An Object Based Approach for Submarine Canyon Identification from Surface Networks
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Influence of a Dam on Fine-Sediment Storage in a Canyon River Joseph E
JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 111, F01025, doi:10.1029/2004JF000193, 2006 Influence of a dam on fine-sediment storage in a canyon river Joseph E. Hazel Jr.,1 David J. Topping,2 John C. Schmidt,3 and Matt Kaplinski1 Received 24 June 2004; revised 18 August 2005; accepted 14 November 2005; published 28 March 2006. [1] Glen Canyon Dam has caused a fundamental change in the distribution of fine sediment storage in the 99-km reach of the Colorado River in Marble Canyon, Grand Canyon National Park, Arizona. The two major storage sites for fine sediment (i.e., sand and finer material) in this canyon river are lateral recirculation eddies and the main- channel bed. We use a combination of methods, including direct measurement of sediment storage change, measurements of sediment flux, and comparison of the grain size of sediment found in different storage sites relative to the supply and that in transport, in order to evaluate the change in both the volume and location of sediment storage. The analysis shows that the bed of the main channel was an important storage environment for fine sediment in the predam era. In years of large seasonal accumulation, approximately 50% of the fine sediment supplied to the reach from upstream sources was stored on the main-channel bed. In contrast, sediment budgets constructed for two short-duration, high experimental releases from Glen Canyon Dam indicate that approximately 90% of the sediment discharge from the reach during each release was derived from eddy storage, rather than from sandy deposits on the main-channel bed. -

Lesson 4: Sediment Deposition and River Structures
LESSON 4: SEDIMENT DEPOSITION AND RIVER STRUCTURES ESSENTIAL QUESTION: What combination of factors both natural and manmade is necessary for healthy river restoration and how does this enhance the sustainability of natural and human communities? GUIDING QUESTION: As rivers age and slow they deposit sediment and form sediment structures, how are sediments and sediment structures important to the river ecosystem? OVERVIEW: The focus of this lesson is the deposition and erosional effects of slow-moving water in low gradient areas. These “mature rivers” with decreasing gradient result in the settling and deposition of sediments and the formation sediment structures. The river’s fast-flowing zone, the thalweg, causes erosion of the river banks forming cliffs called cut-banks. On slower inside turns, sediment is deposited as point-bars. Where the gradient is particularly level, the river will branch into many separate channels that weave in and out, leaving gravel bar islands. Where two meanders meet, the river will straighten, leaving oxbow lakes in the former meander bends. TIME: One class period MATERIALS: . Lesson 4- Sediment Deposition and River Structures.pptx . Lesson 4a- Sediment Deposition and River Structures.pdf . StreamTable.pptx . StreamTable.pdf . Mass Wasting and Flash Floods.pptx . Mass Wasting and Flash Floods.pdf . Stream Table . Sand . Reflection Journal Pages (printable handout) . Vocabulary Notes (printable handout) PROCEDURE: 1. Review Essential Question and introduce Guiding Question. 2. Hand out first Reflection Journal page and have students take a minute to consider and respond to the questions then discuss responses and questions generated. 3. Handout and go over the Vocabulary Notes. Students will define the vocabulary words as they watch the PowerPoint Lesson. -

