Symbols and Abbreviations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
US2510669.Pdf
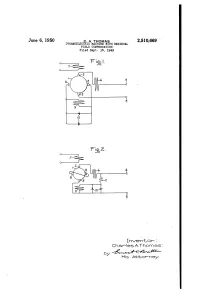
June 6, 1950 C. A. THOMAS 2,510,669 DYNAMOELECTRICMACHINE WITH RESIDUAL FIELD COMPENSATION Filed Sept. 15, 1949 InN/entor : Charles A.Thomas : -2-YHis attorney. 213-4- - Patented June 6, 1950 2,510,669 UNITED STATES PATENT OFFICE 2,510,669 DYNAMoELECTRIC MACHINE WITH RESD UAL FIELD coMPENSATION Charles A. Thomas, Fort Wayne, Ind., assignor - to General Electric Company, a corporation of New York Application September 15, 1949, Serial No. 115,907 2 Claims. (Cl. 322-79) 2 My invention relates to dynamoelectric ma volves added expense and requires additional chines incorporating means for eliminating field maintenance. excitation which is due to residual magnetism It is, therefore, another object of my inven in the field and, more particularly, to dynamo tion to provide a dynamoelectric machine in electric machines having residual field Com Corporating a residual field compensator which pensating windings and associated non-linear does not require additional Switches or auxiliary impedance elements for rendering said windings contacts, but which is, nevertheless, effective inoperative when not required, without the use during periods of zero field excitation by the of switches. control field Windings and ineffective when the in certain types of dynamoelectric machines, O control windings supply excitation. the presence of the usual residual magnetization My invention, therefore, Consists essentially remaining in the field poles of the machine after of a dynamoelectric machine having a residual field excitation has been removed is undesired magnetization compensator which includes a and troublesone. This is especially true in ar- . compensator field winding connected in the air nature reaction excited dynamoelectric ma 5 nature circuit of the machine and associated chines having compensation for secondary ar non-linear impedance elements to render the nature reaction and commonly known as ampli winding ineffective when normal field excitation dynes. -

Naval Postgraduate School
NPS-97-06-003 NAVAL POSTGRADUATE SCHOOL MONTEREY, CALIFORNIA SHIP ANTI BALLISTIC MISSILE RESPONSE (SABR) by LT Allen P. Johnson LT David C. Leiker LT Bryan Breeden ENS Parker Carlisle LT Willard Earl Duff ENS Michael Diersing LT Paul F. Fischer ENS Ryan Devlin LT Nathan Hornback ENS Christopher Glenn TDSI Students LT Chris Hoffmeister, USN LT John Kelly, USN LTC Tay Boon Chong, SAF LTC Yap Kwee Chye, SAF MAJ Phang Nyit Sing, SAF CPT Low Wee Meng, SAF CPT Ang Keng-ern, SAF CPT Ohad Berman, IDF Mr. Fann Chee Meng, DSTA, Singapore Mr. Chin Chee Kian, DSTA, Singapore Mr. Yeo Jiunn Wah, DSTA, Singapore June 2006 Approved for public release; distribution is unlimited. Prepared for: Deputy Chief of Naval Operations for Warfare Requirements and Programs (OPNAV N7), 2000 Navy Pentagon, Rm. 4E392, Washington, D.C. 20350-2000 THIS PAGE INTENTIONALLY LEFT BLANK REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instruction, searching existing data sources, gathering and maintaining the data needed, and completing and reviewing the collection of information. Send comments regarding this burden estimate or any other aspect of this collection of information, including suggestions for reducing this burden, to Washington Headquarters Services, Directorate for Information Operations and Reports, 1215 Jefferson Davis Highway, Suite 1204, Arlington, VA 22202-4302, and to the Office of Management and Budget, Paperwork Reduction Project (0704-0188) Washington, DC 20503. 1. AGENCY USE ONLY (Leave blank) 2. REPORT DATE 3. -

