High-End-Developments Within the Framework of Dynamic-Endoscopic Viewing of Models
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Download Paper
THE CONSTRUCTED IMAGE 531 depicted shadow. Or if a particular edge reluctantly, students eventually bow to the seems weak, she can thicken it slightly. Or authority of the rendering engine, and visual consider the reflectivity of a polished surface. literacy stalls. It would normally be added after other effects are laid down. In this way architects make A craftsman who specializes in rough adjustments that are not only local, but build carpentry never develops the sensitivity gradually. In contrast, they cannot alter a needed for finish work. The same is true for computer rendering until the calculation is students who do not practice the scrutiny complete. They see only the finished depiction needed for compositional control. When - the summative effect of all visual attributes. students see images as wholes and adjust them indirectly by means of global variables, Although some compositional adjustments can they lose the opportunity to develop a be made after the fact in image-editing discerning eye. software, such opportunities are limited. It is difficult to selectively darken and lighten A tool exclusively designed to depict cannot shadow regions, for instance, because it is much help a student learn to compose, and difficult to isolate them. Because the RGB therefore principles of composition cannot be color value of each pixel is the sum of all taken for granted when teaching computer visual effects operating on it, it is an rendering. The process of computer rendering, indivisible unit that cannot be adequately when conducted in the conventional manner, distilled after-the-fact into its component leads to a loss of practice, resulting from a effects. -

42 Laboratorial Verification of Ideas for Urban Space Compositional Design Completion Peter Kardoš Abstract the Subject-Mat
Laboratorial Verification of Ideas for Urban Space Compositional Design Completion Peter Kardoš Slovak Technical University in Bratislava, Department of urban and architectural areas, Laboratory of spatial endoscopy, Slovakia Abstract The subject-matter of the contribution is presentation of the non-conventional didactical methods application in architectural education and research at the Faculty of Architecture of the Slovak Technical University in Bratislava. It is an application of a laboratorial method of architectural endoscopy based on a model urban space simulation principle and on the acquirement of an electrooptical visual display image information from a recording periscope unit interaction in the real time and the real model space, with the option of spontaneous semantic evaluation of the output on a video-monitor and of a synchronic timing process recording on a magnetoscope. Application of a consequential powerful PC-configuration with creative software enables further digital sequential processing both on the graphical output and for multimedial presentation. Introduction Urban spatial structure showed to be the most sophisticated form and the most complex manifestation of vital activity of a man. An inhabitant develops an individual relationship to all component parts that represent the notion of dwelling to him. By sensual communication, focused mainly on iconic manifestation of individual urban structural components, the inhabitant stores in his/her mind a mental conception of its image [1; 2]. Significant components of this conception are also spatial quality and complexity which are subconsciously confronted and evaluated in subjective identification. Alongside the quantitative and qualitative aspects and the expression aspects there activates an image of acceptable scale, of spatial proportions, of space division, its differentiation, continuity, polarisation or of gradation. -

194 Perceptual Evaluation of the Spatial Manifestations of Urban Structures
Perceptual Evaluation of the Spatial Manifestations of Urban Structures – Developments Peter Kardos Slovak University of Technology in Bratislava, Slovakia Abstract The objective of this contribution is to bring to the attention of the community of experts in the field of architectural simulation the interdependence of the spatial manifestations of material components of urban environments and the phenomena of visual perception and imagination which we practically employ in education, professional design and which we also try to use in our contact with the clients. The way towards finding new qualities of urban environments should be dominated by our efforts to understand and perceive the urban structure as a real space-time manifestation, which is being mediated to the user also as a sensually experienced image (scene). Its atmos- phere and informative content give impulses for an individualized reaction from various aspects. The content of the experience is multi- leveled and the sensorial effects of its iconic components can be precisely verified by means of simulation processes in temporal sequences. Taking these aspects as basis, we are developing methods, which would by taking determined conditions into consideration, broaden the spectrum of research, verification, or evaluation of the real spatial manifestations and interactive actions in situ as well as their possible anticipation and performance in laboratory conditions. Perceptual simulation is, together with the significance of experiencing and evaluating the urban environment in the eye-level horizon, a starting point of spatial model simulation methods as a supportive experimental creative and verification tool. The new information technologies and the creative technical cooperation of analog and digital iconic simulation systems create unconventional possibilities for exact recording of information and impulses for the complicated transformational process engaging more actively the community in their participation. -
10 Evaluation in 3D Endoscopic Simulation – Application in Architectural Studios
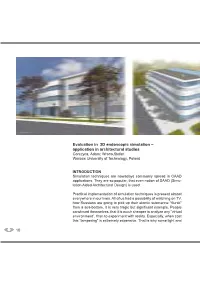
Evaluation in 3D endoscopic simulation – application in architectural studios Gorczyca, Adam; Wrona,Stefan Warsaw University of Technology, Poland INTRODUCTION Simulation techniques are nowadays commonly spread in CAAD applications. They are so popular, that even notion of SAAD (Simu- lation Aided Architectural Design) is used. Practical implementation of simulation techniques is present almost everywhere in our lives. All of us had a possibility of watching on TV, how Russians are going to pick up their atomic submarine “Kursk” from a sea-bottom. It is very tragic but significant example. People convinced themselves, that it is much cheaper to analyze any “virtual environment”, than to experiment with reality. Especially, when cost this “tampering” is extremely expensive. That is why some light and 10 scenography simulation are prepared by computers. From the same Fig 1: Three different shots taken from reasons filmic special effects are produced (sink of Titanic…). There a design of the office-building. Their purpose is presentation for potential are also obvious medical applications, where endoscopic surgery hirers of office-area. Late stage of replaced invading methods, while simulation of human body help design, but changes are still possible. students to learn anatomy. Forensic medicine try to identify faces of murders or body remains. Last, but not least - simulation is utilized in architectural design, where it’s range of use is very wide – from form modelling through light simulation and material application to visualization, animation etc. All examples mentioned above derive from different environments, but that proves, that a notion “3D environmental simulation” is strong rooted in contemporary world. From the other side architectural endoscopy and simulation is quite well investigated by scientists and, as being very up-to-date, it is still 11 researched. -