Geomorphic Classification of Rivers
9.36 Geomorphic Classification of Rivers JM Buffington, U.S. Forest Service, Boise, ID, USA DR Montgomery, University of Washington, Seattle, WA, USA Published by Elsevier Inc. 9.36.1 Introduction 730 9.36.2 Purpose of Classification 730 9.36.3 Types of Channel Classification 731 9.36.3.1 Stream Order 731 9.36.3.2 Process Domains 732 9.36.3.3 Channel Pattern 732 9.36.3.4 Channel–Floodplain Interactions 735 9.36.3.5 Bed Material and Mobility 737 9.36.3.6 Channel Units 739 9.36.3.7 Hierarchical Classifications 739 9.36.3.8 Statistical Classifications 745 9.36.4 Use and Compatibility of Channel Classifications 745 9.36.5 The Rise and Fall of Classifications: Why Are Some Channel Classifications More Used Than Others? 747 9.36.6 Future Needs and Directions 753 9.36.6.1 Standardization and Sample Size 753 9.36.6.2 Remote Sensing 754 9.36.7 Conclusion 755 Acknowledgements 756 References 756 Appendix 762 9.36.1 Introduction 9.36.2 Purpose of Classification Over the last several decades, environmental legislation and a A basic tenet in geomorphology is that ‘form implies process.’As growing awareness of historical human disturbance to rivers such, numerous geomorphic classifications have been de- worldwide (Schumm, 1977; Collins et al., 2003; Surian and veloped for landscapes (Davis, 1899), hillslopes (Varnes, 1958), Rinaldi, 2003; Nilsson et al., 2005; Chin, 2006; Walter and and rivers (Section 9.36.3). The form–process paradigm is a Merritts, 2008) have fostered unprecedented collaboration potentially powerful tool for conducting quantitative geo- among scientists, land managers, and stakeholders to better morphic investigations. -

Trip Planner
National Park Service U.S. Department of the Interior Grand Canyon National Park Grand Canyon, Arizona Trip Planner Table of Contents WELCOME TO GRAND CANYON ................... 2 GENERAL INFORMATION ............................... 3 GETTING TO GRAND CANYON ...................... 4 WEATHER ........................................................ 5 SOUTH RIM ..................................................... 6 SOUTH RIM SERVICES AND FACILITIES ......... 7 NORTH RIM ..................................................... 8 NORTH RIM SERVICES AND FACILITIES ......... 9 TOURS AND TRIPS .......................................... 10 HIKING MAP ................................................... 12 DAY HIKING .................................................... 13 HIKING TIPS .................................................... 14 BACKPACKING ................................................ 15 GET INVOLVED ................................................ 17 OUTSIDE THE NATIONAL PARK ..................... 18 PARK PARTNERS ............................................. 19 Navigating Trip Planner This document uses links to ease navigation. A box around a word or website indicates a link. Welcome to Grand Canyon Welcome to Grand Canyon National Park! For many, a visit to Grand Canyon is a once in a lifetime opportunity and we hope you find the following pages useful for trip planning. Whether your first visit or your tenth, this planner can help you design the trip of your dreams. As we welcome over 6 million visitors a year to Grand Canyon, your -

Stream Restoration, a Natural Channel Design
Stream Restoration Prep8AICI by the North Carolina Stream Restonltlon Institute and North Carolina Sea Grant INC STATE UNIVERSITY I North Carolina State University and North Carolina A&T State University commit themselves to positive action to secure equal opportunity regardless of race, color, creed, national origin, religion, sex, age or disability. In addition, the two Universities welcome all persons without regard to sexual orientation. Contents Introduction to Fluvial Processes 1 Stream Assessment and Survey Procedures 2 Rosgen Stream-Classification Systems/ Channel Assessment and Validation Procedures 3 Bankfull Verification and Gage Station Analyses 4 Priority Options for Restoring Incised Streams 5 Reference Reach Survey 6 Design Procedures 7 Structures 8 Vegetation Stabilization and Riparian-Buffer Re-establishment 9 Erosion and Sediment-Control Plan 10 Flood Studies 11 Restoration Evaluation and Monitoring 12 References and Resources 13 Appendices Preface Streams and rivers serve many purposes, including water supply, The authors would like to thank the following people for reviewing wildlife habitat, energy generation, transportation and recreation. the document: A stream is a dynamic, complex system that includes not only Micky Clemmons the active channel but also the floodplain and the vegetation Rockie English, Ph.D. along its edges. A natural stream system remains stable while Chris Estes transporting a wide range of flows and sediment produced in its Angela Jessup, P.E. watershed, maintaining a state of "dynamic equilibrium." When Joseph Mickey changes to the channel, floodplain, vegetation, flow or sediment David Penrose supply significantly affect this equilibrium, the stream may Todd St. John become unstable and start adjusting toward a new equilibrium state. -

