynamic programming on trees • Dynamic programming on series parallel graphs • Treewidth • Dynamic programming on graphs of small treewidth • Finding tree decompositions 2 Treewidth Computing the Resistance With the Laws of Ohm = + 1 1 1 1789-1854 R R1 R2 = + R R1 R2 R1 R2 R1 Two resistors in series R2 Two resistors in parallel 3 Treewidth Repeated use of the rules 6 6 5 2 2 1 7 Has resistance 4 1/6 + 1/2 = 1/(1.5) 1.5 + 1.5 + 5 = 8 1 + 7 = 8 1/8 + 1/8 = 1/4 4 Treewidth 5 6 6 5 2 2 1 7 A tree structure tree A 5 6 P S 2 P 6 P 2 7 S Treewidth 1 Carry on! • Internal structure of 6 6 5 graph can be forgotten 2 2 once we know essential information 1 7 about it! 4 ¼ + ¼ = ½ 6 Treewidth Using tree structures for solving hard problems on graphs 1 • Network is ‘series parallel graph’ • 196*, 197*: many problems that are hard for general graphs are easy for e.g.: – Trees NP-complete – Series parallel graphs • Many well-known problems Linear / polynomial time computable 7 Treewidth Weighted Independent Set • Independent set: set of vertices that are pair wise non-adjacent. • Weighted independent set – Given: Graph G=(V,E), weight w(v) for each vertex v. – Question: What is the maximum total weight of an independent set in G? • NP-complete 8 Treewidth Weighted Independent Set on Trees • On trees, this problem can be solved in linear time with dynamic programming. -

Counting Independent Sets in Graphs with Bounded Bipartite Pathwidth∗
Counting independent sets in graphs with bounded bipartite pathwidth∗ Martin Dyery Catherine Greenhillz School of Computing School of Mathematics and Statistics University of Leeds UNSW Sydney, NSW 2052 Leeds LS2 9JT, UK Australia [email protected] [email protected] Haiko M¨uller∗ School of Computing University of Leeds Leeds LS2 9JT, UK [email protected] 7 August 2019 Abstract We show that a simple Markov chain, the Glauber dynamics, can efficiently sample independent sets almost uniformly at random in polynomial time for graphs in a certain class. The class is determined by boundedness of a new graph parameter called bipartite pathwidth. This result, which we prove for the more general hardcore distribution with fugacity λ, can be viewed as a strong generalisation of Jerrum and Sinclair's work on approximately counting matchings, that is, independent sets in line graphs. The class of graphs with bounded bipartite pathwidth includes claw-free graphs, which generalise line graphs. We consider two further generalisations of claw-free graphs and prove that these classes have bounded bipartite pathwidth. We also show how to extend all our results to polynomially-bounded vertex weights. 1 Introduction There is a well-known bijection between matchings of a graph G and independent sets in the line graph of G. We will show that we can approximate the number of independent sets ∗A preliminary version of this paper appeared as [19]. yResearch supported by EPSRC grant EP/S016562/1 \Sampling in hereditary classes". zResearch supported by Australian Research Council grant DP190100977. 1 in graphs for which all bipartite induced subgraphs are well structured, in a sense that we will define precisely. -

General Approach to Line Graphs of Graphs 1
DEMONSTRATIO MATHEMATICA Vol. XVII! No 2 1985 Antoni Marczyk, Zdzislaw Skupien GENERAL APPROACH TO LINE GRAPHS OF GRAPHS 1. Introduction A unified approach to the notion of a line graph of general graphs is adopted and proofs of theorems announced in [6] are presented. Those theorems characterize five different types of line graphs. Both Krausz-type and forbidden induced sub- graph characterizations are provided. So far other authors introduced and dealt with single spe- cial notions of a line graph of graphs possibly belonging to a special subclass of graphs. In particular, the notion of a simple line graph of a simple graph is implied by a paper of Whitney (1932). Since then it has been repeatedly introduc- ed, rediscovered and generalized by many authors, among them are Krausz (1943), Izbicki (1960$ a special line graph of a general graph), Sabidussi (1961) a simple line graph of a loop-free graph), Menon (1967} adjoint graph of a general graph) and Schwartz (1969; interchange graph which coincides with our line graph defined below). In this paper we follow another way, originated in our previous work [6]. Namely, we distinguish special subclasses of general graphs and consider five different types of line graphs each of which is defined in a natural way. Note that a similar approach to the notion of a line graph of hypergraphs can be adopted. We consider here the following line graphsi line graphs, loop-free line graphs, simple line graphs, as well as augmented line graphs and augmented loop-free line graphs. - 447 - 2 A. Marczyk, Z. -

Randomly Coloring Graphs of Logarithmically Bounded Pathwidth Shai Vardi
Randomly coloring graphs of logarithmically bounded pathwidth Shai Vardi To cite this version: Shai Vardi. Randomly coloring graphs of logarithmically bounded pathwidth. 2018. hal-01832102 HAL Id: hal-01832102 https://hal.archives-ouvertes.fr/hal-01832102 Preprint submitted on 6 Jul 2018 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Randomly coloring graphs of logarithmically bounded pathwidth Shai Vardi∗ Abstract We consider the problem of sampling a proper k-coloring of a graph of maximal degree ∆ uniformly at random. We describe a new Markov chain for sampling colorings, and show that it mixes rapidly on graphs of logarithmically bounded pathwidth if k ≥ (1 + )∆, for any > 0, using a new hybrid paths argument. ∗California Institute of Technology, Pasadena, CA, 91125, USA. E-mail: [email protected]. 1 Introduction A (proper) k-coloring of a graph G = (V; E) is an assignment σ : V ! f1; : : : ; kg such that neighboring vertices have different colors. We consider the problem of sampling (almost) uniformly at random from the space of all k-colorings of a graph.1 The problem has received considerable attention from the computer science community in recent years, e.g., [12, 17, 24, 26, 33, 44, 45]. -

