Chapter 4 Venus Unmasked
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Planetary Data Workshop
NASA Conference Publication 2343 NASA-CP-2343-PT-I 19840026295 Part 1 Planetary Data Workshop Proceedings of a workshop held at Goddard Space Flight Center Greenbelt,. Maryland November 29-December 1, 1983 NI_A NASA Conference Publication 2343 Part 1 Planetary Data Workshop Hugh H. Kieffer, Chairman NASA Office of Space Science and Applications Washington, D.C. Proceedings of a workshop held at Goddard Space Hight Center Greenbelt, Maryland November 29-December l, 1983 N/_A National Aeronautics and Space Administration ScientificandTechnical Information Branch 1984 Contributing Authors Hugh Kieffer U.S. Geological Survey Raymond E. Arvidson Washington University William A° Baum Lowell Observatory Larry Bolef Washington University Larry H. Brace Goddard Space Flight Center Roger N. Clark University of Colorado Randal Davis University of Colorado Richard Elphic University of California - Los Angeles John Pearl Goddard Space Flight Center Chris Russell University of California - Los Angeles Stephen R. Saunders Jet Propulsion Laboratory Richard A. Simpson Stanford University William Smythe Jet Propulsion Laboratory Laurence A. Soderblom California Institute of Technology I. A. Stewart University of Colorado R. J. Walker University of California - Los Angeles Charles Acton Jet Propulsion Laboratory Isadore Adler University of Maryland Joseph K. Alexander Goddard Space Flight Center Donald E. Anderson Naval Research Laboratory Donald L. Anderson Arizona State University John Anderson Jet Propulsion Laboratory Daniel Baker Los Alamos National Laboratory Edwin S. Barker McDonald Observatory Reta F. Beebe New Mexico State University Jay T. Bergstralh Jet Propulsion Laboratory Michael L. Bielefield Space Telescope Science Institute A. Lyle Broadfoot University of Arizona James Brown Donald B. Campbell Arecibo Observatory G. -
Venus Global Radar Roughness: a Preliminary Analysis
VENUS GLOBAL RADAR ROUGHNESS: A PRELIMINARY ANALYSIS. James B. Garvin, James W. Head, Dept. of Geol. Sci., Brown Univ., Providence, RI 02912, Stanley Zisk, Haystack Observatory, Westford, MA 01886, and Gordon Pettengill, Dept. Earth and Planet. Sci., Mass. Inst. of Tech., Cambridge, MA 02139. The Pioneer orbiter radar instrument obtained data for over 93% of the surface of Venus and from these data, three properties of the surface could be derived: 1) elevation, 2) reflectivity, and 3) surface roughness (1-3). The roughness of a planetary surface can be an important measure of the type and . variety of geologic processes operating to form and modify the planet. Local and regional variations can indicate areaspresently undergoing active erosion. In regions where image resolution is low, roughness data can aid in the inter- pretation of geologic structures (1-9). In order to provide a framework for the interpretation of local and regional roughness data, we have analyzed the global roughness data set. The purpose of this paper is to report on a quan- titati ve correlation of gl obal radar roughness and elevation. The PV radar altimeter data give a statistical measure of the angular distribution of scatterers or facets in the 0.1-10 m range. Roughness can be described in terms of the Hagfors C-factor (C), a dimensionless parameter which is related to rms slope in degrees by: rms slope = 180/~r&. The alti- meter data set consists of approximately 200,000 surface radar measurements. As previously described (3) these are fitted to 16 Hagfors C-factor templates to derive the first estimate of C-factor. -

Early Planetary Radar Observations at Arecibo by Gordon H