Hells Canyon 5 Day to Heller
Trip Logistics and Itinerary 5 days, 4 nights Wine & Food on the Snake River in Hells Canyon Trip Starts: Minam, OR Trip Ends: Minam, OR Put-in: Hell’s Canyon Dam, OR Take-out: Heller Bar, WA (23 miles south of Asotin, WA) Trip length: 79 miles Class III-IV rapids Each Trip varies slightly with size of group, interests of guests, etc. This is a “typical” trip itinerary that will vary. Day before Launch: Stop at Minam on your way to your motel in Wallowa or Enterprise to pick up your dry bag and go over the morning itinerary. Day 1: If staying in Wallowa at the Mingo Motel we will pick you up at 6:15 am. If staying in Enterprise we will pick you up at the Ponderosa Motel in our shuttle van at 6:45 am. Travel to Hells Canyon Dam Launch site (3hr drive from Minam) with a bathroom break at the Hells Canyon Overlook. Meet your guides, go over basic safety talk, and load into rafts between 10 and 11 am. Lunch will be served riverside. Enjoy awe inspiring geology, spot wildlife. Run some of the biggest whitewater of the trip, first up Wild Sheep Rapid. Stop to scout Granite Rapid and view Nez Perce pictographs. Arrive in camp between 3-4pm. Evening camp time: swim, hike, play games, relax! Approximately 6pm: Wine and Hor D’oevres presented by Chef Andrae and the featured Winery. Approximately 7 pm dinner presented by chef Andrae Bopp. Day 2: Coffee is ready by 6 am. Leisurely breakfast between 7 and 8 am. -

Classifying Rivers - Three Stages of River Development
Classifying Rivers - Three Stages of River Development River Characteristics - Sediment Transport - River Velocity - Terminology The illustrations below represent the 3 general classifications into which rivers are placed according to specific characteristics. These categories are: Youthful, Mature and Old Age. A Rejuvenated River, one with a gradient that is raised by the earth's movement, can be an old age river that returns to a Youthful State, and which repeats the cycle of stages once again. A brief overview of each stage of river development begins after the images. A list of pertinent vocabulary appears at the bottom of this document. You may wish to consult it so that you will be aware of terminology used in the descriptive text that follows. Characteristics found in the 3 Stages of River Development: L. Immoor 2006 Geoteach.com 1 Youthful River: Perhaps the most dynamic of all rivers is a Youthful River. Rafters seeking an exciting ride will surely gravitate towards a young river for their recreational thrills. Characteristically youthful rivers are found at higher elevations, in mountainous areas, where the slope of the land is steeper. Water that flows over such a landscape will flow very fast. Youthful rivers can be a tributary of a larger and older river, hundreds of miles away and, in fact, they may be close to the headwaters (the beginning) of that larger river. Upon observation of a Youthful River, here is what one might see: 1. The river flowing down a steep gradient (slope). 2. The channel is deeper than it is wide and V-shaped due to downcutting rather than lateral (side-to-side) erosion. -