180 Video-Computer Modelling of Perception in the Educational Architectural Designing
VIDEO-COMPUTER MODELLING OF PERCEPTION IN THE EDUCATIONAL ARCHITECTURAL DESIGNING M. Matalasov, K. Zavrajine Moscow Architectural Institute, Russia Abstract In the report on the base of the example of the past and present term and diploma designs, executed in MARCHI, and tarkng into account the intermediate results, reported by us at past conferences EAEA, we have tried to analyse and generalize problems, versions of the techniques and technologies of education. The use of the videocomputer technologies, wich make it possible to realize the so-called “virtual reality”, helps to represent as verisimilar as possible (especially for not specialists) designs, wich do not jet exist. Here we get a freedom of chosing the way of designing: by means of the computer or in the traditional way - with the presentation of the results by means of the small-scale model (mock-up), as the task of the methods, proposed by as, is the presentation of the future object in real situations, and it is indifferent for videocomputer techniques, in which way the result was achieved. When the MARCHI students solve educational tasks, connected, at first, with three-dimentional and spatial compositions, and then with such obejcts, as e.g. buildings and their interioprs, residential districts, industrial complexes - it is convenient to use the system, consisting of a videocamera with an endoscope or micro-videocameras, plsaced on coordinate devices and connected with the computer. Thje chosen videoshots can be improved after their input into the computer depending on the available computer programs and printed. Thanks to the connection with the computer the work goes practically in reel time. -
The Future of Endoscopy
THE FUTURE OF ENDOSCOPY Proceedings of the 2nd European Architectural Endoscopy Association Conference in Vienna, Austria, August 30th - September 1st 1995 THE FUTURE OF ENDOSCOPY Proceedings of the 2nd European Architectural Endoscopy Association Conference in Vienna, Austria, August 30th - September 1st 1995 EDITED BY BOB MARTENS VIENNA UNIVERSITY OF TECHNOLOGY DEPARTMENT FOR SPATIAL SIMULATION IN COLLABORATION WITH THE INSTITUTE FOR SPATIAL INTERACTION AND SIMULATION (ISIS) CIP-Kurztitelaufnahme der Deutschen Bibliothek: Martens, Bob (ed.) The Future of Endoscopy. Proceedings of the 2nd European Archi- tectural Endoscopy Association Conference in Vienna, 1995 - IRIS-ISIS-Publications at ÖKK-Editions - vol. 1 - Österreichischer Kunst- und Kulturverlag, Wien 1996. ISBN- 3-85437-114-4 NE: Martens, Bob (Hrsg.) Cover (image processing): Borislav Petrov All rights reserved. No part of this book may be reprinted or reprodu- ced or utilized in any form or by any electronic, mechanical or other means, now known or hereafter invented, including photocopying and recording, or in any information storage or retrieval system, without permission in writing from the publishers. © 1996 Institute for Spatial Interaction and Simulation (Vienna) © 1996 Österreichischer Kunst- und Kulturverlag A-1016 Wien, Postfach 17 Tel.: (+43-1-) 587 85 51; Fax.: (+43-1-) 587 85 52 Preface The first EAEA-Conference took place at Tampere University of Technology (Finland, 1993) serving as an meeting point for specialists of endoscopy in architecture and displayed an approach to the potentials of endoscopy. The Vienna Conference in 1995 continued this direction and tried furthermore to serve as a platform for non-advanced users. EAEA '95 Vienna aimed at a cri- tical investigation of today's endoscopic culture with a focus on three themes: - SPACESCAPES: The Re-Design of Spatial Experience - HIGH TECH & LOW COST: The Choice of Appropriate Technology - THE NEXT GENERATION: The Implementation of Applications The Aspern-Workshop represented the highlight of this conference. -

