Masterthesis-07Gr1080
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Journal of Peter Christian Geertsen 1855
THE JOURNAL OF PETER CHRISTIAN GEERTSEN 1855 - 1864 TRANSLATED BY RICHARD L. JENSEN (Oct 1855 – June 5th 1860) AND ULLA CHRISTENSEN (June 6th 1860 – Feb 1864) EDITED BY JEFF GEERTSEN 1 Editor’s Note: The Journal of Peter Christian Geertsen was transcribed from microfilm copies of his original books, which now reside in the LDS Church Archives. About two thirds of the journal was translated in the 1990’s by Richard L. Jensen, who was unable to complete the work due to other assignments by the Church History Deprtament, where he is employed. I am very grateful, therefore, to have made contact with Ulla Christensen, who graciously volunteered to complete the translation. A native of Denmark, Ulla currently resides in Nevada, and is a descendant of the sister of Jens Jensen Gravgaard, the father of Jensine Jensen, the wife of Peter C. Geertsen Jr. Her translation is a seamless continuation of Richard Jensen’s work, and the completed journal is now a very readable witness to Peter’s early life and church work. The account begins with a biography and ends just before Peter and his new wife Mariane Pedersen left Denmark to come to Utah in 1864. Peter returned to Denmark twice as a missionary, and journal accounts of those missions, written in English this time, have been transcribed and are available as well. It will be helpful for the reader to understand the notations used by myself and the translators. Missing and implied words were placed in brackets [ ] by the translators to add clarity. Unreadable words are indicated by [?]. -

4432341-6945660-1.Pdf
* Transporttid til GF1: Omsorg, sundhed og pædagogik Skagen# Kortet viser den korteste transporttid til en erhvervsskole, der tilbyder GF1: Omsorg, sundhed og pædagogik, for alle byer i Nordjylland med over 500 indbyggere. Den samlede transporttid beregnes fra afgangs- tidspunkt i by til ringetid på uddannelsesinstitutionen på en hverdag i * # * september 2019. # * # Ålbæk Tversted * Hirtshals# * k < 30 min # * # * Åbyen # * k # Horne 30 - 45 min Bindslev Jerup * Tornby # * Bjergby # * k 45 - 60 min # Strandby * # * # * # Astrup (Hjørring) * # 60 - 75 min # Sindal Elling # * * k # Lønstrup Hjørring Ravnshøj * SOSU Hjørring # 75 - 90 min Frederikshavn * # * k # Kilden Lendum * k 90 - 120 # Gærum Tårs # * * # * > 120 Løkken # k Vrå Østervrå * # !(Sæby D Ikke muligt Serritslev * # * # Jerslev ! SOSU Aalborg Dybvad * !(Saltum Brønderslev# (! Flauenskjold " SOSU Aars Hune Øster Brønderslev (! # !( SOSU Hjørring !(Pandrup !( Klokkerholm (! Voerså !(Kås !(Tylstrup (! Agersted # SOSU Hobro Dronninglund AabybroNørhalne !(Sulsted !(Hjallerup !( !( Asaa SOSU Thisted Birkelse !( !((!Grindsted !( " !( !(Biersted (! !( Vestbjerg (!Vadum Vodskov ! Techcollege, Rørdalsvej Hanstholm Halvrimmen (! ") (!!( !(Langholt Brovst !( Ræhr Fjerritslev !( ") Frøstrup ") Skovsgård Vester Hassing ") ! !(Ulsted (! Gjøl (Nørresundby !( (!(! ! !( Gandrup !(Hou Klitmøller ! Techcollege, Rørdalsvej ") Østerild SOSU Aalborg (!Aalborg Nors ") ") (!Klarup !Frejlev !( ( (!Storvorde Hals Sønderholm (!Gistrup !( !( (! Gudumholm Nibe Dall Villaby SOSU Thisted ") (!(!Svenstrup -