Early Planetary Radar Observations at Arecibo by Gordon H. Pettengill With its 1000-ft, zenith-oriented reflector, the newly dedicated Arecibo Observatory in late 1963 promised over 100 times the radar sensitivity of other research radar systems of the time. While radar observations of Venus had been reported in the several years preceding, they were limited to simple detections of echoes at closest approach only; Arecibo was capable of seeing not only Venus over almost its entire orbit, but Mars and Mercury as well (see Fig. 1). Fig. 1. Path Loss and Delay of Planetary Radar Echoes But, of course, the limited sky coverage afforded by Arecibo’s zenith orientation meant that we had to wait till mid-February 1964 to see the inner planet Venus, and even later to detect echoes from Mercury. But when they came in, they were strong! It took many hours of accumulating weak echo data before MIT’s Millstone could claim a Venus detection, whereas we could see strong echoes from individual radar pulses at Arecibo on our first try on Feb 10, 1964. Venus observations were used for improving its ephemeris, as well as for verifying and improving earlier determinations of the astronomical unit of distance within the solar system (see Fig.2). Fig. 2. Venus Rotation Period at Inferior Conjunction, 1964 1 Figure 3 plots the improvement in our knowledge of this important parameter (poorly determined from optical observations) that radar enabled in the early 1960’s. Fig. 3. AU Determinations 1961-1966 Perhaps the most important of these early radar observations at Arecibo involved Mercury, which by April, 1965, had moved high enough in the sky at inferior conjunction to allow observation of the delay-Doppler distribution in its echoes – sufficient to infer its apparent rotation (see Fig.4). -

MAR 14 1993 Achies
THE PHYSICAL AND CHEMICAL PROPERTIES OF THE SURFACE OF VENUS by Stewart David Nozette B.S. The University of Arizona (1979) SUBMITTED TO THE DEPARTMENT OF EARTH AND PLANETARY SCIENCES IN PARTIAL FULFILLMENT OF THE REQUIREMENTS OF THE DEGREE OF DOCTOR OF PHILOSOPHY AT THE MASSACHUSETTS INSTITUTE OF TECHNOLOGY November 1982 @ MASSACHUSETTS INSTITUTE OF TECHNOLOGY 1982 Signature of Author .. .. D&epartment of rth and Planetary Sciences November 2, 1982 . Certified by. lJohn Lewis, Thesis Supervisor Certified by. ordon Pettengill, Th is Supervisor Accepted by . Ted Madden Chairman, Department Committee MASSACHUSETTS INSTITUTE OF TECHNOLOSY MAR 14 1993 AchieS I IRRARIES THE PHYSICAL AND CHEMICAL PROPERTIES OF THE SURFACE OF VENUS by Stewart David Nozette Submitted to the Department of Earth and Planetary Sciences on November 2, 1982, in Partial Fulfillment of the Requirements of the Degree of Doctor of Philosophy ABSTRACT Exoerimental studies of aeolian transport on Venus, using a scale-modeling technique, indicate that observed surface winds are sufficient to move sedimentary particles of about 0.3 mm or less in diameter. Measurements of radar reflectivity indicate that portions of the surface are covered by material with low bulk density, possibly wind-blown sediments. Transport of chemically weathered material by wind may also affect the local composition of the lower atmosphere. The buffering of atmospheric gases in some regions of the surface is only Possible for a restricted mineral assemblage. Radar determination of the surface dielectric constant by the Pioneer Venus radar mapper for at least one area of the surface, Theia Mons, suggests that the surface contains conductive material, probably iron sulfides. -

50 Years of Arecibo Lunar Radar Mapping
INTERNATIONAL UNION UNION OF RADIO-SCIENTIFIQUE RADIO SCIENCE INTERNATIONALE ISSN 1024-4530 Bulletin No 357 June 2016 Radio Science URSI, c/o Ghent University (INTEC) St.-Pietersnieuwstraat 41, B-9000 Gent (Belgium) Contents Radio Science Bulletin Staff ....................................................................................... 3 URSI Offi cers and Secretariat.................................................................................... 6 Editor’s Comments ..................................................................................................... 8 URSI 2017 GASS....................................................................................................... 10 Awards for Young Scientists - Conditions ............................................................... 11 Modifi cation of the Ionosphere by Precursors of Strong Earthquakes ............... 12 50 Years of Arecibo Lunar Radar Mapping ........................................................... 23 Special Section: Joint URSI BeNeLux - IEEE AP-S -NARF Symposium ........... 36 Implementation of Diff erent RF-Chains to Drive Acousto-Optical Tunable Filters in the Framework of an ESA Space Mission .......................................... 37 JS’17 ........................................................................................................................... 44 In Memoriam: Per-Simon Kildal ............................................................................. 45 In Memoriam: Richard Davis ................................................................................. -
