Building a Framework for High-Performance In-Memory Message-Oriented Middleware
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Enterprise Integration Patterns N About Apache Camel N Essential Patterns Enterprise Integration Patterns N Conclusions and More
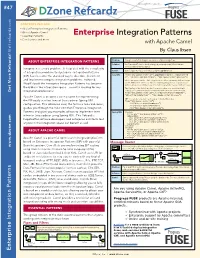
Brought to you by... #47 CONTENTS INCLUDE: n About Enterprise Integration Patterns n About Apache Camel n Essential Patterns Enterprise Integration Patterns n Conclusions and more... with Apache Camel Visit refcardz.com By Claus Ibsen ABOUT ENTERPRISE INTEGRATION PaTTERNS Problem A single event often triggers a sequence of processing steps Solution Use Pipes and Filters to divide a larger processing steps (filters) that are connected by channels (pipes) Integration is a hard problem. To help deal with the complexity Camel Camel supports Pipes and Filters using the pipeline node. of integration problems the Enterprise Integration Patterns Java DSL from(“jms:queue:order:in”).pipeline(“direct:transformOrd (EIP) have become the standard way to describe, document er”, “direct:validateOrder”, “jms:queue:order:process”); and implement complex integration problems. Hohpe & Where jms represents the JMS component used for consuming JMS messages Woolf’s book the Enterprise Integration Patterns has become on the JMS broker. Direct is used for combining endpoints in a synchronous fashion, allow you to divide routes into sub routes and/or reuse common routes. the bible in the integration space – essential reading for any Tip: Pipeline is the default mode of operation when you specify multiple integration professional. outputs, so it can be omitted and replaced with the more common node: from(“jms:queue:order:in”).to(“direct:transformOrder”, “direct:validateOrder”, “jms:queue:order:process”); Apache Camel is an open source project for implementing TIP: You can also separate each step as individual to nodes: the EIP easily in a few lines of Java code or Spring XML from(“jms:queue:order:in”) configuration. -

Robust Messaging with Rabbitmq
Spring RabbitMQ for High Load Martin Toshev Who am I Software consultant (CoffeeCupConsulting) BG JUG board member (http://jug.bg) OpenJDK and Oracle RDBMS enthusiast Twitter: @martin_fmi 2 3 Agenda • Messaging Basics • RabbitMQ Overview • Spring RabbitMQ 4 Messaging Basics 5 Messaging • Messaging provides a mechanism for loosely-coupled integration of systems • The central unit of processing in a message is a message which typically contains a body and a header 6 Use cases • Offloading long-running tasks to worker nodes • Distributing and processing high loads of data • Aggregating logs and propagating events between systems • Many others … 7 Messaging protocols • Messaging solutions implement different protocols for transferring of messages such as AMQP, XMPP, MQTT, STOMP, Kafka binary protocol and others • The variety of protocols imply vendor lock-in 8 Messaging protocols comparison AMQP MQTT XMPP STOMP Kafka goal replacement of messaging for instant messaging, message-oriented processing of large proprietary protocols resource-constrained adopted for wider middleware real-time data feeds devices use format binary binary XML-based text-based binary API divided into classes simple (5 basic different XML items ~ 10 basic commands 42 request types in (> 40 methods in operations with 2-3 with multiple types latest version (Kafka RabbitMQ) packet types for each) 2.0.0) reliability publisher/subscriber acknowledgements Acknowledgments Subscriber Acknowledgements, acknowledgements, and resumptions acknowledgements transactional transactions -

Rocketbufs: a Framework for Building Efficient, In-Memory, Message-Oriented Middleware