Annual Report 2015
Annual Report 2015 Nordjyske Bank A/S Torvet 4 9400 Nørresundby Telephone +45 9870 3333 [email protected] www.nordjyskebank.dk CVR: 30828712 BIC/SWIFT nrsbdk24 The Executive Board, Nordjyske Bank Annual Report 2015 • page 2 Management Report Contents – Annual Report 2015 Page Management Report 2015 ....................................................................... 4 Principal issues .................................................................................... 4 The year’s result ................................................................................... 5 Suggested distribution of dividend and consolidation ........................... 7 Development in North Jutland .............................................................. 8 Expectations for 2016 ........................................................................... 9 Nordjyske Bank’s strategy – towards new times ................................ 10 Activities in the bank in 2015 .............................................................. 12 Development in the bank’s staff ......................................................... 13 Risk and risk management ................................................................. 16 The Supervision Diamond .................................................................. 16 Credit risks ......................................................................................... 17 Other risks .......................................................................................... 25 Liquidity ............................................................................................. -
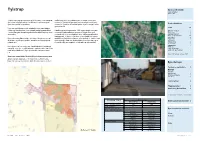
Tylstrup Byens Profil Udadtil Tylstrup-Marked Tylstrup Kro
Tylstrup Byens profil udadtil Tylstrup-marked Tylstrup Kro Tylstrup har tydeligt karakter af gl. stationsby - men særpræ- mellemlang eller lang uddannelse, er meget under gen- get kunne udnyttes bedre. Kort afstand til motorvej giver nemsnittet. Antallet af par med børn er meget under gen- Servicefunktioner gode betingelser for pendlere. nemsnittet. Andelen af beskæftigede i byen er meget under gennemsnittet. Byen har institutioner, skole, idrætsfaciliteter samt ældre- TOTAL 25 center, og flere butikker - her i blandt to dagligvarebutikker Befolkningsudviklingen siden 199 ligger meget over gen- Bibliotek - bogbus 1 - hvilket bør gøre bosætning attraktiv for børnefamilier, såvel nemsnittet. Indkomsten pr. person er meget under gen- Børnehaver 1 som ældre. nemsnittet. Den gennemsnitlige årlige tilflytning i forhold til Dagligvarebutikker Dagpleje og vuggestuer 10 indbyggertallet i byen, er lidt over gennemsnittet. Gennem- Foreninger 4 Byen virker dog lidt kedelig - der kunne fx gøres mere ud snitsalderen for beboere i byen, er meget højere (ældre) end Folkeskoler 1 af at åbne og integrere grønne områder som samlings/op- gennemsnittet. Andelen af parcelhuse er meget under gen- Forlystelser - holdssteder. nemsnittet. Byens huspriser er lidt under gennemsnittet. Fritidsklubber Idrætsklubber 4 Lægepraksis - Hovedparten af det omgivende landskab dyrkes landbrugs- Tandlæger - mæssigt, men der er også attraktive naturområder især mod Teatre og biografer - nord langs Lindholm Å og ved søområdet tæt på motorve- Ungdoms- og efterskoler - jen. Kilde: -

Velkommen Til Aktionærmøder I Spar Nord Bankområde Nørresundby
Velkommen til aktionærmøder i Spar Nord Bankområde Nørresundby Tirsdag 28. februar 2017 kl. 18.00 Musikkens Hus Musikkens Plads 1 9000 Aalborg Onsdag 1. marts 2017 kl. 17.00 DGI Huset Aabybro Jens Møllers Vej 3 9440 Aabybro Himlen var blå, stemningen helt i top og en flot flagallé sat op sidste sommer, da mere end 180 af de helt yngste borgere fra Gandrup og omegn mødtes med FRØNSE og Spar Nord Fonden. Sammen klippede de snoren ved indvielsen og ibrugtagningen af den nye flotte grillhytte, som stod nyopført, bl.a. takket været en økonomisk fondsdonation på 5.000 kr. til Gandrup Borgerforening. Spar Nords Jonas Bundgaard Kristensen og Ole Busk Hansen overrakte Spar Nord Fondens donation til Jens Egon Kristensen og Arne Jacobsen fra Borgerforeningens ”tirsdagshold”. I 2016 fik plejehjemmet i Aabybro 10.000 kroner og plejehjemmet kunne nu anskaffe den længe ønskede ladcykel – til glæde for både beboere og ”chauffører”. Beboerne kan få en herlig tur i den friske luft og chaufførerne (medlemmer af Støtteforeningen) får masser af motion og en go’ snak med passagererne. Velkommen til aktionærmøde Kære aktionær Du indbydes hermed til aktionærmøde i Bankområde Nørresundby tirsdag 28. februar 2017 kl. 18.00 i Musikkens Hus, Musikkens Plads 1, 9000 Aalborg og onsdag 1. marts 2017 kl. 17.00 i DGI Huset Aabybro, Jens Møllers Vej 3, 9440 Aabybro Aktionærmødet i 2017 er det første aktionærmøde, som omfatter både Søren Kjeldgaard Stenstrop det tidligere bankområde Aabybro og det fortsættende bankområde Bankrådsformand, Nørresundby. Nørresundby Vi glæder os til at byde nye såvel som gamle aktionærer velkomne til en forhåbentlig spændende aften, hvor vi vil orientere om bankens virke, såvel lokalt som landsdækkende. -
Aalborg in Figures 2021
Aalborg in fgures 2021 Aalborg in fgures 2021 June 2021 Published by The Economic Ofce, Mayor’s Department Boulevarden 13, DK-9000 Aalborg Area on 1 January 2021 ...........................................................................1,137.40 km2 Population on 1 January 2021 ..........................................................................219,487 Percentage population whole Denmark ...............................................................3.76 Population density inhabitants per km2 ......................................................... 192.97 2 Preface The purpose of Aalborg in fgures is to provide an easily accessible overview of some important statistical information about Aalborg. More detailed information is available via the Aalborg municipality’s website www.aalborg.dk (about the municipality / Statistics and indicators) or by contacting the Economic Ofce, Mayor’s Department. 3 Content The City of Aalborg Political and administrative organization ...................................................................5 The seven Departments are ..............................................................................................6 Elections to municipality councils...................................................................................7 Selected key fgures ..............................................................................................................8 Population and Housing Situation Population ...............................................................................................................................12 -