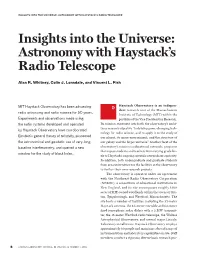
Insights Into the Universe: Astronomy with Haystack's Radio Telescope
INSIGHTS INTO THE UNIVERSE: ASTRONOMY WITH HAYSTACK’S RADIO TELESCOPE Insights into the Universe: Astronomy with Haystack’s Radio Telescope Alan R. Whitney, Colin J. Lonsdale, and Vincent L. Fish MIT Haystack Observatory has been advancing Haystack Observatory is an indepen- » dent research unit of the Massachusetts radio astronomy and radio science for 50 years. Institute of Technology (MIT) within the Experiments and observations made using portfolio of the Vice President for Research. the radio systems developed and operated Its mission statement sets forth the observatory’s ambi- tious research objective “to develop game-changing tech- by Haystack Observatory have corroborated nology for radio science, and to apply it to the study of Einstein’s general theory of relativity, pioneered our planet, its space environment, and the structure of the astronomical and geodetic use of very-long- our galaxy and the larger universe.” Another facet of the baseline interferometry, and opened a new observatory’s mission is educational outreach; programs that expose students and teachers from varying grade lev- window for the study of black holes. els to Haystack’s ongoing scientific research are a priority. In addition, both undergraduate and graduate students from area universities use the facilities at the observatory to further their own research projects. The observatory is operated under an agreement with the Northeast Radio Observatory Corporation (NEROC), a consortium of educational institutions in New England, and its site encompasses roughly 1300 acres of MIT-owned woodlands within the towns of Gro- ton, Tyngsborough, and Westford, Massachusetts. The site hosts a number of facilities, including the 37-meter Haystack antenna, the 46-meter steerable and 63-meter fixed ionospheric radar dishes with a 2 MW transmit- ter, the 18-meter Westford radio telescope, the Wallace Astrophysical Observatory, and several major Lincoln Laboratory installations. -

2003 Medals & Awards Rip Rapp Archaeological Geology
2003 MEDALS & AWARDS RIP RAPP fluvial response to Holocene bioclimatic Under his editorship Gearchaeology: change in the world. Rolfe has masterfully An International Journal has emerged ARCHAEOLOGICAL blended archaeological geology studies as the premiere professional journal of GEOLOGY AWARD from a large number of cultural resource geoarchaeology. Rolfe’s untiring work with management investigations to develop a authors and lobbying for special issues Presented to Rolfe D. Mandel framework for understanding the impact focusing on topics in the forefront of the of geologic and pedologic processes on the discipline sets him apart as one of the best preservation and visibility of the central editors of today’s professional geoscience Great Plains archaeological record. In the and archaeology journals. In addition to course of this endeavor he has formed strong the journal, his editorial skills are evident interdisciplinary ties with archaeologists, in Geoarchaeology in the Great Plains, a paleoecologists, soil scientists, geographers, historical and theoretical perspective on and geologists across the region. geoarchaeological research that has been Rolfe’s long-lasting and tireless effort widely acclaimed by both archaeologists and to forge a formal relationship between GSA geologists. and the Society for American Archaeology Rolfe has been on the cutting edge and has brought about a major increase in the continues to push the frontier in his research. interest in archaeological geology and His present focus on Quaternary geology and geoarchaeology in both societies. He founded first Americans in the Great Plains promises the Geoarchaeology Interest Group of SAA, many significant discoveries and several new which now boasts 562 members and regularly chapters in the story of people’s presence sponsors symposia and field trips at the on the Plains. -