The Design of a Permanent Magnet In-Wheel Motor with Dual-Stator and Dual-Field-Excitation Used in Electric Vehicles
energies Article The Design of a Permanent Magnet In-Wheel Motor with Dual-Stator and Dual-Field-Excitation Used in Electric Vehicles Peng Gao *, Yuxi Gu and Xiaoyuan Wang School of Electrical and Information Engineering, Tianjin University, No. 92 Weijin Road, Tianjin 300072, China; [email protected] (Y.G.); [email protected] (X.W.) * Correspondence: [email protected]; Tel.: +86-022-2740-6705 Received: 15 January 2018; Accepted: 8 February 2018; Published: 12 February 2018 Abstract: The in-wheel motor has received more attention owing to its simple structure, high transmission efficiency, flexible control, and easy integration design. It is difficult to achieve high performance with conventional motors due to their dimensions and structure. This paper presents a new dual-stator and dual-field-excitation permanent-magnet in-wheel motor (DDPMIM) that is based on the structure of the conventional in-wheel motor and the structure of both the radial and axial magnetic field motor. The finite element analysis (FEA) model of the DDPMIM is established and compared with that of the conventional in-wheel motor. The results show that the DDPMIM achieves a higher output torque at low speeds and that the flux-weakening control strategy is not needed in the full speed range. Keywords: dual-stator and dual-field-excitation permanent-magnet in-wheel motors (DDPMIM); back electromotive force (EMF); electric vehicles (EVs); in-wheel motors; axial flux motor; radial flux motor 1. Introduction Electric vehicles (EVs) will soon become a common mode of transport. Electric motors used in EVs have to satisfy many requirements: (1) a high power density and a high torque density; (2) a high output torque at low speeds and a high power output at high speeds; (3) an ability to operate within a wide range of speed in a highly efficient manner; (4) high reliability; and (5) low cost [1]. -

Evaluation of Direct Torque Control with a Constant-Frequency Torque Regulator Under Various Discrete Interleaving Carriers
electronics Article Evaluation of Direct Torque Control with a Constant-Frequency Torque Regulator under Various Discrete Interleaving Carriers Ibrahim Mohd Alsofyani and Kyo-Beum Lee * Department of Electrical and Computer Engineering, Ajou University, 206, World cup-ro, Yeongtong-gu Suwon 16499, Korea * Correspondence: [email protected]; Tel.: +82-31-219-2376 Received: 25 June 2019; Accepted: 20 July 2019; Published: 23 July 2019 Abstract: Constant-frequency torque regulator–based direct torque control (CFTR-DTC) provides an attractive and powerful control strategy for induction and permanent-magnet motors. However, this scheme has two major issues: A sector-flux droop at low speed and poor torque dynamic performance. To improve the performance of this control method, interleaving triangular carriers are used to replace the single carrier in the CFTR controller to increase the duty voltage cycles and reduce the flux droop. However, this method causes an increase in the motor torque ripple. Hence, in this work, different discrete steps when generating the interleaving carriers in CFTR-DTC of an induction machine are compared. The comparison involves the investigation of the torque dynamic performance and torque and stator flux ripples. The effectiveness of the proposed CFTR-DTC with various discrete interleaving-carriers is validated through simulation and experimental results. Keywords: constant-frequency torque regulator; direct torque control; flux regulation; induction motor; interleaving carriers; low-speed operation 1. Introduction There are two well-established control strategies for high-performance motor drives: Field orientation control (FOC) and direct torque control (DTC) [1–3]. The FOC method has received wide acceptance in industry [4]. Nevertheless, it is complex because of the requirement for two proportional-integral (PI) regulators, space-vector modulation (SVM), and frame transformation, which also needs the installation of a high-resolution speed encoder. -