Borgermøde Byudviklingsplan for Stae Og Vester Hassing
Borgermøde byudviklingsplan for Stae og Vester Hassing 26. maj 2021 By- og Landskabsforvaltningen Aalborg Kommune Aalborg Kommune Dagsorden 1. gang digitalt borgermøde om byudviklingsplan – ikke det bedste men det næst bedste 19:00 Velkomst, præsentation af program og ”panel” deltagerne v/Rådmand Hans Henrik Henriksen 19:10 Byudvikling i Stae & Vester Hassing, herunder konkrete projekter v/ Planlægger Anne-Vibeke Skovmark 19:30 Stil spørgsmål via chatten til oplæggene og proces 20:25 Afrunding v/ Rådmand Hans Henrik Henriksen Aalborg Kommune Præsentation Aalborg Kommune Rådmand for By- og Landskabsforvaltningen Hans Henrik Henriksen Afdelingsleder Charlotte Krogh Planlægger Mette Kristoffersen Planlægger Anne-Vibeke Skovmark Aalborg Kommune Målet med borgermødet At inspirere og få ideer og forslag til det arbejdet med en byudviklingsplan for Stae og Vester Hassing At inspirere og få til ideer til konkrete projekter i Stae og Vester Hassing . Herunder synergieffekten med Energipark Aalborg At give mulighed for at få afklaret spørgsmål Vi vil alle gerne se en god udvikling af Stae og Vester Hassing Der tages ikke formelt referat fra mødet. Det optages og lægges på hjemmesiden sammen med oplæg. Vigtig at i sender jeres høringssvar, så de kan blive politisk behandlet senest den 29. juni 2021 Aalborg Kommune Baggrund – overordnet planlægning Stae & Vester Hassing er sammen med 10 andre byer udpeget som en samlet oplandsby med særligt vækstpotentiale. Aalborg Kommune Planlægningssystemet i Danmark Region Nordjylland Staten Regional Udvikling Landsplanlægning: Landsplanredegørelser, oversigt over statslige interesser (fx detailhandel, kystnærhedszonen) Råstofplanlægning Jordforurening Sektorplaner: vandplaner, NATURA 2000-planer, trafikplan Kommunen Planstrategi kommuneplan Arealregulering for by og land Lokalplaner Aalborg Kommune Hvad består byudviklingsplanen af? Aalborg Kommune Fakta om Stae og Vester Hassing Stae & Vester Hassing tæt tilknyttet Ca. -