Magellan Proj·Ect Plan
J'c_,____ ..,._\ <t ~ t.tF -t. k.~ -I ~ -::! -. 0 . " . - . - - - -- - . ---- -- - -- - - - ~ ---. -- MAGELLAN PROJ·ECT PLAN . · { VENUS RADAR MAPPER ) - . ~\7} lJ ' --~- 8'J ':_ I t ' JPL D- 814 ·, ,:.-1.;~<~- / ..... -.!_ -/ PAC~FIC REGIONAL // PLtU\~ETA.RV DATA CENTER · I ("". 630-1 " Venus Radar Mapper (VRM) Project Plan November 1983 National Aeronautics and Space Administration JPL Jet Propulsion Laboratory ,..\ California Institute of Technology ' J "--· Pasadena, California JPL D-814 ,· "- ~:·' PROJECT PLAN FOR THE VENUS RADAR MAPPER (VRM) MISSION Approval of this Project Plan indicates acceptance of Project and Program responsibilities, commitment of the necessary funding by NASA Headquarters and allocation by the JPL Project Office, and commitment of the requisite facil ities and manpower by the participating NASA Centers and JPL to implement the Project as described. APPROVED BY: ~~---,----:--~--'/JI--"Jii"'f w (/. tJtv 1-lhf1 Gerpheide, Rodney A. Mills, Manager Project VRM Program Jet Propulsion Laboratory National Aeronautics and Space Administration Lew Allen, Director Jet Propulsion Laboratory for Space Science and Applications iii t i· l.! 630.,.1 -~ 0 DISTRIBUTION JPL Albee, A. L. Cal tech 170-25 Laeser, R. P. 264-443 Allen, L. 180-904 Lavoie, s. 168-427 Baker, D. A. 156-220 LeMere, M. T. 156-ll9 Bauer, T. A. 156-246 Litty, E. c. 198-326 Berman, A. L. 506-243 Lopez, N. 233-208 Blue, J. E. (3) 161-137 Lyman, P. T. 264-800 Bollman, W. E. 264-664 Lyons, D. T. 156-248 Borden, T. 158-224 Mallis, R. K. 506-209 Burow, N. A. (3) 161-228 Mathison, R. P. 238-540 Cannova, R. -

N E W S L E T T
National Astronomy and Ionosphere Center Arecibo Observatory N MY A D IO NO NO O S R P T H S E A R E L A C N E N O I T T E A R N NEWSLETTER A R Y EC R IB TO O OBSERVA April 2004, Number 37 Photo: Jonathan Friedman and John Toohey, 2002 On Saturday, November 1, 2003 a 4- and witnessing a pulsar observation NAIC Celebrates 40th Anniversary day event kicked off with the attendance in the control room, accompanied by hat we celebrate today is the of many people closely associated with entertaining descriptions by their tour “Wscale of achievements that are the founding, building, and shaping of guides. Following the tours, and during possible when creative people, nurturing what is still the world’s largest and most a heavy rainstorm, the attendees gathered institutions, governments and supportive sensitive radio telescope. In addition, in the Ángel Ramos Visitor Center for citizens work together in common pur- invitees from local and state government the anniversary ceremony. Later, with pose.” These words of the NAIC Direc- and from the Cornell Club of Puerto Rico the telescope shrouded in mist, they tor, Robert Brown captured the sentiment joined the observatory scientific staff for assembled on the viewing platform for of the 40th anniversary celebration of the the festivities. The visitors toured the a cocktail party. Arecibo Obsevatory. site, inspecting the edge of the dish The culmination of the ceremony was the keynote address by Arecibo Obser- vatory founder Dr. William E. Gordon, entitled “The Arecibo Story.” INDEX NAIC Celebrates 40th Anniversary 1 State of the Observatory .................. -

Magellan (Formerly VRM) Update According to the Previously Agreed to Warren W
rEESti42 INTEBESZLC IN ?HE EXEFCLAXION CE VENUS, NC. 8, 24 EAhCE 1EE6 Eagfllan update (Jet EroFulsicn Lab.) 14 F CSCL 0313 unc 1d s G3/91 440QO t Magellan (Formerly VRM) Update according to the previously agreed to Warren W. James schedule, but has taken action to start the procurement of the long-lead items needed Challenger Accident Impact on Magellan to replace this hardware so that Galileo will not be left without its spares. The launch accident which destroyed the Space Shuttle Challenger on January 28, A New Name for VRM 1986 is having major adverse impacts on all of the payloads that were scheduled to fly Following a two year on the Space Shuttle during this decade, decision-making process at NASA including Magellan (which was formerly Headquarters, a new name has been selected called Venus Radar Mapper). Launch delays for the Venus Radar Mapper (VRM) project. for the projects that were to precede us, The new name is Magellan and we will use i and a reduced number of Space Shuttles, MGN as its abbreviation. This name is .