RocketBufs: A Framework for Building Efficient, In-Memory, Message-Oriented Middleware Huy Hoang, Benjamin Cassell, Tim Brecht, Samer Al-Kiswany Cheriton School of Computer Science, University of Waterloo ABSTRACT ACM Reference Format: As companies increasingly deploy message-oriented middleware Huy Hoang, Benjamin Cassell, Tim Brecht, Samer Al-Kiswany. 2020. Rock- (MOM) systems in mission-critical components of their infrastruc- etBufs: A Framework for Building Efficient, In-Memory, Message-Oriented Middleware. In The 14th ACM International Conference on Distributed and tures and services, the demand for improved performance and func- Event-based Systems (DEBS ’20), July 13–17, 2020, Virtual Event, QC, Canada. tionality has accelerated the rate at which new systems are being ACM, New York, NY, USA, 12 pages. https://doi.org/10.1145/3401025.3401744 developed. Unfortunately, existing MOM systems are not designed to take advantages of techniques for high-performance data center communication (e.g., RDMA). In this paper, we describe the design 1 INTRODUCTION and implementation of RocketBufs, a framework which provides Message-Oriented Middleware (MOM) systems, also often referred infrastructure for building high-performance, in-memory Message- to as publish/subscribe, message-queuing, or event-based systems, Oriented Middleware (MOM) applications. RocketBufs provides are a popular class of software designed to support loosely-coupled memory-based buffer abstractions and APIs, which are designed messaging in modern distributed applications. Examples of appli- to work efficiently with different transport protocols. Applications cations and services that utilize MOM systems include IBM’s cloud implemented using RocketBufs manage buffer data using input functions [29], the Apache OpenWhisk serverless framework [10], (rIn) and output (rOut) classes, while the framework is responsible the Hyperledger blockchain framework [7] and streaming media for transmitting, receiving and synchronizing buffer access. -

Analysis of Notification Methods with Respect to Mobile System Characteristics
Proceedings of the Federated Conference on DOI: 10.15439/2015F6 Computer Science and Information Systems pp. 1183–1189 ACSIS, Vol. 5 Analysis of notification methods with respect to mobile system characteristics Piotr Nawrocki ∗, Mikołaj Jakubowski † and Tomasz Godzik ‡ ∗AGH University of Science and Technology, al. A. Mickiewicza 30, 30-059 Krakow, Poland e-mail:[email protected] †e-mail:[email protected] ‡e-mail:[email protected] Abstract—Recently, there has been an increasing need for most promise and therefore the purpose is to discern their secure, efficient and simple notification methods for mobile usefulness in the best way possible. systems. Such systems are meant to provide users with precise In addition to the protocols and methods above, we inves- tools best suited for work or leisure environments and a lot of effort has been put into creating a multitude of mobile tigated other solutions, such as the Apple push notification applications. However, not much research has been put at the or Line application which, for various reasons, were not same time into determining which of the available protocols considered further. The Apple push notification technology is a are best suited for individual tasks. Here a number of basic good solution, but it is proprietary, i.e. limited to Apple devices notification methods are presented and tests are performed for and that is why we decided to test more universal solutions the most promising ones. An attempt is made to determine which methods have the best throughput, latency, security and other first. There are also solutions (applications) that use their own characteristics. -
Unravel Data Systems Version 4.5
UNRAVEL DATA SYSTEMS VERSION 4.5 Component name Component version name License names jQuery 1.8.2 MIT License Apache Tomcat 5.5.23 Apache License 2.0 Tachyon Project POM 0.8.2 Apache License 2.0 Apache Directory LDAP API Model 1.0.0-M20 Apache License 2.0 apache/incubator-heron 0.16.5.1 Apache License 2.0 Maven Plugin API 3.0.4 Apache License 2.0 ApacheDS Authentication Interceptor 2.0.0-M15 Apache License 2.0 Apache Directory LDAP API Extras ACI 1.0.0-M20 Apache License 2.0 Apache HttpComponents Core 4.3.3 Apache License 2.0 Spark Project Tags 2.0.0-preview Apache License 2.0 Curator Testing 3.3.0 Apache License 2.0 Apache HttpComponents Core 4.4.5 Apache License 2.0 Apache Commons Daemon 1.0.15 Apache License 2.0 classworlds 2.4 