Udbygning Af Eksisterende 400 Kv-Masterække Mellem Nordjyllandsværket Og Transformerstationen Ved Vester Hassing
Niels Bohrs Vej 30 9220 Aalborg Øst Tlf. 96 35 10 00 Udbygning af eksisterende 400 kV-masterække mellem Nordjyllandsværket og transformerstationen ved Vester Hassing VVM-redegørelse Januar 2005 Titel: Udbygning af eksisterende 400 kV-masterække mellem Nordjyllandsværket og transformerstationen ved Vester Hassing VVM-redegørelse Udgiver: Nordjyllands Amt, Niels Bohrs Vej 30, 9220 Aalborg Øst Telefon 96 35 10 00 Udarbejdet af: Nordjyllands Amt i samarbejde med Eltra, Arkitektfirmaet Hasløv & Kjærsgaard I/S og COWI A/S Emneord: VVM-redegørelse, højspændingsanlæg, miljøpåvirkninger Layout: COWI A/S og Arkitektfirmaet Hasløv & Kjærsgaard I/S Grundkort: © Kort og Matrikelstyrelsen 1992/KD.86.1029 Tryk: Salogruppen Oplag: 200 stk. Foto: COWI A/S: Michael Thurland, Martin Vestergaard, Signe Nepper Larsen og Mette Mejsen Westergaard Hasløv & Kjærsgaard I/S: Dan Hasløv og Benny Bøttiger Scanpix Eltra ISBN-nr: 87-7775-586-3 Udgivelsesår: 2005 Henvendelse vedrørende rapporten til Nordjyllands Amt, Teknik og Miljø på telefon 96 35 10 00 Forsiden: Michael Thurland Kapitel 1 – Indledning . 2 1.1 Projektet . 2 1.2 Formålet med projektet . 2 1.3 VVM-redegørelsen . 3 1.4 Manglende viden . 3 Kapitel 2 – Sammenfatning . 4 2.1 Projektet og VVM-redegørelsen . 4 2.2 Hvorfor skal anlægget ligge lige dér? . 6 2.3 Visuelle virkninger . 6 2.4 Hvad betyder det for mig? . 6 2.5 Påvirkninger af natur . 8 2.6 Hvad gør man for at undgå problemer for miljø og landskab? . 9 2.7 Undersøgte alternativer . 9 Kapitel 3 – Baggrund . 10 3.1 Lovgrundlag for etablering af højspændingsanlæg . 10 3.2 Principper for udbygning af transmissionsnettet . 11 Indholdsfortegnelse 3.3 Behovet for udbygningen . -

Annual Report 2017
Annual Report 2017 Nordjyske Bank A/S CVR Torvet 4 30828712 9400 Nørresundby Reg.no. Telephone 8099 +45 9870 3333 BIC/SWIFT E-mail nrsbdk24 [email protected] LEI Homepage 5493001B6MUORX4ESV75 www.nordjyskebank.dk Annual Report 2017 • page 2 Management Report │Content Content Page Management Report 2017 ............................................................. The management’s preface .................................................... 4 Overview ................................................................................ 5 Main and key figures ............................................................... 6 Summary ................................................................................. 7 Business model and strategy .................................................. 8 Account Report ..................................................................... 11 Risks ..................................................................................... 25 Investor Relations ................................................................. 34 Company Management ....................................................... 37 Social responsibility .............................................................. 45 Endorsements ........................................................................... 47 Annual Account 2017 ................................................................ 53 Statement of account ............................................................ 53 Suggested distribution of dovidend ...................................... -

Se PDF: 1 Køreplan, Stoppesteder Og Kort
1 bus køreplan & linjemap 1 Hals (Østergade) - Sønderholm Skole (Nibevej / Se I Webstedsmodus Sønderholm) 1 bus linjen (Hals (Østergade) - Sønderholm Skole (Nibevej / Sønderholm)) har 15 ruter. på almindelige hverdage er deres kørselstider: (1) Aabybro / Airport: 18:28 (2) Aalborg Busterminal: 05:53 - 22:25 (3) Aalborg Busterminal: 05:08 - 23:20 (4) Bouet: 06:34 - 18:00 (5) City Syd: 18:45 - 22:45 (6) City Syd: 06:24 - 17:24 (7) Ferslev: 06:53 - 22:20 (8) Godthåb: 05:00 - 22:30 (9) Godthåb: 17:35 (10) Grindsted: 05:29 - 22:30 (11) Hals: 06:48 - 22:49 (12) Langholt: 05:04 - 22:00 (13) Sønderholm: 06:05 - 17:05 (14) Vodskov: 08:35 - 21:29 (15) Vodskov Kirke: 18:17 - 22:17 Brug Moovit Appen til at ƒnde den nærmeste 1 bus station omkring dig og ƒnde ud af, hvornår næste 1 bus ankommer. Retning: Aabybro / Airport 1 bus køreplan 50 stop Aabybro / Airport Rute køreplan: SE LINJEKØREPLAN mandag Ikke i drift tirsdag Ikke i drift Tidselbakken (Vodskov Kirkevej / Vodskov Vodskov Kirkevej 64, Vodskov onsdag Ikke i drift Vodskov Skole (Kirkevej / Aalborg Kommune) torsdag Ikke i drift Vodskov Kirkevej 57, Vodskov fredag Ikke i drift Kirkevej (Langbrokrovej / Vodskov) lørdag 18:28 Vodskov Kirkevej 25, Vodskov søndag 18:28 Wild Westvej (Kirkevej / Vodskov) Vodskov Kirkevej 1, Vodskov Vodskov Brugs (Vodskovvej / Vodskov) Vodskovvej 16, Vodskov 1 bus information Retning: Aabybro / Airport Engholm Stoppesteder: 50 Turvarighed: 56 min Kvickly (Loftbrovej / Nørresundby) Linjeoversigt: Tidselbakken (Vodskov Kirkevej / Loftbrovej, Nørresundby Vodskov, Vodskov Skole (Kirkevej / Aalborg Kommune), Kirkevej (Langbrokrovej / Vodskov), Wild Bøgildsmindevej (Hjørringvej / Nørresundby) Westvej (Kirkevej / Vodskov), Vodskov Brugs Hjørringvej, Nørresundby (Vodskovvej / Vodskov), Engholm, Kvickly (Loftbrovej / Nørresundby), Bøgildsmindevej Gl. -

