REALVIZ Matchmover Full Tutorial
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Uses of Animation 1
The Uses of Animation 1 1 The Uses of Animation ANIMATION Animation is the process of making the illusion of motion and change by means of the rapid display of a sequence of static images that minimally differ from each other. The illusion—as in motion pictures in general—is thought to rely on the phi phenomenon. Animators are artists who specialize in the creation of animation. Animation can be recorded with either analogue media, a flip book, motion picture film, video tape,digital media, including formats with animated GIF, Flash animation and digital video. To display animation, a digital camera, computer, or projector are used along with new technologies that are produced. Animation creation methods include the traditional animation creation method and those involving stop motion animation of two and three-dimensional objects, paper cutouts, puppets and clay figures. Images are displayed in a rapid succession, usually 24, 25, 30, or 60 frames per second. THE MOST COMMON USES OF ANIMATION Cartoons The most common use of animation, and perhaps the origin of it, is cartoons. Cartoons appear all the time on television and the cinema and can be used for entertainment, advertising, 2 Aspects of Animation: Steps to Learn Animated Cartoons presentations and many more applications that are only limited by the imagination of the designer. The most important factor about making cartoons on a computer is reusability and flexibility. The system that will actually do the animation needs to be such that all the actions that are going to be performed can be repeated easily, without much fuss from the side of the animator. -

Columbia Photographic Images and Photorealistic Computer Graphics Dataset
Columbia Photographic Images and Photorealistic Computer Graphics Dataset Tian-Tsong Ng, Shih-Fu Chang, Jessie Hsu, Martin Pepeljugoski¤ fttng,sfchang,[email protected], [email protected] Department of Electrical Engineering Columbia University ADVENT Technical Report #205-2004-5 Feb 2005 Abstract Passive-blind image authentication is a new area of research. A suitable dataset for experimentation and comparison of new techniques is important for the progress of the new research area. In response to the need for a new dataset, the Columbia Photographic Images and Photorealistic Computer Graphics Dataset is made open for the passive-blind image authentication research community. The dataset is composed of four component image sets, i.e., the Photorealistic Com- puter Graphics Set, the Personal Photographic Image Set, the Google Image Set, and the Recaptured Computer Graphics Set. This dataset, available from http://www.ee.columbia.edu/trustfoto, will be for those who work on the photographic images versus photorealistic com- puter graphics classi¯cation problem, which is a subproblem of the passive-blind image authentication research. In this report, we de- scribe the design and the implementation of the dataset. The report will also serve as a user guide for the dataset. 1 Introduction Digital watermarking [1] has been an active area of research since a decade ago. Various fragile [2, 3, 4, 5] or semi-fragile watermarking algorithms [6, 7, 8, 9] has been proposed for the image content authentication and the detection of image tampering. In addition, authentication signature [10, ¤This work was done when Martin spent his summer in our research group 1 11, 12, 13] has also been proposed as an alternative image authentication technique. -

2020 Croner Animation Position Grids.Xlsx
Survey Position Grids STORY / VISUAL DEVELOPMENT ANIMATION Family 200 210 220 230 240 250 260 280 300 Production TV Animation / Character Visual Character Level Story Design / Art Pre-Visualization Modeling Layout Shorts Design Development Animation Direction Executive Management 12 Head of Production Management Generates and Manages the Creates the look Creates characters Creates and Creates sequences of Creates, builds and Creates 3D layouts. Defines, leads and 14 Head of Animation Studio develops story ideas, animation process of and artistic to meet established presents concepts shots that convey the maintains models Translates sketches into 3D executes major 16 Top Creative Executive sequences, an animated deliverables to vision for the and designs for the story through the of story elements, layouts and shot sequences character animation storyboards, television or short film meet the artistic, production, production, including application of traditional including and scenes. May create for productions, elements and production, ensuring creative and including look, character, sets, filmmaking principles in characters, sets and scenes. including personality Brief Job Family Descriptions enhancements that the creative aesthetic vision of personality, lighting, props, key a 3D computer graphics environments, Determines camera and animation style. throughout desires, as well as a production. movement, art. Creates plan environment. elements, sets, placement, blocks production. production expression. views and blue structures. characters, -