Apache License 2.0 abego TreeLayout Core 1.0.1 BSD 3-clause "New" or "Revised" License jackson-core 2.8.6 Apache License 2.0 Lucene Join 6.6.1 Apache License 2.0 Apache Commons CLI 1.3-cloudera-pre-r1439998 Apache License 2.0 hive-apache 0.5 Apache License 2.0 scala-parser-combinators 1.0.4 BSD 3-clause "New" or "Revised" License com.springsource.javax.xml.bind 2.1.7 Common Development and Distribution License 1.0 SnakeYAML 1.15 Apache License 2.0 JUnit 4.12 Common Public License 1.0 ApacheDS Protocol Kerberos 2.0.0-M12 Apache License 2.0 Apache Groovy 2.4.6 Apache License 2.0 JGraphT - Core 1.2.0 (GNU Lesser General Public License v2.1 or later AND Eclipse Public License 1.0) chill-java 0.5.0 Apache License 2.0 Apache Commons Logging 1.2 Apache License 2.0 OpenCensus 0.12.3 Apache License 2.0 ApacheDS Protocol -
Talend Open Studio for Big Data Release Notes
Talend Open Studio for Big Data Release Notes 6.0.0 Talend Open Studio for Big Data Adapted for v6.0.0. Supersedes previous releases. Publication date July 2, 2015 Copyleft This documentation is provided under the terms of the Creative Commons Public License (CCPL). For more information about what you can and cannot do with this documentation in accordance with the CCPL, please read: http://creativecommons.org/licenses/by-nc-sa/2.0/ Notices Talend is a trademark of Talend, Inc. All brands, product names, company names, trademarks and service marks are the properties of their respective owners. License Agreement The software described in this documentation is licensed under the Apache License, Version 2.0 (the "License"); you may not use this software except in compliance with the License. You may obtain a copy of the License at http://www.apache.org/licenses/LICENSE-2.0.html. Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License. This product includes software developed at AOP Alliance (Java/J2EE AOP standards), ASM, Amazon, AntlR, Apache ActiveMQ, Apache Ant, Apache Avro, Apache Axiom, Apache Axis, Apache Axis 2, Apache Batik, Apache CXF, Apache Cassandra, Apache Chemistry, Apache Common Http Client, Apache Common Http Core, Apache Commons, Apache Commons Bcel, Apache Commons JxPath, Apache -
Talend ESB System Management Integration User Guide
Talend ESB System Management Integration User Guide 6.0.1 Publication date: September 10, 2015 Copyright © 2011-2015 Talend Inc. All rights reserved. Copyleft This documentation is provided under the terms of the Creative Commons Public License (CCPL). For more information about what you can and cannot do with this documentation in accordance with the CCPL, please read: http://creativecommons.org/licenses/by-nc-sa/2.0/ This document may include documentation produced at The Apache Software Foundation which is licensed under The Apache License 2.0. Notices Talend and Talend ESB are trademarks of Talend, Inc. Apache CXF, CXF, Apache Karaf, Karaf, Apache Camel, Camel, Apache Maven, Maven, Apache Archiva, Archiva, Apache Syncope, Syncope, Apache ActiveMQ, ActiveMQ, Apache Log4j, Log4j, Apache Felix, Felix, Apache ServiceMix, ServiceMix, Apache Ant, Ant, Apache Derby, Derby, Apache Tomcat, Tomcat, Apache ZooKeeper, ZooKeeper, Apache Jackrabbit, Jackrabbit, Apache Santuario, Santuario, Apache DS, DS, Apache Avro, Avro, Apache Abdera, Abdera, Apache Chemistry, Chemistry, Apache CouchDB, CouchDB, Apache Kafka, Kafka, Apache Lucene, Lucene, Apache MINA, MINA, Apache Velocity, Velocity, Apache FOP, FOP, Apache HBase, HBase, Apache Hadoop, Hadoop, Apache Shiro, Shiro, Apache Axiom, Axiom, Apache Neethi, Neethi, Apache WSS4J, WSS4J are trademarks of The Apache Foundation. Eclipse Equinox is a trademark of the Eclipse Foundation, Inc. SoapUI is a trademark of SmartBear Software. Hyperic is a trademark of VMware, Inc. Nagios is a trademark of Nagios Enterprises, LLC. All other brands, product names, company names, trademarks and service marks are the properties of their respective owners. Table of Contents 1. Introduction .............................................................................................................. 1 2. Hyperic HQ Integration .............................................................................................. 3 2.1. -

