The First Successful Roadable Aircraft
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

United States Patent (19) 11 Patent Number: 5,836,541 Pham (45) Date of Patent: Nov
USOO5836541A United States Patent (19) 11 Patent Number: 5,836,541 Pham (45) Date of Patent: Nov. 17, 1998 54) EASILY-CONVERTIBLE FIXED-WING 3,986,686 10/1976 Girard ..................................... 244f7 A ROADABLE AIRCRAFT 4,269,374 5/1981 Miller .......................................... 244/2 4,720,061 1/1988 Abdenour et al. ... 244/46 76 Inventor: Roger N. C. Pham, 625 Veranda Ct., 4.881,701 11/1989 Bullard - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 244/2 #1140, Grand Prairie, Tex. 75050 5,050,817 9/1991 Miller .......................................... 244/2 21 Appl.ppl. No.: 859,7329 Primary Examiner-Galen L. Barefoot 57 ABSTRACT 22 Filed: May 21, 1997 57 A fixed-wing four-seat light aircraft that can be easily Related U.S. Application Data converted to a roadway vehicle within minutes by a single perSon in the field, comprising a one-piece wing center panel 63 Continuation-in-part of Ser. No. 811,503, Mar. 5, 1997. with foldable wing tips on each sides. The whole wing unit (51) Int. Cl. ............................................... B64C37.00 is then rotatably mounted on top of the fuselage. The aircraft 52 U.S. CI 24412; 244/46; 244/49 features a conventional front-engine-and-propeller lay-out, 58 Fi la fs - - - - - - - - h - - - - - - - - - - - - - - - - - - - - - - - s 2442. 46.49 with a short fuselage for convenient roadability and 58) Field of Searc 244/135R, 1 R, 100 R. 1 02 R 50 garageability, with horizontal Stabilizer of Significant Span s s s s with foldable tips for adequate flight stability. The vehicle 56) References Cited has a low ride-height with a low center of gravity, four wheels with independent Suspension, nose-height leveling U.S. -

Eclipse and Kestrel Are One!
INTERNATIONAL FLYING THE DIY TRAVEL PREP MAGENTA LINE Border crossings made easier Will you fall victim? EJOPA EDITION PAGE 14 THE PRIVATE JET MAGAZINE • SUMMER 2015 ECLIPSE AND KESTREL ARE ONE! AUTOMATED FORECASTS Why computer WX prediction is worrisome READY FOR A FLYING CAR? Lots of manufacturers race from freeways to airways PAGE 54 FAA Type Ratings & Recurrent Flight Training Sales • Training • Delivery Your Turbine Transition Specialists jetAVIVA is an authority on owner/operator flown turbine aircraft, oering acquisition and sales services backed with the experience of completing hundreds of transactions. Furthermore, we provide acceptance, delivery, and training services in all production light turbine aircraft. jetAVIVA is focused Featured in AOPA PILOT Magazine on providing Clients with comprehensive services to choose the right aircraft and operate it with maximum eciency and safety. Customized Flight Training Programs on Your Time at Your Location FAA Type Rating Practical Tests & Recurrent Training Per FAR 61.58 CE-500 • CE-510 • CE-525 • CE-560 XL • CE-650 • LR-JET • RA-390 • DA-50 John Azma is an FAA Designated Pilot Examiner qualified to provide Recurrent Training & Type Rating Practical Tests that may be added to your private, commercial and airline transport pilot certificate. Azma FLT Inc. is based in Orlando Florida at KORL. Our experienced & professional flight instructors are also available to provide training at your location. Highly regarded in the industry, and approved by insurance companies, Azma Contact Us To Learn More: FLT Inc. has been featured in aviation specific publications and editorials. Our 844-296-2358 commitment to excellence and superior services begins when you first contact Learn what jetAVIVA can do for you at www.jetAVIVA.com [email protected] us and continues beyond the completion of your training. -