Control of DC Servomotor
Control of DC Servomotor Report submitted in partial fulfilment of the requirement to the degree of B.SC In Electrical and Electronic Engineering Under the supervision of Dr. Abdarahman Ali Karrar By Mohammed Sami Hassan Elhakim To Department of Electrical and Electronic Engineering University of Khartoum July 2008 Dedication I would like to take this opportunity to write these humble words that are unworthy of expressing my deepest gratitude for all those who made this possible. First of all I would like to thank god for my general existence and everything else around and within me. Second I would like to thank my beloved parents(Sami & Sawsan), my brothers (Tarig & Hassan), and my sister (Latifa), thank you so much for your support, guidance and care, you were always there to make me feel better and encourage me. I would like also to thanks all my friends inside and out Khartoum university, thank you for your patients tolerance and understanding, for your endless love that has stretched so far, for easing my pain and pulling me through. A special thanks to my partner Muzaab Hashiem without his help and advice i won’t be able to do what i did, thank you for being an ideal partner, friend and bother. Last but not the least i would like to thank my supervisor Dr. Karar and all those who helped me throughout this project, thank you for filling my mind with this rich knowledge. Mohammed Sami Hassan Elhakim. I Acknowledgement The first word goes to God the Almighty for bringing me to this world and guiding me as i reached this stage in my life and for making me live and see this work. -

Overlapped Electromagnetic Coilgun for Low Speed Projectiles
ISSN (Print) 1226-1750 ISSN (Online) 2233-6656 Journal of Magnetics 20(3), 322-329 (2015) http://dx.doi.org/10.4283/JMAG.2015.20.3.322 Overlapped Electromagnetic Coilgun for Low Speed Projectiles Hany M. Mohamed1, Mahmoud A. Abdalla2*, Abdelazez Mitkees, and Waheed Sabery Electrical Engineering Branch, MTC College, Cairo, Egypt [email protected] [email protected] (Received 20 February 2015, Received in final form 16 June 2015, Accepted 16 June 2015) This paper presents a new overlapped coilgun configuration to launch medium weight projectiles. The proposed configuration consists of a two-stage coilgun with overlapped coil covers with spacing between them. The theoretical operation of a multi-stage coilgun is introduced, and a transient simulation was conducted for projectile motion through the launcher by using a commercial transient finite element software, ANSOFT MAXWELL. The excitation circuit design for each coilgun is reported, and the results indicate that the overlapped configuration increased the exit velocity relative to a non-overlapped configuration. Different configurations in terms of the optimum length and switching time were attempted for the proposed structure, and all of these cases exhibited an increase in the exit velocity. The exit velocity tends to increase by 27.2% relative to that of a non-overlapped coilgun of the same length. Keywords : electromagnetic launch, excitation circuit, lorentz force, overlapped coilgun 1. Introduction is not easy to obtain the main performance parameters and optimize the design [3]. Electromagnetic (EM) launch technology is a strong Sandia National Laboratories has succeeded in coilgun candidate to launch objects with high velocities over long design and operations by developing four guns with distances. -
High Efficiency Megawatt Motor Conceptual Design
High Efficiency Megawatt Motor Conceptual Design Ralph H. Jansen, Yaritza De Jesus-Arce, Dr. Rodger Dyson, Dr. Andrew Woodworth, Dr. Justin Scheidler, Ryan Edwards, Erik Stalcup, Jarred Wilhite, Dr. Kirsten Duffy, Paul Passe and Sean McCormick NASA Glenn Research Center, Cleveland, Ohio, 44135 Advanced Air Vehicles Program Advanced Transport Technologies Project Motivation • NASA is investing in Electrified Aircraft Propulsion (EAP) research to improve the fuel efficiency, emissions, and noise levels in commercial transport aircraft • The goal is to show that one or more viable EAP concepts exist for narrow- body aircraft and to advance crucial technologies related to those concepts. • Electric Machine technology needs to be advanced to meet aircraft needs. Advanced Air Vehicles Program Advanced Transport Technologies Project 2 Outline • Machine features • Importance of electric machine efficiency for aircraft applications • HEMM design requirements • Machine design • Performance Estimate and Sensitivity • Conclusion Advanced Air Vehicles Program Advanced Transport Technologies Project 3 NASA High Efficiency Megawatt Motor (HEMM) Power / Performance • HEMM is a 1.4MW electric machine with a stretch performance goal of 16 kW/kg (ratio to EM mass) and efficiency of >98% Machine Features • partially superconducting (rotor superconducting, stator normal conductors) • synchronous wound field machine that can operate as a motor or generator • combines a self-cooled, superconducting rotor with a semi- slotless stator Vehicle Level Benefits • -

