Deepble: Generalizing RSSI-Based Localization Across Different Devices
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Anurag Sharma | 1 © Vivekananda International Foundation Published in 2021 by Vivekananda International Foundation
Anurag Sharma | 1 © Vivekananda International Foundation Published in 2021 by Vivekananda International Foundation 3, San Martin Marg | Chanakyapuri | New Delhi - 110021 Tel: 011-24121764 | Fax: 011-66173415 E-mail: [email protected] Website: www.vifindia.org Follow us on Twitter | @vifindia Facebook | /vifindia All Rights Reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form, or by any means electronic, mechanical, photocopying, recording or otherwise without the prior permission of the publisher. Anurag Sharma is a Research Associate at Vivekananda International Foundation (VIF). He has completed MPhil in Politics and International Relations on ‘International Security’ at the Dublin City University in Ireland, in 2018. His thesis is titled as “The Islamic State Foreign Fighter Phenomenon and the Jihadi Threat to India”. Anurag’s main research interests are terrorism and the Internet, Cybersecurity, Countering Violent Extremism/Online (CVE), Radicalisation, Counter-terrorism and Foreign (Terrorist) Fighters. Prior to joining the Vivekananda International Foundation, Anurag was employed as a Research Assistant at Institute for Conflict Management. As International affiliations, he is a Junior Researcher at TSAS (The Canadian Network for Research on Terrorism, Security, And Society) in Canada; and an Affiliate Member with AVERT (Addressing Violent Extremism and Radicalisation to Terrorism) Research Network in Australia. Anurag Sharma has an MSc in Information Security and Computer Crime, major in Computer Forensic from University of Glamorgan (now University of South Wales) in United Kingdom and has an online certificate in ‘Terrorism and Counterterrorism’ from Leiden University in the Netherlands, and an online certificate in ‘Understanding Terrorism and the Terrorist Threat’ from the University of Maryland, the United States. -

Prohibited Agreements with Huawei, ZTE Corp, Hytera, Hangzhou Hikvision, Dahua and Their Subsidiaries and Affiliates
Prohibited Agreements with Huawei, ZTE Corp, Hytera, Hangzhou Hikvision, Dahua and their Subsidiaries and Affiliates. Code of Federal Regulations (CFR), 2 CFR 200.216, prohibits agreements for certain telecommunications and video surveillance services or equipment from the following companies as a substantial or essential component of any system or as critical technology as part of any system. • Huawei Technologies Company; • ZTE Corporation; • Hytera Communications Corporation; • Hangzhou Hikvision Digital Technology Company; • Dahua Technology company; or • their subsidiaries or affiliates, Entering into agreements with these companies, their subsidiaries or affiliates (listed below) for telecommunications equipment and/or services is prohibited, as doing so could place the university at risk of losing federal grants and contracts. Identified subsidiaries/affiliates of Huawei Technologies Company Source: Business databases, Huawei Investment & Holding Co., Ltd., 2017 Annual Report • Amartus, SDN Software Technology and Team • Beijing Huawei Digital Technologies, Co. Ltd. • Caliopa NV • Centre for Integrated Photonics Ltd. • Chinasoft International Technology Services Ltd. • FutureWei Technologies, Inc. • HexaTier Ltd. • HiSilicon Optoelectronics Co., Ltd. • Huawei Device Co., Ltd. • Huawei Device (Dongguan) Co., Ltd. • Huawei Device (Hong Kong) Co., Ltd. • Huawei Enterprise USA, Inc. • Huawei Global Finance (UK) Ltd. • Huawei International Co. Ltd. • Huawei Machine Co., Ltd. • Huawei Marine • Huawei North America • Huawei Software Technologies, Co., Ltd. • Huawei Symantec Technologies Co., Ltd. • Huawei Tech Investment Co., Ltd. • Huawei Technical Service Co. Ltd. • Huawei Technologies Cooperative U.A. • Huawei Technologies Germany GmbH • Huawei Technologies Japan K.K. • Huawei Technologies South Africa Pty Ltd. • Huawei Technologies (Thailand) Co. • iSoftStone Technology Service Co., Ltd. • JV “Broadband Solutions” LLC • M4S N.V. • Proven Honor Capital Limited • PT Huawei Tech Investment • Shanghai Huawei Technologies Co., Ltd. -