Grand Canyon Escalade?
WHY ARE PROFITEERS STILL PUSHING Grand Canyon Escalade? Escalade’s memorandum with Ben Shelly said, if the Master Agreement is not executed “by JULY 1, 2013 ,” then the relationship with the Nation “shall terminate without further action .” a a l l a a b b e e h h S S y y e e l l r r a a M M THEIR ORIGINAL PLAN: • Gondola Tram to the bottom of the Grand Canyon • River Walk & Confluence Restaurant • A destination resort hotel & spa, other hotels, RV park • Commercia l/ retail spac e/opportunities, and an airport • 5,167 acres developed at the conflu ence of the Colorado and Little Colorado rivers . Escalade partner Albert Hale (left) and promoter Lamar Whitmer (right) present to Navajo Council, June 2014. People of Dine’ bi’keyah REJECT Grand Canyon Escalade. IT’S TIME TO ASK: • Where is the MASTER AGREEMENT ? • Who is going to pay $300 million or more • Where is the “ solid public support ” President for roads, water, and infrastructure? Shelly said he needed before December 31, 2012? • Where is the final package of legislation the • Where is support from Navajo presidential Confluence Partners said they delivered to the candidates and Navajo Nation Council? Navajo Nation Council Office of Legislative • Who is going to profit? Affairs on June 10, 2014? WE ARE the Save the Confluence families, generations of Navajo shepherds with grazing rights and home-site leases on the East Rim of Grand Canyon. “Generations of teachings and way of life are at stake.” “It has been a long hard journey and we have suffered enough.” –Sylvia Nockideneh-Tee Photo by Melody Nez –Delores Aguirre-Wilson, at the Confluence 1971 Resident Lucille Daniel stands firmly against Escalade. -
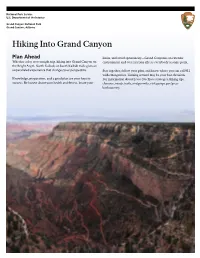
Introduction to Backcountry Hiking
National Park Service U.S. Department of the Interior Grand Canyon National Park Grand Canyon, Arizona Hiking Into Grand Canyon Plan Ahead limits, and avoid spontaneity—Grand Canyon is an extreme Whether a day or overnight trip, hiking into Grand Canyon on environment and overexertion affects everybody at some point. the Bright Angel, North Kaibab, or South Kaibab trails gives an unparalleled experience that changes your perspective. Stay together, follow your plan, and know where you can call 911 with emergencies. Turning around may be your best decision. Knowledge, preparation, and a good plan are your keys to For information about Leave No Trace strategies, hiking tips, success. Be honest about your health and fitness, know your closures, roads, trails, and permits, visit go.nps.gov/grca- backcountry. Warning While Hiking BALANCE FOOD AND WATER Hiking to the river and back in one • Do not force fluids. Drink water when day is not recommended due to you are thirsty, and stop when you are long distance, extreme temperature quenched. Over-hydration may lead to a changes, and an approximately 5,000- life-threatening electrolyte disorder called foot (1,500 m) elevation change each hyponatremia. way. RESTORE YOUR ENERGY If you think you have the fitness and • Eat double your normal intake of expertise to attempt this extremely carbohydrates and salty foods. Calories strenuous hike, please seek the advice play an important role in regulating body of a park ranger at the Backcountry temperature, and hiking suppresses your Information Center. appetite. TAKE CARE OF YOUR BODY Know how to rescue yourself. -

Channel Aggradation by Beaver Dams on a Small Agricultural Stream in Eastern Nebraska
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln U.S. Department of Agriculture: Agricultural Publications from USDA-ARS / UNL Faculty Research Service, Lincoln, Nebraska 9-12-2004 Channel Aggradation by Beaver Dams on a Small Agricultural Stream in Eastern Nebraska M. C. McCullough University of Nebraska-Lincoln J. L. Harper University of Nebraska-Lincoln D. E. Eisenhauer University of Nebraska-Lincoln, [email protected] M. G. Dosskey USDA National Agroforestry Center, Lincoln, Nebraska, [email protected] Follow this and additional works at: https://digitalcommons.unl.edu/usdaarsfacpub Part of the Agricultural Science Commons McCullough, M. C.; Harper, J. L.; Eisenhauer, D. E.; and Dosskey, M. G., "Channel Aggradation by Beaver Dams on a Small Agricultural Stream in Eastern Nebraska" (2004). Publications from USDA-ARS / UNL Faculty. 147. https://digitalcommons.unl.edu/usdaarsfacpub/147 This Article is brought to you for free and open access by the U.S. Department of Agriculture: Agricultural Research Service, Lincoln, Nebraska at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in Publications from USDA-ARS / UNL Faculty by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. This is not a peer-reviewed article. Self-Sustaining Solutions for Streams, Wetlands, and Watersheds, Proceedings of the 12-15 September 2004 Conference (St. Paul, Minnesota USA) Publication Date 12 September 2004 ASAE Publication Number 701P0904. Ed. J. L. D'Ambrosio Channel Aggradation by Beaver Dams on a Small Agricultural Stream in Eastern Nebraska M. C. McCullough1, J. L. Harper2, D.E. Eisenhauer3, M. G. Dosskey4 ABSTRACT We assessed the effect of beaver dams on channel gradation of an incised stream in an agricultural area of eastern Nebraska. -