Release Notes Date Published: 2021-03-25 Date Modified
Cloudera Runtime 7.2.8 Release Notes Date published: 2021-03-25 Date modified: https://docs.cloudera.com/ Legal Notice © Cloudera Inc. 2021. All rights reserved. The documentation is and contains Cloudera proprietary information protected by copyright and other intellectual property rights. No license under copyright or any other intellectual property right is granted herein. Copyright information for Cloudera software may be found within the documentation accompanying each component in a particular release. Cloudera software includes software from various open source or other third party projects, and may be released under the Apache Software License 2.0 (“ASLv2”), the Affero General Public License version 3 (AGPLv3), or other license terms. Other software included may be released under the terms of alternative open source licenses. Please review the license and notice files accompanying the software for additional licensing information. Please visit the Cloudera software product page for more information on Cloudera software. For more information on Cloudera support services, please visit either the Support or Sales page. Feel free to contact us directly to discuss your specific needs. Cloudera reserves the right to change any products at any time, and without notice. Cloudera assumes no responsibility nor liability arising from the use of products, except as expressly agreed to in writing by Cloudera. Cloudera, Cloudera Altus, HUE, Impala, Cloudera Impala, and other Cloudera marks are registered or unregistered trademarks in the United States and other countries. All other trademarks are the property of their respective owners. Disclaimer: EXCEPT AS EXPRESSLY PROVIDED IN A WRITTEN AGREEMENT WITH CLOUDERA, CLOUDERA DOES NOT MAKE NOR GIVE ANY REPRESENTATION, WARRANTY, NOR COVENANT OF ANY KIND, WHETHER EXPRESS OR IMPLIED, IN CONNECTION WITH CLOUDERA TECHNOLOGY OR RELATED SUPPORT PROVIDED IN CONNECTION THEREWITH. -

Zeromq
ZeroMQ Martin Sústrik <> ØMQ is a messaging system, or "message-oriented middleware", if you will. It's used in environments as diverse as financial services, game development, embedded systems, academic research and aerospace. Messaging systems work basically as instant messaging for applications. An application decides to communicate an event to another application (or multiple applications), it assembles the data to be sent, hits the "send" button and there we go—the messaging system takes care of the rest. Unlike instant messaging, though, messaging systems have no GUI and assume no human beings at the endpoints capable of intelligent intervention when something goes wrong. Messaging systems thus have to be both fault-tolerant and much faster than common instant messaging. ØMQ was originally conceived as an ultra-fast messaging system for stock trading and so the focus was on extreme optimization. The first year of the project was spent devising benchmarking methodology and trying to define an architecture that was as efficient as possible. Later on, approximately in the second year of development, the focus shifted to providing a generic system for building distributed applications and supporting arbitrary messaging patterns, various transport mechanisms, arbitrary language bindings, etc. During the third year the focus was mainly on improving usability and flattening the learning curve. We've adopted the BSD Sockets API, tried to clean up the semantics of individual messaging patterns, and so on. Hopefully, this chapter will give an insight into how the three goals above translated into the internal architecture of ØMQ, and provide some tips for those who are struggling with the same problems. -
Writing a Message Broker in Golang