Celulares Importados
27/04/2020 CELULARES IMPORTADOS (80) |___ ACER |___ ACTECK |___ ALCATEL |___ AOC |___ APPLE (4) |___ BLACKBERRY (1) |___ BLU |___ DELL |___ HONOR (1) |___ HP |___ HTC (1) |___ HUAWEI (11) |___ INFINIX |___ LANIX |___ LAVA |___ LENOVO |___ LG (3) |___ MICROSOFT (1) |___ MOTOROLA (17) |___ NOKIA (4) |___ SAMSUNG (21) |___ SONY |___ SONY ERICSSON |___ TECHPAD |___ TP-LINK (2) |___ TREO |___ VORAGO |___ XIAOMI (14) CELULARES TELCEL |___ ACER |___ APPLE |___ ALCATEL |___ BENQ SIEMENS |___ BIRD |___ BLACKBERRY |___ HAIER |___ HTC |___ HUAWEI Pagina 1/117 27/04/2020 |___ I-MOBIL |___ LANIX |___ LENOVO |___ LG |___ MICROSOFT |___ MOMENTUM |___ MOTOROLA |___ M4TEL |___ NOKIA |___ NYX |___ OTROS |___ PANASONIC |___ PANTECH |___ POLAROID |___ SAGEM |___ SAMSUNG |___ SENDO |___ SKYZEN |___ SONY |___ SONY ERICSSON |___ TCL |___ TREO |___ TELIT |___ ZONDA |___ ZTE ACCESORIOS Y MAS |___ ALMACENANAJE |___ AUDIO Y VIDEO |___ CAMARA |___ CAMARAS |___ CARTUCHOS DE LIMPIEZA |___ CD-DVD |___ COMPUTADORA |___ CONTROLES |___ CONVERTIDORES |___ DESKTOP |___ DISCOS DUROS |___ DISPOSITIVOS A-V |___ DISPOSITIVOS AUDIO |___ ENERGIA |___ EQUIPO ELECTRICO Pagina 2/117 27/04/2020 |___ EQUIPO RACK |___ ESCRITORIO |___ GABINETES |___ HERRAMIENTAS |___ I/O TARJETAS |___ JUEGOS |___ MATERIAL DE OFICINA |___ MEMORIA |___ MEMORIA FLASH |___ MONITOR Y TV |___ MONITORES |___ MUSICA |___ NOTEBOOK |___ OTROS |___ PANTALLAS |___ PDA |___ PIZARRAS BLANCAS |___ PORTATIL |___ PROTECCION DE ENERGIA |___ PROYECTOR |___ RUTEADORES |___ SWITCH |___ SWITCHING |___ TARJETAS |___ TARJETAS -

Undersampled Pulse Width Modulation for Optical Camera Communications
Undersampled Pulse Width Modulation for Optical Camera Communications Pengfei Luo1, Tong Jiang1, Paul Anthony Haigh2, Zabih Ghassemlooy3,3a, Stanislav Zvanovec4 1Research Department of HiSilicon, Huawei Technologies Co., Ltd, Beijing, China E-mail: {oliver.luo, toni.jiang}@hisilicon.com 2Department of Electronic and Electrical Engineering, University College London, London, UK Email: [email protected] 3Optical Communications Research Group, NCRLab, Faculty of Engineering and Environment, Northumbria University, Newcastle-upon-Tyne, UK 3aQIEM, Haixi Institutes, Chinese Academy of Sciences, Quanzhou, China Email: [email protected] 4Department of Electromagnetic Field, Faculty of Electrical Engineering, Czech Technical University in Prague, 2 Technicka, 16627 Prague, Czech Republic Email: [email protected] Abstract—An undersampled pulse width modulation (UPWM) According to the Nyquist sampling theorem, if these FRs are scheme is proposed to enable users to establish a non-flickering adopted for sampling, the transmitted symbol rate Rs must be optical camera communications (OCC) link. With UPWM, only a lower than half the sampling rate. However, this will clearly digital light emitting diode (LED) driver is needed to send signals lead to light flickering due to the response time of the human using a higher order modulation. Similar to other undersample- eye. Therefore, a number of techniques have been proposed to based modulation schemes for OCC, a dedicated preamble is support non-flickering OCC using low speed cameras (e.g., ≤ required to assist the receiver to indicate the phase error 60 fps). More precisely, there are three main modulation introduced during the undersampling process, and to compensate categories for LFR-based OCC using both global shutter (GS) for nonlinear distortion caused by the in-built gamma correction and rolling shutter (RS) digital cameras: i) display-based [3], ii) function of the camera. -
Hi3519a V100 4K Smart IP Camera Soc Breif Data Sheet