La Visualisation 3D Et La Perspective, Comme Moyens Participatifs À L'élaboration De La Conception Architecturale Assistée
L4’?// 357ô. / Université de Montréal La visualisation 3D et la perspective, comme moyens participatifs à l’élaboration de la conception architecturale assistée par l’ordinateur Par Riad Djilali Faculté de l’aménagement Mémoire présenté à la Faculté des études supérieures en vue de l’obtention du grade de Maître ès sciences appliquées (M. Se. A) en aménagement avril 2007 © Riad Djilali, 2007 Université de Montréal Faculté des études supérieures NA t’ JDS o Université de Montréal Direction des bibliothèques AVIS L’auteur a autorisé l’Université de Montréal à reproduire et diffuser, en totalité ou en partie, par quelque moyen que ce soit et sur quelque support que ce soit, et exclusivement à des fins non lucratives d’enseignement et de recherche, des copies de ce mémoire ou de cette thèse. L’auteur et les coauteurs le cas échéant conservent la propriété du droit d’auteur et des droits moraux qui protègent ce document. Ni la thèse ou le mémoire, ni des extraits substantiels de ce document, ne doivent être imprimés ou autrement reproduits sans l’autorisation de l’auteur. Afin de se conformer à la Loi canadienne sur la protection des renseignements personnels, quelques formulaires secondaires, coordonnées ou signatures intégrées au texte ont pu être enlevés de ce document. Bien que cela ait pu affecter la pagination, il n’y a aucun contenu manquant. NOTICE The author of this thesis or dissertation has granted a nonexclusive license allowïng Université de Montréat to reproduce and publish the document, in part or in whole, and in any format, solely for noncommercial educational and research purposes. -

A Coordinate System Proposal for Investigating the Changing Body-Space Relationship Regarding Interactivity
A COORDINATE SYSTEM PROPOSAL FOR INVESTIGATING THE CHANGING BODY-SPACE RELATIONSHIP REGARDING INTERACTIVITY A THESIS SUBMITTED TO THE GRADUATE SCHOOL OF ENGINEERING AND SCIENCE OF BILKENT UNIVERSITY IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF SCIENCE IN ARCHITECTURE By Aslı Erdem June 2019 A COORDINATE SYSTEM PROPOSAL FOR INVESTIGATING THE CHANGING BODY-SPACE RELATIONSHIP REGARDING INTERACTIVITY By Aslı Erdem June 2019 We certify that we have read this thesis and that in our opinion it is fully adequate, in scope and in quality, as a thesis for the degree of Master of Science. ______________________________________________ Burcu Şenyapılı Özcan (Advisor) ______________________________________________ Aysu Berk Haznedaroğlu ______________________________________________ Başak Uçar Kırmızıgül Approved for the Graduate School of Engineering and Science: ______________________________________________ Ezhan Karaşan Director of the Graduate School ii ABSTRACT A COORDINATE SYSTEM PROPOSAL FOR INVESTIGATING THE CHANGING BODY-SPACE RELATIONSHIP REGARDING INTERACTIVITY Aslı Erdem M.S. in Architecture Advisor: Burcu Şenyapılı Özcan June 2019 With the development of new technologies, architectural spaces begin to offer different spatial experiences compared to conventional buildings. Especially with the emergence of interactive architecture, cues of a significant change in architecture are put forth. These changes are expected to transform the body-space relationship people form with the spaces they inhabit. Even though people still spend most of their daily lives in static buildings, movement and interactivity are seem to be more prevalent features of architecture in the future, influencing the way people experience spaces. As such, it is essential to understand the outline of the newly emerging body-space relationship and its effects on users’ spatial engagement. -