Writing a Message Broker in GoLang George Vanburgh Supervised by Alvaro A.A. Fernandes May 3, 2016 A report submitted in part fulfilment of the degree of BSc (Hons) in Computer Science with Industrial Experience Abstract This report details an exercise in learning and evaluating the 'Go' programming language, by building a feature-rich application message broker using modern software engineering techniques and best practises. Some of the unique features of Go are presented, and the importance and relevance of these features in building simple, high-performance distributed software is explored. Discussion of the novel 'CSP-style' concurrency features in Go lead to an unorthodox design proposal for an enterprise-style messaging broker - George's Asynchronous Message Broker (gamq). The implementation of gamq is then is then described and critiqued. Finally, the process and results of the software testing are presented, and analysed. Acknowledgements Many thanks to my supervisor, Alvaro Fernandes, for his continuous support, guidance and patience - without which, this project would have been impossible. Thanks also go to my family and friends for their help and encouragement both during this project, and throughout my time at University. Contents 1 Introduction 3 1.1 Background . .3 1.2 Goals . .3 2 Background 4 2.1 Messages . .4 2.2 Message Brokers . .4 2.2.1 Pub/Sub . .6 2.2.2 Queues . .8 2.2.3 Topics . .8 2.3 Broker Requirements . .8 2.3.1 Failure Handling . 10 2.3.2 Network Bandwidth Utilisation . 10 2.3.3 Network latency . 10 2.3.4 Network packet loss . 11 2.3.5 Message power cost . -

Storage and Ingestion Systems in Support of Stream Processing
Storage and Ingestion Systems in Support of Stream Processing: A Survey Ovidiu-Cristian Marcu, Alexandru Costan, Gabriel Antoniu, María Pérez-Hernández, Radu Tudoran, Stefano Bortoli, Bogdan Nicolae To cite this version: Ovidiu-Cristian Marcu, Alexandru Costan, Gabriel Antoniu, María Pérez-Hernández, Radu Tudoran, et al.. Storage and Ingestion Systems in Support of Stream Processing: A Survey. [Technical Report] RT-0501, INRIA Rennes - Bretagne Atlantique and University of Rennes 1, France. 2018, pp.1-33. hal-01939280v2 HAL Id: hal-01939280 https://hal.inria.fr/hal-01939280v2 Submitted on 14 Dec 2018 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Storage and Ingestion Systems in Support of Stream Processing: A Survey Ovidiu-Cristian Marcu, Alexandru Costan, Gabriel Antoniu, María S. Pérez-Hernández, Radu Tudoran, Stefano Bortoli, Bogdan Nicolae TECHNICAL REPORT N° 0501 November 2018 Project-Team KerData ISSN 0249-0803 ISRN INRIA/RT--0501--FR+ENG Storage and Ingestion Systems in Support of Stream Processing: A Survey Ovidiu-Cristian Marcu∗, Alexandru -
Extending IBM Websphere MQ and Websphere Message Broker to The
Extending IBM WebSphere MQ and WebSphere Message Broker to the Clouds Session 14238 Ralph Bateman ( [email protected] ) STSM, Messaging and Integration Customer Support IBM Hursley Lab Private Community Deploy to a Cloud. Application Public Public Private 2 Don’t worry it’s in the cloud….. Thanks for listening. Questions? 3 Topics Cloud Concepts Introduction to PureApplication System, IWD, and SCAS Patterns and Messaging Virtual System Pattern – WebSphere MQ Hypervisor Edition Virtual Application Pattern – Messaging Extension Virtual System Pattern – Message Broker Reference – Current Versions and Links 4 Cloud Deployment Models Private Private –Used solely by the owning organisation –Benefits include in-house storage of critical data Community –Owned by several organisations but supporting a specific Community community –Some of the benefits of public cloud whilst in a closed community Public –The consumer and provider of cloud services are separate enterprises Public –Benefits include low-cost and scalability Hybrid Public –Seamlessly combines services from public and private cloud Private –Combination of benefits, but requires careful placement of secure/regulated data and apps 5 Cloud Service Models Reflect the traditional computing layers Software as a Service (SaaS) –Provides access to hosted applications or services, which Client Devices/Browsers may themselves use PaaS and IaaS services – Usage based charging , per hour or per ‘transaction’ Client Platform as a Service (PaaS) –Application Centric view - consumer’s application deployed