Hi3519A V100 4K Smart IP Camera SoC Breif Data Sheet Issue 02 Date 2018-06-20 Copyright © HiSilicon Technologies Co., Ltd. 2018. All rights reserved. No part of this document may be reproduced or transmitted in any form or by any means without prior written consent of HiSilicon Technologies Co., Ltd. Trademarks and Permissions , , and other HiSilicon icons are trademarks of HiSilicon Technologies Co., Ltd. All other trademarks and trade names mentioned in this document are the property of their respective holders. Notice The purchased products, services and features are stipulated by the contract made between HiSilicon and the customer. All or part of the products, services and features described in this document may not be within the purchase scope or the usage scope. Unless otherwise specified in the contract, all statements, information, and recommendations in this document are provided "AS IS" without warranties, guarantees or representations of any kind, either express or implied. The information in this document is subject to change without notice. Every effort has been made in the preparation of this document to ensure accuracy of the contents, but all statements, information, and recommendations in this document do not constitute a warranty of any kind, express or implied. HiSilicon Technologies Co., Ltd. Address: New R&D Center, Wuhe Road, Bantian, Longgang District, Shenzhen 518129 P. R. China Website: http://www.hisilicon.com Email: [email protected] HiSilicon Proprietary and Confidential Issue 02 (2018-06-20) 1 Copyright © HiSilicon Technologies Co., Ltd. Hi3519A V100 Hi3519A V100 4K Smart IP Camera SoC Introduction Key Features Hi3519A V100 is a high-performance and low-power 4K Low Power Smart IP Camera SoC designed for IP cameras, action cameras, 1.9 W power consumption in a typical scenario for 4K x panoramic cameras, rear view mirrors, and UAVs. -

Analyzing Android GNSS Raw Measurements Flags Detection
Analyzing Android GNSS Raw Measurements Flags Detection Mechanisms for Collaborative Positioning in Urban Environment Thomas Verheyde, Antoine Blais, Christophe Macabiau, François-Xavier Marmet To cite this version: Thomas Verheyde, Antoine Blais, Christophe Macabiau, François-Xavier Marmet. Analyzing Android GNSS Raw Measurements Flags Detection Mechanisms for Collaborative Positioning in Urban Envi- ronment. ICL-GNSS 2020 International Conference on Localization and GNSS, Jun 2020, Tampere, Finland. pp.1-6, 10.1109/ICL-GNSS49876.2020.9115564. hal-02870213 HAL Id: hal-02870213 https://hal-enac.archives-ouvertes.fr/hal-02870213 Submitted on 17 Jun 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Analyzing Android GNSS Raw Measurements Flags Detection Mechanisms for Collaborative Positioning in Urban Environment Thomas Verheyde, Antoine Blais, Christophe Macabiau, François-Xavier Marmet To cite this version: Thomas Verheyde, Antoine Blais, Christophe Macabiau, François-Xavier Marmet. Analyzing Android GNSS Raw Measurements Flags Detection Mechanisms -

Hi3798m V200 Brief Data Sheet
Hi3798M V200 Hi3798M V200 Brief Data Sheet Key Specifications Processor Security Processing Multi-core 64-bit high-performance ARM Cortex Advanced CA and downloadable CA A53 DRM Multi-core high-performance GPU Secure boot, secure storage, and secure upgrade Memory Control Interfaces Graphics and Display Processing (Imprex 2.0 DDR3/4 interface Processing Engine) eMMC/NOR/NAND flash interface Multiple HDR formats Video Decoding (HiVXE 2.0 Processing Engine) 3D video processing and display Maximum 4K x 2K@60 fps 10-bit decoding 2D graphics acceleration engine Multiple decoding formats, including Audio and Video Interfaces H.265/HEVC, AVS, H.264/AVC MVC, MPEG-1/2/4, VC-1, and so on HDMI 2.0b output Analog video interface Image Decoding Digital and analog audio interfaces Full HD JPEG and PNG hardware decoding Peripheral Interfaces Video and Image Encoding GE and FE network ports 1080p@30 fps video encoding Multiple USB ports Audio Encoding and Decoding SDIO, UART, SCI, IR, KeyLED, and I2C interfaces Audio decoding in multiple formats Audio encoding in multiple formats Others DVB Interface Ultra-low-power design with less than 30 mW standby power consumption Multi-channel TS inputs and outputs BGA package Solution Is targeted for the DVB/Hybrid STB market. Complies with the broadcasting television-level Supports full 4K decoding. picture quality standards. Supports Linux, Android, and TVOS intelligent Metes the increasing value-added service operating systems requirements. Copyright © HiSilicon (Shanghai) Technologies -

Ksix Lite Folio Case with Standing for Honor 20, Huawei Nova 5T Black Description