A Process of Seamlessly Replacing Cg Elements Into Live-Action Footage
1st Annual International Interdisciplinary Conference, AIIC 2013, 24-26 April, Azores, Portugal - Proceedings- A PROCESS OF SEAMLESSLY REPLACING CG ELEMENTS INTO LIVE-ACTION FOOTAGE Jin Zhi Duncan of Jordanstone College of Art & Design, United Kingdom Abstract: This research focused on inserting a computer-generated element into live-action footage and replacing unwanted existing objects in the footage. In addition, creating a realistic and seamless visual representation in the field of digital compositing. The purpose of this paper is to cover a detailed working process of digital compositing in order to clarify the production process and provide a clear idea for those entry-level artists to improve an overall understanding of the digital compositing and visual effects and hopefully inspire further collaboration and participants particularly between academia and industry. Key Words: Digital compositing, CG elements, Realistic, Visual effects Introduction Along with the increase of digital compositing in feature films, the role of digital compositors has become of unprecedented importance. Compositors thus sit at the core of most image manipulation pipelines. In order to meet the needs of the visual effects industry, universities, art and film schools have established relevant professional courses in recent years. Nevertheless, current educational concepts still need to promote a sound scientific understanding in order to steer entry- level visual effects artists in the right direction. This study has addressed several main factors from the perspective of theory and practice. As a general discussion, the research briefly outlines the historical perspectives of digital compositing, and continues to investigate the current situation of the digital compositing and visual effects industry. -

New Mode of Cinema V1n1
New Mode of Cinema: How Digital Technologies are Changing Aesthetics and Style Kristen M. Daly, Columbia University, New York Abstract This article delves intrinsically into how the characteristics of digital cinema, its equipment, software and processes, differ from film and therefore afford new aesthetic and stylistic modes, changing the nature of mise-en-scène and the language of cinema as it has been defined in the past. Innovative filmmakers are exploring new aesthetic and stylistic possibilities as the encumbrances of film, which delimited a certain mode of cinema, are released. The article makes the case that the camera as part of a computer system has enabled a more cooperative relationship with the filmmaker going beyond Alexandre Astruc’s prediction of the camera-pen (camére-stylo) to become a camera-computer. The technology of digital cinema makes the natural indexicality of film and the cut simply options amongst others and permits new forms of visual aesthetics not premised on filmic norms, but based on other familiar audiovisual forms like video games and computer interface. Voir le résumé français à la fin de l’article ***** “We see in them, if you like, something of the prophetic. That’s why I am talking about avant-garde. There is always an avant-garde when something new takes place . .” (Astruc, 1948, 17) In this article, I will examine some of the material qualities and characteristics of the equipment, software and processes of digital cinema production and propose how these afford a new aesthetics and style for cinema. Of course, many styles are available, including the status quo. -

HP and Autodesk Create Stunning Digital Media and Entertainment with HP Workstations
HP and Autodesk Create stunning digital media and entertainment with HP Workstations. Does your workstation meet your digital Performance: Advanced compute and visualization power help speed your work, beat deadlines, and meet expectations. At the heart of media challenges? HP Z Workstations are the new Intel® processors with advanced processor performance technologies and NVIDIA Quadro professional It’s no secret that the media and entertainment industry is constantly graphics cards with the NVIDIA CUDA parallel processing architecture; evolving, and the push to deliver better content faster is an everyday delivering real-time previewing and editing of native, high-resolution challenge. To meet those demands, technology matters—a lot. You footage, including multiple layers of 4K video. Intel® Turbo Boost1 need innovative, high-performing, reliable hardware and software tools is designed to enhance the base operating frequency of processor tuned to your applications so your team can create captivating content, cores, providing more processing speed for single and multi-threaded meet tight production schedules, and stay on budget. HP offers an applications. The HP Z Workstation cooling design enhances this expansive portfolio of integrated workstation hardware and software performance. solutions designed to maximize the creative capabilities of Autodesk® software. Together, HP and Autodesk help you create stunning digital Reliability: HP product testing includes application performance, media. graphics and comprehensive ISV certification for maximum productivity. All HP Workstations come with a limited 3-year parts, 3-year labor and The HP Difference 3-year onsite service (3/3/3) standard warranty that is extendable up to 5 years.2 You can be confident in your HP and Autodesk solution. -