3-D FEM Analysis, Prototyping and Tests of an Axial Flux Permanent-Magnet Wind Generator
energies Article 3-D FEM Analysis, Prototyping and Tests of an Axial Flux Permanent-Magnet Wind Generator Joya C. Kappatou 1,*, Georgios D. Zalokostas 2 and Dimitrios A. Spyratos 3 1 Department of Electrical and Computer Engineering, University of Patras, 26500 Patras, Greece 2 Electrical and Computer Engineer, Amazonon 3 Evrytania, 36100 Karpenissi, Greece; [email protected] 3 Electrical and Computer Engineering student, University of Patras, 26500 Patras, Greece; [email protected] * Correspondence: [email protected]; Tel.: +30-261-099-6413 Received: 20 June 2017; Accepted: 23 August 2017; Published: 26 August 2017 Abstract: This paper contributes to the research and development of Axial Flux Permanent Magnet Synchronous Machines (AFPMSM); and in particular the design, the construction stages and measurements of a double rotor single internal non-ferromagnetic stator with a trapezoidal-concentrated winding machine for wind power generation applications. The initial dimensions of the machine were calculated using analytical formulas and a model was created and analyzed using the 3D Finite Element Method (FEM). The shape of the magnets of the machine was optimized and presented in a previous paper and a prototype was constructed and tested in the laboratory. In addition, a temperature test of the stator was performed experimentally. Finally, the effect of the different axial widths of the two air gaps on the electrical magnitudes and the field of the machine were investigated using both FEM analysis and experiments. Keywords: Axial flux machine; finite element analysis; permanent-magnet generator; wind power generator 1. Introduction Research on the design and construction of Axial Flux Permanent Magnet Synchronous Machines (AFPMSM) has been attracting increasing scientific interest over the past few years. -

Single-Phase Line Start Permanent Magnet Synchronous Motor with Skewed Stator*
POWER ELECTRONICS AND DRIVES Vol. 1(36), No. 2, 2016 DOI: 10.5277/PED160212 SINGLE-PHASE LINE START PERMANENT MAGNET SYNCHRONOUS MOTOR WITH SKEWED STATOR* MACIEJ GWOŹDZIEWICZ, JAN ZAWILAK Wrocław University of Science and Technology, Wybrzeże Stanisława Wyspiańskiego 27, 50-370 Wrocław, Poland, e-mail: [email protected], [email protected] Abstract: The article deals with single-phase line start permanent magnet synchronous motor with skewed stator. Constructions of two physical motor models are presented. Results of the motors run- ning properties are analysed. Keywords: single-phase motor, permanent magnet, skew, vibration 1. INTRODUCTION Single-phase induction motors almost always have skewed rotors. It is a simple and effective solution in limitation of the motor vibration, noise and torque pulsation. In the case of line start permanent magnet synchronous motors skewed rotor is ex- tremely difficult to manufacture due to interior permanent magnets. Skewed stator is less complicated in comparison with skewed rotor [3], [4], [7], [8]. During many tests of single-phase line start permanent magnet synchronous motor physical models The authors noticed that vibration is one of the main drawbacks of these motors [1], [2]. It prompted them to construct and build a single-phase line start permanent magnet motor with skewed stator. 2. MOTOR CONSTRUCTION Two dimensional field-circuit models of the single-phase line start permanent magnet synchronous motor were applied in Maxwell software. The models are based on the mass production single-phase induction motor Seh 80-2B type: rated power Pn = 1.1 kW, rated voltage Un = 230 V, rated frequency fn = 50 Hz, number of pole * Manuscript received: September 7, 2016; accepted: December 7, 2016. -