Preparation of Papers for AIAA Technical Conferences
15th AIAA Aviation Technology, Integration, and Operations Conference 2015 Held at the AIAA Aviation Forum 2015 Dallas, Texas, USA 22-26 June 2015 Volume 1 of 3 ISBN: 978-1-5108-0818-8 Printed from e-media with permission by: Curran Associates, Inc. 57 Morehouse Lane Red Hook, NY 12571 Some format issues inherent in the e-media version may also appear in this print version. The contents of this work are copyrighted and additional reproduction in whole or in part are expressly prohibited without the prior written permission of the Publisher or copyright holder. The resale of the entire proceeding as received from CURRAN is permitted. For reprint permission, please contact AIAA’s Business Manager, Technical Papers. Contact by phone at 703-264-7500; fax at 703-264-7551 or by mail at 1801 Alexander Bell Drive, Reston, VA 20191, USA. TABLE OF CONTENTS VOLUME 1 TERMINAL & SURFACE OPERATIONS I A Robust and Practical Decision Support Tool for Integrated Arrival-Departure-Surface Traffic Management (AIAA 2015-2270)...............................................................................................................................................................................................1 Aditya Saraf, Valentino Felipe, Bruce Sawhill Identification of Local and Propagated Queuing Effects at Major Airports (AIAA 2015-2271)............................................................16 Husni R. Idris Taxi Time Prediction at Charlotte Airport Using Fast-Time Simulation and Machine Learning Techniques (AIAA 2015-2272)..........................................................................................................................................................................................................32 -

1954 Aerocar One
1954 Aerocar One Aerocar International's Aerocar (often called the Taylor Aerocar ) was an American roadable aircraft, designed and built by Moulton Taylor in Longview, Washington, in 1949. Although six examples were built, the Aerocar never entered production. Design and development Taylor's design of a roadable aircraft dates back to 1946. During a trip to Delaware, he met inventor Robert E. Fulton, Jr., who had designed an earlier roadable airplane, the Aerophobia. Taylor recognized that the detachable wings of Fulton’s design would be better replaced by folding wings. His prototype Aerocar utilized folding wings that allowed the road vehicle to be converted into flight mode in five minutes by one person. When the rear license plate was flipped up, the operator could connect the propeller shaft and attach a pusher propeller. The same engine drove the front wheels through a three-speed manual transmission. When operated as an aircraft, the road transmission was simply left in neutral (though backing up during taxiing was possible by the using the reverse gear.) On the road, the wings and tail unit were designed to be towed behind the vehicle. Aerocars could drive up to 60 miles per hour and have a top airspeed of 110 miles per hour. Testing and certification Civil certification was gained in 1956 under the auspices of the Civil Aeronautics Administration (CAA), and Taylor reached a deal with Ling-Temco-Vought for serial production on the proviso that he was able to attract 500 orders. When he was able to find only half that number of buyers, plans for production ended, and only six examples were built, with one still flying as of 2008 and another rebuilt by Taylor into the only Aerocar III. -

Fluid Mechanics, Drag Reduction and Advanced Configuration Aeronautics
NASA/TM-2000-210646 Fluid Mechanics, Drag Reduction and Advanced Configuration Aeronautics Dennis M. Bushnell Langley Research Center, Hampton, Virginia December 2000 The NASA STI Program Office ... in Profile Since its founding, NASA has been dedicated to CONFERENCE PUBLICATION. Collected the advancement of aeronautics and space papers from scientific and technical science. The NASA Scientific and Technical conferences, symposia, seminars, or other Information (STI) Program Office plays a key meetings sponsored or co-sponsored by part in helping NASA maintain this important NASA. role. SPECIAL PUBLICATION. Scientific, The NASA STI Program Office is operated by technical, or historical information from Langley Research Center, the lead center for NASA programs, projects, and missions, NASA's scientific and technical information. The often concerned with subjects having NASA STI Program Office provides access to the substantial public interest. NASA STI Database, the largest collection of aeronautical and space science STI in the world. TECHNICAL TRANSLATION. English- The Program Office is also NASA's institutional language translations of foreign scientific mechanism for disseminating the results of its and technical material pertinent to NASA's research and development activities. These mission. results are published by NASA in the NASA STI Report Series, which includes the following Specialized services that complement the STI report types: Program Office's diverse offerings include creating custom thesauri, building customized TECHNICAL PUBLICATION. Reports of databases, organizing and publishing research completed research or a major significant results ... even providing videos. phase of research that present the results of NASA programs and include extensive For more information about the NASA STI data or theoretical analysis. -
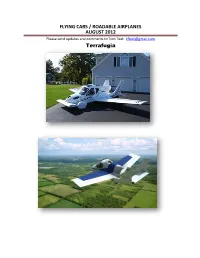
FLYING CARS / ROADABLE AIRPLANES AUGUST 2012 Please Send Updates and Comments to Tom Teel: [email protected] Terrafugia
FLYING CARS / ROADABLE AIRPLANES AUGUST 2012 Please send updates and comments to Tom Teel: [email protected] Terrafugia INTERNATIONAL FLYING CAR ASSOCIATION http://www.flyingcarassociation.com We'd like to welcome you to the International Flying Car Association. Our goal is to help advance the emerging flying car industry by creating a central resource for information and communication between those involved in the industry, news networks, governments, and those seeking further information worldwide. The flying car industry is in its formative stages, and so is IFCA. Until this site is fully completed, we'd like to recommend you visit one of these IFCA Accredited Sites. www.flyingcars.com www.flyingcarreviews.com www.flyingcarnews.com www.flyingcarforums.com REFERENCE INFORMATION Roadable Times http://www.roadabletimes.com Transformer - Coming to a Theater Near You? http://www.aviationweek.com/Blogs.aspx?plckBlo PARAJET AUTOMOTIVE - SKYCAR gId=Blog:a68cb417-3364-4fbf-a9dd- http://www.parajetautomotive.com/ 4feda680ec9c&plckController=Blog&plckBlogPage= In January 2009 the Parajet Skycar expedition BlogViewPost&newspaperUserId=a68cb417-3364- team, led by former British army officer Neil 4fbf-a9dd- Laughton and Skycar inventor Gilo Cardozo 4feda680ec9c&plckPostId=Blog%253aa68cb417- successfully completed its inaugural flight, an 3364-4fbf-a9dd- incredible journey from the picturesque 4feda680ec9cPost%253a6b784c89-7017-46e5- surroundings of London to Tombouctou. 80f9- Supported by an experienced team of overland 41a312539180&plckScript=blogScript&plckElement -