Maaston Mallintaminen Visualisointikäyttöön
MAASTON MALLINTAMINEN VISUALISOINTIKÄYTTÖÖN LAHDEN AMMATTIKORKEAKOULU Tekniikan ala Mediatekniikan koulutusohjelma Teknisen Visualisoinnin suuntautumisvaihtoehto Opinnäytetyö Kevät 2012 Ilona Moilanen Lahden ammattikorkeakoulu Mediatekniikan koulutusohjelma MOILANEN, ILONA: Maaston mallintaminen visualisointikäyttöön Teknisen Visualisoinnin suuntautumisvaihtoehdon opinnäytetyö, 29 sivua Kevät 2012 TIIVISTELMÄ Maastomallit ovat yleisesti käytössä peli- ja elokuvateollisuudessa sekä arkkitehtuurisissa visualisoinneissa. Mallinnettujen 3D-maastojen käyttö on lisääntynyt sitä mukaa, kun tietokoneista on tullut tehokkaampia. Opinnäytetyössä käydään läpi, millaisia maastonmallintamisen ohjelmia on saatavilla ja osa ohjelmista otetaan tarkempaan käsittelyyn. Opinnäytetyössä käydään myös läpi valittujen ohjelmien hyvät ja huonot puolet. Tarkempaan käsittelyyn otettavat ohjelmat ovat Terragen- sekä 3ds Max - ohjelmat. 3ds Max-ohjelmassa käydään läpi maaston luonti korkeuskartan ja Displace modifier -toiminnon avulla, sekä se miten maaston tuominen onnistuu Google Earth-ohjelmasta Autodeskin tuotteisiin kuten 3ds Max:iin käyttäen apuna Google Sketchup -ohjelmaa. Lopuksi vielä käydään läpi ohjelmien hyvät ja huonot puolet. Casessa mallinnetaan maasto Terragen-ohjelmassa sekä 3ds Max- ohjelmassa korkeuskartan avulla ja verrataan kummalla mallintaminen onnistuu paremmin. Maasto mallinnettiin valituilla ohjelmilla ja käytiin läpi saatavilla olevia maaston mallinnusohjelmia. Lopputuloksena päädyttiin, että valokuvamaisen lopputuloksen saamiseksi Terragen -

´Anoq of the Sun Detailed CV As a Graphics Artist
Anoq´ of the Sun Detailed CV as a Graphics Artist Anoq´ of the Sun, Hardcore Processing ∗ January 31, 2010 Online Link for this Detailed CV This document is available online in 2 file formats: • http://www.anoq.net/music/cv/anoqcvgraphicsartist.pdf • http://www.anoq.net/music/cv/anoqcvgraphicsartist.ps All My CVs and an Overview All my CVs (as a computer scientist, musician and graphics artist) and an overview can be found at: • http://www.hardcoreprocessing.com/home/anoq/cv/anoqcv.html Contents Overview Employment, Education and Skills page 2 ProjectList page 3 ∗ c 2010 Anoq´ of the Sun Graphics Related Employment and Education Company My Role Dates Duration 1 day=7.5 hrs HardcoreProcessing GraphicsArtist 1998-now (seeproject list) I founded this company Pre-print December 1998 Marketing www.hardcoreprocessing.com Anoq´ Music Graphics Artist 2007-now (see project list) I founded this record label Pre-print December 2007 Marketing www.anoq.net/music/label CasperThorsøeVideo Production 3DGraphicsArtist 1997-1998 1year www.ctvp.com (Partly System Administrator) Visionik Worked Partly as a 1997 5 months www.visionik.dk Graphics Artist (not full-time graphics!) List of Graphics Related Skills (Updated on 2010-01-31) (Years Are Not Full-time Durations, But Years with Active Use) Key for ”Level”: 1: Expert, 2: Lots of Routine, 3: Routine, 4: Good Knowledge, 5: Some Knowledge Skill Name / Group Doing What Level Latest Years with (1-5) Use Active Use Graphics Software and Equipment: Alias|Wavefront PowerAnimator Modelling, Animation 2 1998 1 Alias|Wavefront Maya Modelling, Animation 2 1998 1 LightWave 3D Modelling, Animation 2 1997 4 SoftImage 3D Modelling, Animation 5 1998 0.2 3D Studio MAX Modelling, Animation 5 1997 0.5 Blue Moon Rendering Tools (a.k.a. -