Tree Structures
Tree Structures Definitions: o A tree is a connected acyclic graph. o A disconnected acyclic graph is called a forest o A tree is a connected digraph with these properties: . There is exactly one node (Root) with in-degree=0 . All other nodes have in-degree=1 . A leaf is a node with out-degree=0 . There is exactly one path from the root to any leaf o The degree of a tree is the maximum out-degree of the nodes in the tree. o If (X,Y) is a path: X is an ancestor of Y, and Y is a descendant of X. Root X Y CSci 1112 – Algorithms and Data Structures, A. Bellaachia Page 1 Level of a node: Level 0 or 1 1 or 2 2 or 3 3 or 4 Height or depth: o The depth of a node is the number of edges from the root to the node. o The root node has depth zero o The height of a node is the number of edges from the node to the deepest leaf. o The height of a tree is a height of the root. o The height of the root is the height of the tree o Leaf nodes have height zero o A tree with only a single node (hence both a root and leaf) has depth and height zero. o An empty tree (tree with no nodes) has depth and height −1. o It is the maximum level of any node in the tree. CSci 1112 – Algorithms and Data Structures, A. -

A Simple Linear-Time Algorithm for Finding Path-Decompostions of Small Width
Introduction Preliminary Definitions Pathwidth Algorithm Summary A Simple Linear-Time Algorithm for Finding Path-Decompostions of Small Width Kevin Cattell Michael J. Dinneen Michael R. Fellows Department of Computer Science University of Victoria Victoria, B.C. Canada V8W 3P6 Information Processing Letters 57 (1996) 197–203 Kevin Cattell, Michael J. Dinneen, Michael R. Fellows Linear-Time Path-Decomposition Algorithm Introduction Preliminary Definitions Pathwidth Algorithm Summary Outline 1 Introduction Motivation History 2 Preliminary Definitions Boundaried graphs Path-decompositions Topological tree obstructions 3 Pathwidth Algorithm Main result Linear-time algorithm Proof of correctness Other results Kevin Cattell, Michael J. Dinneen, Michael R. Fellows Linear-Time Path-Decomposition Algorithm Introduction Preliminary Definitions Motivation Pathwidth Algorithm History Summary Motivation Pathwidth is related to several VLSI layout problems: vertex separation link gate matrix layout edge search number ... Usefullness of bounded treewidth in: study of graph minors (Robertson and Seymour) input restrictions for many NP-complete problems (fixed-parameter complexity) Kevin Cattell, Michael J. Dinneen, Michael R. Fellows Linear-Time Path-Decomposition Algorithm Introduction Preliminary Definitions Motivation Pathwidth Algorithm History Summary History General problem(s) is NP-complete Input: Graph G, integer t Question: Is tree/path-width(G) ≤ t? Algorithmic development (fixed t): O(n2) nonconstructive treewidth algorithm by Robertson and Seymour (1986) O(nt+2) treewidth algorithm due to Arnberg, Corneil and Proskurowski (1987) O(n log n) treewidth algorithm due to Reed (1992) 2 O(2t n) treewidth algorithm due to Bodlaender (1993) O(n log2 n) pathwidth algorithm due to Ellis, Sudborough and Turner (1994) Kevin Cattell, Michael J. Dinneen, Michael R. -

Minimal Acyclic Forbidden Minors for the Family of Graphs with Bounded Path-Width
Discrete Mathematics 127 (1994) 293-304 293 North-Holland Minimal acyclic forbidden minors for the family of graphs with bounded path-width Atsushi Takahashi, Shuichi Ueno and Yoji Kajitani Department of Electrical and Electronic Engineering, Tokyo Institute of Technology. Tokyo, 152. Japan Received 27 November 1990 Revised 12 February 1992 Abstract The graphs with bounded path-width, introduced by Robertson and Seymour, and the graphs with bounded proper-path-width, introduced in this paper, are investigated. These families of graphs are minor-closed. We characterize the minimal acyclic forbidden minors for these families of graphs. We also give estimates for the numbers of minimal forbidden minors and for the numbers of vertices of the largest minimal forbidden minors for these families of graphs. 1. Introduction Graphs we consider are finite and undirected, but may have loops and multiple edges unless otherwise specified. A graph H is a minor of a graph G if H is isomorphic to a graph obtained from a subgraph of G by contracting edges. A family 9 of graphs is said to be minor-closed if the following condition holds: If GEB and H is a minor of G then H EF. A graph G is a minimal forbidden minor for a minor-closed family F of graphs if G#8 and any proper minor of G is in 9. Robertson and Seymour proved the following deep theorems. Theorem 1.1 (Robertson and Seymour [15]). Every minor-closed family of graphs has a finite number of minimal forbidden minors. Theorem 1.2 (Robertson and Seymour [14]).