. KSIX LITE FOLIO CASE WITH STANDING FOR HONOR 20, HUAWEI NOVA 5T BLACK DESCRIPTION . The perfect fusion of elegant and safe The Lite Folio Case is an elegant and safe accessory. This folio case is made of simil leather and has an inner slot to store a credit card or ID card. Its standing mode allows to play, read and enjoy multimedia content in a very comfortable way. Book aperture design The Lite Folio Case has a lid that keeps the smartphones screen protected all the time, while the inner cover ensures an extra protection for the corners and edges. It incorporates and inner slot to carry a credit card o ID card. Standing mode The standing mode is perfect to play, read and enjoy multimedia content with a comfortable angle of view. Ultra-thin The Lite Folio Case is ultra-thin. It keeps the smartphone protected without adding it any weight or volume. Mani features It presents a book aperture design It has an inner cover for a perfect adjustment It has an inner slot to carry a credit or ID card Its standing mode is perfect to play, read and enjoy multimedia content with a comfortable angle of view It wont add weight or volume to the smartphone Technical specifications It is made of simil leather Elegant design Book aperture design Inner slot to carry a credit or ID card Standing mode Strategic holes on the top to make and hear ringtones Allows full access to camera functions, buttons and ports TECHNICAL SPECIFICATIONS. Compatiblidad (modelo) Simil leather Color Black Rigidity Rigid Model compatibility 20, Nova 5T Brand compatibility Honor, Huawei STRENGTHS REF. -
Hi3559a V100 Ultra-HD Mobile Camera Soc Breif Data Sheet
Hi3559A V100 ultra-HD Mobile Camera SoC Brief Data Sheet Issue 01 Date 2017-10-30 Copyright © HiSilicon Technologies Co., Ltd. 2017. All rights reserved. No part of this document may be reproduced or transmitted in any form or by any means without prior written consent of HiSilicon Technologies Co., Ltd. Trademarks and Permissions , , and other HiSilicon icons are trademarks of HiSilicon Technologies Co., Ltd. All other trademarks and trade names mentioned in this document are the property of their respective holders. Notice The purchased products, services and features are stipulated by the contract made between HiSilicon and the customer. All or part of the products, services and features described in this document may not be within the purchase scope or the usage scope. Unless otherwise specified in the contract, all statements, information, and recommendations in this document are provided "AS IS" without warranties, guarantees or representations of any kind, either express or implied. The information in this document is subject to change without notice. Every effort has been made in the preparation of this document to ensure accuracy of the contents, but all statements, information, and recommendations in this document do not constitute a warranty of any kind, express or implied. HiSilicon Technologies Co., Ltd. Address: New R&D Center, Wuhe Road, Bantian, Longgang District, Shenzhen 518129 P. R. China Website: http://www.hisilicon.com Email: [email protected] Hi3559A V100 Hi3559A V100 Ultra-HD Mobile Camera SoC Brief Data Sheet Introduction Key Features Hi3559A V100 is a professional 8K ultra-HD mobile Low Power Consumption camera SoC. It supports 8K30/4K120 digital video recording Typical power consumption of 3 W in 8KP30 (7680 x with broadcast-level picture quality. -
View Document
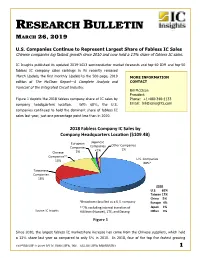
RESEARCH BULLETIN MARCH 26, 2019 U.S. Companies Continue to Represent Largest Share of Fabless IC Sales Chinese companies log fastest growth since 2010 and now hold a 13% share of fabless IC sales. IC Insights published its updated 2019-2023 semiconductor market forecasts and top-40 IDM and top-50 fabless IC company sales rankings in its recently released March Update, the first monthly Update to the 500-page, 2019 MORE INFORMATION edition of The McClean Report—A Complete Analysis and CONTACT Forecast of the Integrated Circuit Industry. Bill McClean President Figure 1 depicts the 2018 fabless company share of IC sales by Phone: +1-480-348-1133 company headquarters location. With 68%, the U.S. Email: [email protected] companies continued to hold the dominant share of fabless IC sales last year, just one percentage point less than in 2010. !"