Some NASA Perspectives on H2 Presented by Steven Schneider NASA Glenn Research Center
National Aeronautics and Space Administration Some NASA Perspectives on H2 Presented by Steven Schneider NASA Glenn Research Center H2@Airports Workshop November 4, 2020 1 www.nasa.gov NASA Subsonic Transport Strategy Focus on 4 Key Technologies Electrified Aircraft Propulsion Small Core Gas Turbine Up to 5% fuel burn and maintenance benefit 5%-10% fuel burn benefit Transonic Truss-Braced Wing 7%-10% fuel burn benefit High Rate Composite Manufacturing 4x-6x manufacturing rate increase Ensure U.S. industry is the first to establish the new “S Curve” for the next 50 years of transports NASA Perspectives on H2 • H2 offers opportunity as a clean energy carrier • NASA has explored H2 applications for air transportation in past decades, which helped to highlight benefits and challenges • Noted recent increase in interest associated with H2-powered concepts and research in the air transportation community • NASA’s current research portfolio includes some investigation of H2 energy storage and hydrocarbon conversion for fuel cells on electric aircraft, though no current emphasis on other H2-related challenges • Need to consider off-aircraft challenges: the cost/ energy/ environmental impact of H2 production; the cost of developing H2 infrastructure; characterization of contrails and their atmospheric impacts Since NASA’s H2 interest has related to vehicle-level technology development and integration, we are happy to see workshops focused on solving the challenges of H2 airport infrastructure Examples of Renewed Interest in H2 ZeroAvia Commercial -

Lockheed Martin F-35 Lightning II Incorporates Many Significant Technological Enhancements Derived from Predecessor Development Programs
AIAA AVIATION Forum 10.2514/6.2018-3368 June 25-29, 2018, Atlanta, Georgia 2018 Aviation Technology, Integration, and Operations Conference F-35 Air Vehicle Technology Overview Chris Wiegand,1 Bruce A. Bullick,2 Jeffrey A. Catt,3 Jeffrey W. Hamstra,4 Greg P. Walker,5 and Steve Wurth6 Lockheed Martin Aeronautics Company, Fort Worth, TX, 76109, United States of America The Lockheed Martin F-35 Lightning II incorporates many significant technological enhancements derived from predecessor development programs. The X-35 concept demonstrator program incorporated some that were deemed critical to establish the technical credibility and readiness to enter the System Development and Demonstration (SDD) program. Key among them were the elements of the F-35B short takeoff and vertical landing propulsion system using the revolutionary shaft-driven LiftFan® system. However, due to X- 35 schedule constraints and technical risks, the incorporation of some technologies was deferred to the SDD program. This paper provides insight into several of the key air vehicle and propulsion systems technologies selected for incorporation into the F-35. It describes the transition from several highly successful technology development projects to their incorporation into the production aircraft. I. Introduction HE F-35 Lightning II is a true 5th Generation trivariant, multiservice air system. It provides outstanding fighter T class aerodynamic performance, supersonic speed, all-aspect stealth with weapons, and highly integrated and networked avionics. The F-35 aircraft -