-.a*, WIII itsuii in increasea competition for consistent with NASA’s general plan of Shuttle launch services. naming major planetary missions after We do not presently know if we will famous historical persons; such ns be able to obtain a place on the Space scientists, astronomers, and explorers. i Shuttle manifest for our planned launch Magellan was deemed an appropriate name date in 1988. This is a question that for VRM because it connotes exploration, cannot be answered until the cause of the discovery and circumnavigation. -
NSHP News 5/5/21, 11:41 PM
NSHP News 5/5/21, 11:41 PM Subscribe Past Issues Translate RSS View this email in your browser http://www.hispanicphysicists.org/ Year 24 January 6, 2021 In Memoriam: Mario Molina Last December 14, 2020, an event was organized at Colegio Nacional, Mexico, dedicated to the memory of Mario Molina, who passed away last October 2020. A Mexican-born scientist that received the Nobel Prize in Chemistry for his work on the harmful effect of CFCs, 1995. Mario Molina held research and teaching positions at U. of California Irvine, the Jet Propulsion Lab at Caltech, the Massachusetts Institute of Technology, among other well-known institutions. Mario Molina, 2011, Source: Wikipedia https://mailchi.mp/0f446e54b80d/b4d8f1ooym-8058946?e=829c5ce4d9 Page 1 of 17 NSHP News 5/5/21, 11:41 PM El Castillo, Chichen Itza, Mexico. Source: Wikipedia. State-of-the-Art Technology to Explore El Castillo Pyramid in Mexico Chicago State University’s (CSU) Physics Department is leading research in cutting-edge technology along with Dominican University (DU) through a grant from the National Science Foundation (NSF) to map archaeological pyramid structures in Mexico. The four-year grant also allows CSU, a U.S. Department of Education designated Predominantly Black Institution, to join forces with DU, a Hispanic- serving University, in increasing the number of underrepresented students in STEM disciplines and research. One of the members of the research team is Edmundo Garcia-Solis--NSHP board member—together with Austin Harton, both from Chicago State U. They will work with Dr. Joseph Sagerer, Senior Physics Lecturer at DU; Dr. -
Solar System Litho! IS~~SOIII\3 for Earth and Space Science
Educational Product EaTeachers Grades K-12 NASA-EP-33 8 Solar System Litho! IS~~SOIII\3 for Earth and Space Science This set contains the following materials: Our Star-The Sun Mercury Venus Earth Moon Mars Jupiter Saturn Uranus Neptune Pluto Asteroids: Ida with Moon and Gaspra (Inset) NASA Resources for Educators Electronic Resources for Educators National Aeronautics and Our Star - The Sun @ Space Administration Our Star The Sun 7 National Aeronautics and - Space Administration v The Sun is a huge, bright sphere of mostly ionized gas the Sun. Temperature steadily increases with altitude degrees K. The process that heats the corona is.very about 5billionyears old. The closest star to Earth, it is 16 up to 50,000 K, while density drops to 100,000 times mysterious and poorly understood, since the laws of million km distant (this distance is called an Astronomi- less than in the photosphere. Above thechromosphere thermodynamics state that heat energy flows from a cal Unit). The next closest star is 300,000 times further lies the corora ("crown"), extending outward from the hotter to a cooler place. Mysterious phenomena, such away. There are probably millions of similar stars in the Sun in the form of the "solar wind" to the edge of the as this, are studied by researchers in NASA's Space Milky Way galaxy (and even more galaxies in the Uni- solar system. The corora is extremely hot -millions of Physics Division. vem), but the Sun is the most important to us because it supports life on Earth. It powers photosynthesis in green plants and is ultimately the source of all food and fossil fuel.