3D Compositing and Visual Effects ITP 360X (3 Units)
3D Compositing and Visual Effects ITP 360x (3 Units) Fall 2010 Objective Advanced techniques for 3D animation and visual effects development; including 3D pre-visualization, match moving, dynamics, multi-pass rendering, and digital compositing. Concepts Camera and advanced photographic applications for 3D including: Camera tracking and match moving, high dynamic range image making, image based lighting, and global illumination. Advanced materials, lighting, and rendering techniques. Multi-pass rendering and node based compositing. Film, video, and chroma-keying for 3D. Pre-visualization and pipeline planning techniques. 3D asset creation, photorealistic texturing, and asset management. Color correction, optical effects, and advanced compositing. In addition to a series of weekly assignments, students will apply their knowledge to a final capstone project. Prerequisites ITP 215x Instructor Lance S. Winkel Contacting the E-mail: [email protected] Instructor Tel: 213.740.9956 Office Hours Varies by semester Lab Assistants TBA Class Meeting 3 hours / week. Lecture and hands on lab combined. Course The course material will be structured around a series of projects. Structure Each project will extend over several weeks with assignments / progress checks due each week. See the Grading criteria below. The anticipated Course Outline contains a weekly breakdown of the lecture material and assignment due dates. Required Digital Lighting and Rendering (2nd Edition) (Paperback) Textbooks Jeremy Birn, (ISBN: 978-0321316318) Compositing Visual Effects -