Class 244 Aeronautics and Astronautics 244 - 1
CLASS 244 AERONAUTICS AND ASTRONAUTICS 244 - 1 244 AERONAUTICS AND ASTRONAUTICS 1 R MISCELLANEOUS 168 ..By solar pressure 1 N .Noise abatement 169 ..By jet motor 1 A .Lightning arresters and static 170 ..By nutation damper eliminators 171 ..With attitude sensor means 1 TD .Trailing devices 171.1 .With propulsion 2 COMPOSITE AIRCRAFT 171.2 ..Steerable mount 3 .Trains 171.3 ..Launch from surface to orbit 3.1 MISSILE STABILIZATION OR 171.4 ...Horizontal launch TRAJECTORY CONTROL 171.5 ..Without mass expulsion 3.11 .Remote control 171.6 .Having launch pad cooperating 3.12 ..Trailing wire structure 3.13 ..Beam rider 171.7 .With shield or other protective 3.14 ..Radio wave means (e.g., meteorite shield, 3.15 .Automatic guidance insulation, radiation/plasma 3.16 ..Optical (includes infrared) shield) 3.17 ...Optical correlation 171.8 ..Active thermal control 3.18 ...Celestial navigation 171.9 .With special crew accommodations 3.19 ..Radio wave 172.1 ..Emergency rescue means (e.g., escape pod) 3.2 ..Inertial 172.2 .With fuel system details 3.21 ..Attitude control mechanisms 172.3 ..Fuel tank arrangement 3.22 ...Fluid reaction type 172.4 .Rendezvous or docking 3.23 .Stabilized by rotation 172.5 ..Including satellite servicing 3.24 .Externally mounted stabilizing appendage (e.g., fin) 172.6 .With deployable appendage 3.25 ..Removable 172.7 .With solar panel 3.26 ..Sliding 172.8 ..Having solar concentrator 3.27 ..Collapsible 172.9 ..Having launch hold down means 3.28 ...Longitudinally rotating 173.1 .With payload accommodation 3.29 ...Radially rotating -