Understanding Permanent Magnet Motor Operation and Optimized Filter Solutions
Understanding Permanent Magnet Motor Operation and Optimized Filter Solutions June 15, 2016 Todd Shudarek, Principal Engineer MTE Corporation N83 W13330 Leon Road Menomonee Falls WI 53154 www.mtecorp.com Abstract Recent trends indicate the use of permanent magnet (PM) motors because of its energy savings over induction motors. PM motors offer energy savings, higher power densities, and improved control. The upfront cost of a PM motor may be higher than an induction motor, but the total cost of ownership may be lower. However, a PM motor system brings design challenges in terms of selecting the best variable frequency drive (VFD) as well as a filter to protect the motor. A PM motor requires the use of a VFD to start and operate. The best VFDs will need to operate at higher switching frequencies to meet the higher fundamental frequencies of the PM motors. In turn, the PM motor will need to be protected from power distortion, harmonics, and overheating. While a traditional filter is de-rated to meet the higher frequencies, this paper will demonstrate that, by nature of the operation of a PM motor, an appropriately design filter that operates for higher switching and fundamental frequencies will reduce the size, weight, and cost of the system. Introduction special considerations when specifying a filter for a PM motor system, specifically the use of Historically induction motors have been used in higher switching frequencies and filters. a variety of industrial applications. Recent trends indicate a shift toward permanent magnet (PM) motors which offer up to 20% energy savings, Induction Motor Operation higher power densities, and improved control. -

Vector Control of an Induction Motor Based on a DSP
Vector Control of an Induction Motor based on a DSP Master of Science Thesis QIAN CHENG LEI YUAN Department of Energy and Environment Division of Electric Power Engineering CHALMERS UNIVERSITY OF TECHNOLOGY G¨oteborg, Sweden 2011 Vector Control of an Induction Motor based on a DSP QIAN CHENG LEI YUAN Department of Energy and Environment Division of Electric Power Engineering CHALMERS UNIVERSITY OF TECHNOLOGY G¨oteborg, Sweden 2011 Vector Control of an Induction Motor based on a DSP QIAN CHENG LEI YUAN © QIAN CHENG LEI YUAN, 2011. Department of Energy and Environment Division of Electric Power Engineering Chalmers University of Technology SE–412 96 G¨oteborg Sweden Telephone +46 (0)31–772 1000 Chalmers Bibliotek, Reproservice G¨oteborg, Sweden 2011 Vector Control of an Induction Motor based on a DSP QIAN CHENG LEI YUAN Department of Energy and Environment Division of Electric Power Engineering Chalmers University of Technology Abstract In this thesis project, a vector control system for an induction motor is implemented on an evaluation board. By comparing the pros and cons of eight candidates of evaluation boards, the TMS320F28335 DSP Experimenter Kit is selected as the digital controller of the vector control system. Necessary peripheral and interface circuits are built for the signal measurement, the three-phase inverter control and the system protection. These circuits work appropriately except that the conditioning circuit for analog-to-digital con- version contains too much noise. At the stage of the control algorithm design, the designed vector control system is simulated in Matlab/Simulink with both S-function and Simulink blocks. The simulation results meet the design specifications well. -

Axial Field Permanent Magnet Machines with High Overload Capability for Transient Actuation Applications
THE UNIVERSITY OF SHEFFIELD Axial field permanent magnet machines with high overload capability for transient actuation applications By Jiangnan Gong A Thesis submitted for the degree of Doctor of Philosophy Department of Electronic and Electrical Engineering The University of Sheffield. JANUARY 2018 ABSTRACT This thesis describes the design, construction and testing of an axial field permanent magnet machine for an aero-engine variable guide vane actuation system. The electrical machine is used in combination with a leadscrew unit that results in a minimum torque specification of 50Nm up to a maximum speed of 500rpm. The combination of the geometry of the space envelope available and the modest maximum speed lends itself to the consideration of an axial field permanent magnet machines. The relative merits of three topologies of double-sided permanent magnet axial field machines are discussed, viz. a slotless toroidal wound machine, a slotted toroidal machine and a yokeless axial field machine with separate tooth modules. Representative designs are established and analysed with three-dimensional finite element method, each of these 3 topologies are established on the basis of a transient winding current density of 30A/mm2. Having established three designs and compared their performance at the rated 50Nm point, further overload capability is compared in which the merits of the slotless machine is illustrated. Specifically, this type of axial field machine retains a linear torque versus current characteristic up to higher torques than the other two topologies, which are increasingly affected by magnetic saturation. Having selected a slotless machine as the preferred design, further design optimization was performed, including detailed assessment of transient performance.