Seasonal Controls on Meteoric 7Be in Coarse‐Grained River Channels
HYDROLOGICAL PROCESSES Hydrol. Process. 28, 2738–2748 (2014) Published online 24 April 2013 in Wiley Online Library (wileyonlinelibrary.com) DOI: 10.1002/hyp.9800 Seasonal controls on meteoric 7Be in coarse-grained river channels James M. Kaste,1* Francis J. Magilligan,2 Carl E. Renshaw,2 G. Burch Fisher3 and W. Brian Dade2 1 Geology Department, The College of William & Mary, Williamsburg, VA, 23187, USA 2 Department of Earth Sciences, Dartmouth College, Hanover, NH, 03755, USA 3 Department of Earth Science, University of California, Santa Barbara, CA, 93106, USA Abstract: Cosmogenic 7Be is a natural tracer of short-term hydrological processes, but its distribution in upland fluvial environments over different temporal and spatial scales has not been well described. We measured 7Be in 450 sediment samples collected from perennial channels draining the middle of the Connecticut River Basin, an environment that is predominantly well-sorted sand. By sampling tributaries that have natural and managed fluctuations in discharge, we find that the 7Be activity in thalweg sediments is not necessarily limited by the supply of new or fine-grained sediment, but is controlled seasonally by atmospheric flux variations and the magnitude and frequency of bed mobilizing events. In late winter, 7Be concentrations in transitional bedload are lowest, typically 1 to 3 Bq kgÀ1 as 7Be is lost from watersheds via radioactive decay in the snowpack. In mid- summer, however, 7Be concentrations are at least twice as high because of increased convective storm activity which delivers high 7Be fluxes directly to the fluvial system. A mixed layer of sediment at least 8 cm thick is maintained for months in channels during persistent low rainfall and flow conditions, indicating that stationary sediments can be recharged with 7Be. -

9. Drainage Patterns
63 9. DRAINAGE PATTERNS (A discussion) Streams and rivers often follow unexpected patterns that do not seem to reflect topography. In the Middle Rocky Mountains, major rivers such as the Green River cut through the Uinta Mountains instead of going around their end only a few dozen miles to the east. Any intelligent river would be expected to go around, and not “over” the Uintas. That is not what the Green River has done. It has cut a gorge over 600 m (2000ft) deep through the Uintas. The Colorado River has cut perpendicularly through the Fisher and Moab Valleys and then it cuts a mile down through the Kaibab Upwarp to form the Grand Canyon. This pattern is also well represented in other continents of the Earth. Several models have been used to explain these unusual features. Some pertinent concepts will help you understand proposed models. A river system that follows a normal downhill pattern along a pre-existing land surface is said to be consequent (the consequence of original slope). This pattern can be altered by mountain uplift, erosion around resistant rock units, etc. When altered, this is called subsequent (subsequent to the original pattern). Occasionally a river may erode its bed into the path of another and capture it. This is called stream capture or piracy. When this happens, the downstream portion of the captured river dries up and is said to be beheaded. The case of rivers cutting right through mountain ranges is especially intriguing. Two models have been given serious consideration. The first, called antecedent, postulates that the river has stayed more or less in its original position as slow uplift of the region has taken place (compare Diagrams A and B under “Antecedent” in Fig.