Jean Claude Nouchy :: Curriculum Vitae – 2020 (Experienced Houdini Teacher, VFX TD/Lead, VFX/On-Set Supervisor) :: Page 1 Date
Jean Claude Nouchy :: Curriculum vitae – 2020 (Experienced Houdini Teacher, V ! T"#$ead, V !#on%&et &upervi&or' :: (a)e * date o+ ,irth : -pril,*2th, *./0 citi1en&hip : 2talian current re&idence: $ondon, 3nited 4in)dom lan)ua)e& : luent: talian, En)li&h, rench5 6a&ic: 7pani&h5 :::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::: pro+e&&ional Experience : 20*.#(re&ent Jelly+i&h (icture& $T" – $ondon – C !# !#Cro8d& 7upervi&or "ream8or9&: Ho8 to Train your "ra)on, Homecomin) – $ead ! (-mmy -8ard Nominated' :undi&clo&ed; :in pro)re&&; % C !# !#Cro8d& 7upervi&or 2o*<#pre&ent – Vi&ual Cortex $a, $T" – $ondon – ounder Vi&ual Cortex $a, +ocu&e& on the creation o+ Vi&ual E++ect& +or movie& and commercial& and the advanced trainin) +or pro+e&&ional& and &chool &tudent& o+ the (7ide !' Houdini =" &o+t8are ## >ith 20 year& o+ teachin) experience, previou&ly 7o+tima)e, 2 have ,een actively involved in Teachin) Houdini in the +ollo8in) &chool& and 3niver&itie&, and V ! ,outi?ue& in the la&t &everal year&, includin): -ccaEdi – @ilan – 2taly (20*.' Vi ! 7chool – Thiene – 2taly (20*A%20*B' Event Hori1on 7chool – Turin – 2taly (20*B%20*B' $a7alle 3niver&ity – 6arcelona – 7pain (20*/%20*B' @y4ey 7tudio& – @ilano 2taly (20*=%20*0' ramea&tore – $ondon – 3nited 4in)dom Co++ee and TV – $ondon – 3nited 4in)dom Came7y& – $ondon – 3nited 4in)dom De,ellion Came& – Ex+ord – 3nited 4in)dom 74F 7port – 2&le8orth – 3nited 4in)dom 20*. – Creat V ! – $ondon – 7enior 7imulatio ! T" E@EC-: ! T", =A0 proGected proGect includin) )rain, li?uid&, volume& &imulation&5 20*B#20*. -
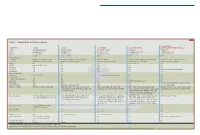
Table 1. Visualization Software Features
Table 1. Visualization Software Features INFORMATIX COMPANY ALIAS ALIAS AUTODESK AUTO•DES•SYS SOFTWARE INTERNATIONAL Product ALIAS IMAGESTUDIO STUDIOTOOLS 11 AUTODESK VIZ 2005 FORM.Z 4.5 PIRANESI 3 E-mail [email protected] [email protected] Use website form [email protected] [email protected] Web site www.alias.com www.alias.com www.autodesk.com www.formz.com www.informatix.co.uk Price $3,999 Starts at $7,500 $1,995 $1,495 $750 Operating systems Supported Windows XP/2000 Professional Windows XP/2000 Professional, SGI IRIX Windows 2000/XP Windows 98/NT/XP/ME/2000, Macintosh 9/X Windows 98 and later, Macintosh OS X Reviewed Windows XP Professional SP1 Windows XP Professional SP1 Windows XP Professional SP1 Windows XP Professional SP1 Windows XP Professional SP1 Modeling None Yes Yes Solid and Surface N/A NURBS Imports NURBS models Yes Yes Yes N/A Refraction Yes Yes Yes Yes N/A Reflection Yes Yes Yes Yes By painting with a generated texture Anti-aliasing Yes Yes Yes Yes N/A Rendering methods Radiosity Yes, Final Gather No Yes, and global illumination/caustics Yes N/A* Ray-tracing Yes Yes Yes Yes N/A* Shade/render (Gouraud) Yes Yes Yes Yes N/A* Animations No† Yes Yes Walkthrough, Quicktime VR N/A Panoramas Yes Yes Yes Yes Can paint cubic panorams and create .MOV files Base file formats AIS Alias StudioTools .wire format MAX FMZ EPX, EPP (panoramas) Import file formats StudioTools (.WIRE), IGES, Maya IGES, STEP, DXF, PTC Granite, CATIA V4/V5, 3DS, AI, XML, DEM, DWG, DXF, .FBX, 3DGF, 3DMF, 3DS, Art*lantis, BMP, DWG EPX, EPP§; Vedute: converts DXF, 3DS; for plans UGS, VDAFS, VDAIS, JAMA-IS, DES, OBJ, EPS IGES, LS, .STL, VWRL, Inventor (installed) DXF, EPS, FACT, HPGL, IGES, AI, JPEG, Light- and elevations; JPG, PNG, TIF, raster formats AI, Inventor, ASCII Scape, Lightwave, TIF, MetaFo;e. -

Department of Media Sciences Anna University, Chennai
DEPARTMENT OF MEDIA SCIENCES ANNA UNIVERSITY, CHENNAI VISION To offer quality media studies and research, using state-of-the-art images for building an inter-disciplinary knowledge base, so as to contribute to development and democracy. To produce creative and technically apt professionals for the media industry. The theoretical and practical media courses taught in the PG programme will improve, explore, innovate and implement core media techniques by “learn by doing” philosophy. The PG programme will continue to prepare students for professional and personal success in today’s exciting and innovative media landscape. MISSION To create an enabling environment to nurture ideas, freedom of expression, creativity and scholarship, and develop leaders in the arena of media and mass communication. The mission of the PG programme is to excel in media education on fundamental media concepts, values and skills in various platforms that focus on problem solving, critical thinking, innovation and communications. To promote the understanding of ethical and legal implication of all forms of media and the importance of cultural and intellectual diversity, techno-savvy, civic engagement and social responsibility in preparing the students for leadership role in media industry. To enable students to understand the role of media in nation building. To instill a sense by creating and innovation among journal minds for better societal contribution. 1 ANNA UNIVERSITY, CHENNAI UNIVERSITY DEPARTMENTS M. Sc. ELECTRONIC MEDIA (2 YEARS) REGULATIONS – 2019 CHOICE BASED CREDIT SYSTEM 1. PROGRAMME EDUCATIONAL OBJECTIVES (PEOs): 1. Find gainful employment in media and entertainment industry. 2. Enter into higher studies leading to research degrees and advanced specialization.