1 Videomodeling in Architecture. Introduction Into Concerned Problems
1 VIDEOMODELING IN ARCHITECTURE. INTRODUCTION INTO CONCERNED PROBLEMS G.V. Esaulov RAABS, MARKHI (State academy), Moscow, Russia Introduction Since the very 1st year Russian Academy of Architecture and building sciences that was established in 1992 by the Presidents’ decree as the higher scientific and creative organization in the country has always paid much attention to supporting and developing fundamental investigations in architecture, town-planning, building sciences, professional education and creative practice. Study of the birth process of the architectural idea and searching for tools assisting the architect’s creative activity and opportunities for adequate transfer of architectural image to potential consumer – relate to the number of problems which constantly bother the architectural community. Before turning to the conference, let us set certain conditions that have a significant impact on the development of architectural and construction activity in modern Russia. Architecture in modern Russia Market and profession Novelty in a Russian architectural process is determined by a new and specific social order, various financial abilities of private customers (instead of the former state monopoly), by new structure and organization of the design activity (the emergence of private competitive architectural workshops, along with incorporated design institutes), by forming a new market of architectural and construction activity which involves foreign architects and firms, application of new construction and design techniques and technologies advancement of new creative forces, talented young people in architecture. An important feature of architectural life in Russia of the beginning of the XXI century is the return to the practice of holding international contests – open contest with international participants for constructing the government block in Moscow-city (2002), customized international contest for second stage at Maryinsky theatre in St. -

The Emergence of Architectural Animation What Architectural Animation Brought to the Fore and Pushed to the Background
International Scientific Journal Architecture and Engineering http://architecture.scientific-journal.com The Emergence of Architectural Animation What Architectural Animation Brought to the Fore and Pushed to the Background Maha Zeini Al-Saati, David Botta, and Robert Woodbury School of Interactive Arts and Technology Simon Fraser University BC, Canada [email protected], [email protected], [email protected] Abstract— We present the emergence of architectural animation Enhancement: Speeds up the production of realistic images, from the point of view of Marshall McLuhan’s media effects— and eases broadcast of the images. The digital modeling what is suppressed, enhanced, and revived, and what takes on component of 3D computer graphics speeds up the design different meaning. process by enabling drawings to be easily revised. Keywords-Architectural animation, Marshall McLuhan, Tetrad Obsolescence: Suppresses technical pen-and-paper of Media Effects. perspectives, sequential sketches, architectural scale models, architectural endoscopy, stop-motion animation, and the I. INTRODUCTION humanized touch. By the late 1980s, 3D computer graphics facilitated the Retrieval: sculpting, chalk-boarding, connecting-the-dots, emergence architectural animation. Soon, architectural CAD theatrical staging, and narrative space once again relevant. tools included modules for 3D modeling and rendering (using Reversal: Difficult to learn 3D animation and CAD lights, colors, textures, and camera positions to make images). interfaces together with rapidly evolving technology in a Animation tools could import standard architectural file technophile culture flips the designer from being one who is in formats. Prior animation techniques were ostensibly not control to one who is controlled by the technology. Convincing applicable to architectural animation, and therefore the kinds of realism becomes a vehicle for telling lies [1]. -

Nummer 10/17 08 Maart 2017 Nummer 10/17 2 08 Maart 2017
Nummer 10/17 08 maart 2017 Nummer 10/17 2 08 maart 2017 Inleiding Introduction Hoofdblad Patent Bulletin Het Blad de Industriële Eigendom verschijnt The Patent Bulletin appears on the 3rd working op de derde werkdag van een week. Indien day of each week. If the Netherlands Patent Office Octrooicentrum Nederland op deze dag is is closed to the public on the above mentioned gesloten, wordt de verschijningsdag van het blad day, the date of issue of the Bulletin is the first verschoven naar de eerstvolgende werkdag, working day thereafter, on which the Office is waarop Octrooicentrum Nederland is geopend. Het open. Each issue of the Bulletin consists of 14 blad verschijnt alleen in elektronische vorm. Elk headings. nummer van het blad bestaat uit 14 rubrieken. Bijblad Official Journal Verschijnt vier keer per jaar (januari, april, juli, Appears four times a year (January, April, July, oktober) in elektronische vorm via www.rvo.nl/ October) in electronic form on the www.rvo.nl/ octrooien. Het Bijblad bevat officiële mededelingen octrooien. The Official Journal contains en andere wetenswaardigheden waarmee announcements and other things worth knowing Octrooicentrum Nederland en zijn klanten te for the benefit of the Netherlands Patent Office and maken hebben. its customers. Abonnementsprijzen per (kalender)jaar: Subscription rates per calendar year: Hoofdblad en Bijblad: verschijnt gratis Patent Bulletin and Official Journal: free of in elektronische vorm op de website van charge in electronic form on the website of the Octrooicentrum Nederland.