#$%&'()*++%,-./'01%2,%3')*+%(1%% ,-./'01%4*'567'89*8+%:-;'<-0%=>#"?@ABC%% 789&(,)*$ ;)()*,-,$ =>5,9$%&'()*+,-$ %&'()*+,-$ %&'()*+,-$ <40$ 40$ %5+*,-,$ :0$ %&'()*+,-11$ 460$ !"#"$%&'()*+,-$ ./01$ 2)+3)*,-,$ %&'()*+,-$ 4.0$ %%%%%%%!"#"% D@3@%%%%%%%E?F% G'HI'0%#JF% ,KH0'%%%%%LF% 1N9&)F?&'$?E)--+O,F$)-$)$!"#"$?&'()*P$ M78-/*%%%AF% 11C0$,D?E8F+*B$+*>,9*)E$>9)*-G,9-$&G$ N'/'0%%%%%#F% #&89?,@$A%$A*-+B5>-$ O9K*8%%%%%AF% H+#+E+?&*$IH8)3,+JK$L27K$)*F$M)>)*B$$ 1 Figure 1 Since 2010, the largest fabless IC marketshare increase has come from the Chinese suppliers, which held a 13% share last year as compared to only 5% in 2010. In 2018, four of the top five fastest growing COPYRIGHT © 2019 BY IC INSIGHTS, INC. -

Hi3798c V200 Brief Data Sheet
Hi3798C V200 Hi3798C V200 Brief Data Sheet Key Specifications High-Performance CPU z Dolby Digital/Dolby Digital Plus Decoder-Converter z Quad-core 64-bit high-performance ARM Cortex A53, z Dolby True HD decoding 15000 DMIPS z DTS HD and DTS M6 decoding z Integrated multimedia acceleration engine NEON z Dolby Digital/DTS transparent transmission z Hardware Java acceleration z AAC-LC and HE AAC V1/V2 decoding z Integrated hardware floating-point coprocessor z APE, FLAC, Ogg, AMR-NB, and AMR-WB decoding 3D GPU z G.711 (u/a) audio decoding z High-performance multi-core GPU Mali T720 z Dolby MS12 decoding and audio effect z OpenGL ES 3.1/3.0/2.0/1.1/1.0 OpenVG 1.1 z G.711(u/a), AMR-NB, AMR-WB, and AAC-LC audio z OpenCL 1.1/1.2 Full Profile/RenderScipt encoding z Microsoft DirectX 11 FL9_3 z HE-AAC transcoding DD (AC3) z Adaptive scalable texture compression (ASTC) TS Demultiplexing/PVR z Pixel fill rate greater than 2.7 Gpixel/s z Maximum six TS inputs (optional) Memory Control Interfaces z Two TS outputs (multiplexed with two TS inputs) z DDR3/3L/4 SDRAM interface, maximum 32-bit z DVB-CSA/AES/DES descrambling data width z Recording of scrambled and non-scrambled streams z SPI NOR flash interface Security Processing z SPI NAND flash interface z Trusted execution environment (TEE) z NAND flash interface z Secure video path (SVP) − SLC/MLC flash memory z Secure boot − Maximum 64-bit error-correcting code (ECC) z Secure storage z eMMC flash interface z Secure upgrade Video Decoding (HiVXE 2.0 Processing Engine) z Protection for JTAG and other -

Securing Arm Platform: from Software-Based to Hardware-Based Approaches
Wayne State University Wayne State University Dissertations January 2020 Securing Arm Platform: From Software-Based To Hardware-Based Approaches Zhenyu Ning Wayne State University Follow this and additional works at: https://digitalcommons.wayne.edu/oa_dissertations Part of the Computer Sciences Commons Recommended Citation Ning, Zhenyu, "Securing Arm Platform: From Software-Based To Hardware-Based Approaches" (2020). Wayne State University Dissertations. 2393. https://digitalcommons.wayne.edu/oa_dissertations/2393 This Open Access Dissertation is brought to you for free and open access by DigitalCommons@WayneState. It has been accepted for inclusion in Wayne State University Dissertations by an authorized administrator of DigitalCommons@WayneState. SECURING ARM PLATFORM: FROM SOFTWARE-BASED TO HARDWARE-BASED APPROACHES by ZHENYU NING DISSERTATION Submitted to the Graduate School, of Wayne State University, Detroit, Michigan in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY 2020 MAJOR: COMPUTER SCIENCE Approved By: ———————————————————– Advisor Date DEDICATION To my wife and all my family. ii ACKNOWLEDGEMENTS I wish to express my appreciation to those who supported and encouraged me in one way or another during the last five years. First of all, I would like to express my gratefulness to my advisor, Dr. Fengwei Zhang, for his valuable guidance and continuous support during my Ph.D. study at Wayne State University. Dr. Zhang led me into the way of academic research and showed me the essentials of a researcher. His enthusiasm for research has encouraged me to achieve the degree. During the tough times in the Ph.D. pursuit, he showed me great patient and offered numerous hours to discuss with me, without which I cannot succeed.