(12) United States Patent (10) Patent No.: US 7,104.498 B2 Englar Et Al
USOO7104498B2 (12) United States Patent (10) Patent No.: US 7,104.498 B2 Englar et al. (45) Date of Patent: Sep. 12, 2006 (54) CHANNEL-WING SYSTEM FOR THRUST 2,665,083. A 1, 1954 Custer ....................... 244, 12.6 DEFLECTION AND FORCE/MOMENT 2,687.262 A 8, 1954 Custer GENERATION 2.691,494. A * 10, 1954 Custer ....................... 244, 12.6 2,885,160 A * 5/1959 Griswold, II ............... 244,207 (75) Inventors: Robert J. Englar, Marietta, GA (US); 2.937,823 A * 5/1960 Fletcher ..................... 244, 12.6 Dennis M. Bushnell, Hayes, VA (US) (73) Assignee: Georgia Tech Research Corp., Atlanta, (Continued) GA (US) Primary Examiner Peter M. Poon Assistant Examiner Jia Qi (Josh) Zhou (*) Notice: Subject to any disclaimer, the term of this (74) Attorney, Agent, or Firm—Thomas, Kayden, patent is extended or adjusted under 35 Horstemeyer & Risley, LLP U.S.C. 154(b) by 111 days. (57) ABSTRACT (21) Appl. No.: 10/867,114 An aircraft comprising a Channel Wing having blown chan (22) Filed: Jun. 14, 2004 nel circulation control wings (CCW) for various functions. The blown channel CCW includes a channel that has a (65) Prior Publication Data rounded or near-round trailing edge. The channel further has US 2005/OO29396 A1 Feb. 10, 2005 a trailing-edge slot that is adjacent to the rounded trailing edge of the channel. The trailing-edge slot has an inlet Related U.S. Application Data connected to a source of pressurized air and is capable of tangentially discharging pressurized air over the rounded (60) Provisional application No. -
Langley Full-Scale-Tunnel Tests of the Custer Channel Wing Airplane
C.,_._SE FI LE RM L53A09 O_ O < o < RESEARCH MEMORANDUM JqF. LANGLEY FULL-SCALE-TUNNEL TESTS OF THE CUSTER CHANNEL WING AIRPLANE By Jerome Pasarnanick Langley Aeronautical Laboratory Langley Field, Va. NATIONAL ADVISORY COMMITTEE FOR AERONAUTICS WASHI NGTON April 7, 1953 .K NACA RM L5ylOg NATIONAL ADVISORY COMMITTEE FOR AERONAUTICS RESEARCH MEMORANDUM LANGUY FuLL-SCALE-"NEL TESTS OF THE CUSTER CHANNEL WING AIRPLANE By Jerome Pasamanick SUMMARY As a part of a research program to study the principles involved in the use of propeller slipstreams and jets to increase lift, an experimental Custer Channel Wing airplane has been tested in the Langley full-scale tunnel to investigate the lift characteristics of a channel-propeller com- bination and the flow phenomena in and about a channel wing. Some of the general stability and control characteristics of the airplane were also studied at tunnel airspeeds from approximately 25 to 40 mph. Emphasis I. was placed on determining the airplane static lift characteristics (zero airspeed) for the basic configuration and for several modifications. The effect of a ground boundary on the airplane static characteristics was investigated by testing the airplane both on the ground and out of the influence of the ground. Photographs of the tuft surveys made to determine the air-flow distribution around the channel and tail surfaces are included. The significant findings of the static tests are summarized briefly as follows : (a) The channel-propeller configuration in the static condition with- out ground effect produced a resultant force inclined 23' upward from the propeller thrust axis. (b) The magnitude of the static resultant force with the propellers operating at about 2,450 rpm (170 horsepower total for both propellers) was approximately 88 percent of the static thrust calculated for these propellers when not in the presence of the channels. -

(12) United States Patent (10) Patent No.: US 9,555,681 B2 Klein (45) Date of Patent: Jan
USO09555681 B2 (12) United States Patent (10) Patent No.: US 9,555,681 B2 Klein (45) Date of Patent: Jan. 31, 2017 (54) TRANSFORMATION METHOD OF HYBRD B64C 3/54: B64C 3/56; B64C TRANSPORTATION VEHICLE FOR 25/04; B64C 25/54: B64C 37/00; B64C GROUND AND AIR, AND HYBRID 2025/003; B64C 3/58; Y02T 50/145 TRANSPORTATION VEHICLE ITSELF (Continued) (75) Inventor: Stefan Klein, Nitra (SK) (56) References Cited (73) Assignee: AEROMOBIL, S.R.O., Bratislava (SK) U.S. PATENT DOCUMENTS 1,793,494 A 2f1931 Lee (*) Notice: Subject to any disclaimer, the term of this 3,029,042 A * 4, 1962 Martin ...................... B6OF 3.00 patent is extended or adjusted under 35 180,119 U.S.C. 154(b) by 142 days. (Continued) (21) Appl. No.: 14/241,239 FOREIGN PATENT DOCUMENTS (22) PCT Filed: Aug. 22, 2012 CH 295.572 A 12/1953 DE 10346189 B3 5, 2005 (86). PCT No.: PCT/SK2O12/OOOO10 (Continued) S 371 (c)(1), (2), (4) Date: Aug. 19, 2014 OTHER PUBLICATIONS PCT International Search Report, Issued in International Applica (87) PCT Pub. No.: WO2013/032409 tion No. PCT/SK2012/000010 dated Dec. 12, 2012. PCT Pub. Date: Mar. 7, 2013 (Continued) (65) Prior Publication Data Primary Examiner — Timothy D Collins US 2015/OO2815O A1 Jan. 29, 2015 Assistant Examiner — Jessica Wong (74) Attorney, Agent, or Firm — Finnegan, Henderson, (30) Foreign Application Priority Data Farabow, Garrett & Dunner LLP. Aug. 30, 2011 (SK) ................................... 5O39-2011 (57) ABSTRACT Aug. 30, 2011 (SK) ............................... 5044-2011 U Transformation method of hybrid transportation vehicle for ground and air includes the following transformation and (51) Int.