Bymændene I Vester Hassing 1919, Af Klem Thomsen, 2018, Ny
Bymændene i Vester Hassing 1919 Hals ”Vi undertegnede Bymænd i Vester Hassing By, V. Hassing Sogn, Arkiv skøder og overdrager herved til A/S Vester Hassing Afholdshotel den os tilhørende saakaldte Krodam i Vester Hassing By, beliggende umiddelbart ved den gamle Kro”. Af Klem Thomsen Historisk Samfund for I 1919 solgte bymændene i Vester Hassing den umatrikulerede krodam i Himmerland og Kjær Herred Vester Hassing by. Bag såvel sælgerne som stedet bag denne handel ligger og forfatteren har venligst reminiscenser fra det gamle bondesamfund og fra udskiftningen. givet Hals Arkiv lov til at bringe artiklen ”Bymændene i Vester Hassing 1919” digitalt Det gamle bondesamfund på arkivets hjemmeside. I det gamle bondesamfund, før landboreformernes tid i slutningen af 1700- Artiklen er oprindelig bragt i tallet, taler historikerne om et dyrkningsfællesskab. Der var dog mere tale "Fra Himmerland og Kjær om et fællesskab omkring driften af jorden, for den enkelte bruger i lands- Herred 2018", udgivet i byen dyrkede sine afmålte agre selvstændigt, men måtte selvfølgelig tage december 2018 af Historisk hensyn til landsbyens fælles dyrkningsrytme. Samfund for Himmerland og For at få fællesdriften til at fungere fandtes der for de enkelte lands- Kjær Herred. I den digitale udgave har byer et sæt nedskrevne regler, kaldet en granderet eller vide (af ordet forfatteren rettet enkelte op- vide i betydningen straf i form af en bøde). Dette var en form for ordens- lysninger om bymanden Mikkel reglement, som var vedtaget af bymændene (også kaldet granderne), og Skibsted Als. for hvis overtrædelser der var fastsat bøder. I landskabslovene omtales April 2019. grandestævnet eller gadestævnet (senere kaldt bystævnet), som var by- mændenes besluttende forsamling. -

Stedregister Til Nørrejyske Godsarkiver
Stedregister til Nørrejyske Godsarkiver ved Bente S. Vestergaard Voergård, Dronninglund herred. Foto: Bente S. Vestergaard. Udgiverselskabet ved Landsarkivet for Nørrejylland 2000 Landsarkivet for Nørrejylland hedder i dag Rigsarkivet, Viborg Herreds-nummer-register: 1. Horns 29. Sønderlyng 56. Nim 2. Vennebjerg 30. Middelsom 57. Bjerre 3. Dronninglund 31. Lysgård 58. Hatting 4. Børglum 32. Hids 59. Nørvang 5. Hvetbo 33. Houlbjerg 60. Tørrild 6. Han, Øster 34. Onsild 61. Jerlev 7. Han, Vester 35. Gjerlev 62. Elbo 8. Hillerslev 36. Nørhald 63. Holmans 9. Hundborg 37. Støvring 64. Brusk 10. Hassing 38. Galten 65. Tyrstrup, Nørre 11. Refs 39. Rougsø 66. Skodborg 12. Morsø Nørre 40. Sønderhald 67. Vandfuld 13. Morsø Sønder 41. Djurs Nørre 68. Hjerm 14. Kær 42. Djurs Sønder 69. Ginding 15. Fleskum 43. Mols 70. Hammerum 16. Hornum 44. Lisbjerg, Øster 71. Ulfborg 17. Hellum 45. Hasle 72. Hind 18. Hindsted 46. Lisbjerg, Vester 73. Bølling 19. Slet 47. Sabro 74. Horne, Nørre 20. Års 48. Framlev 75. Horne, Vester 21. Gislum 49. Ning 76. Horne, Øster 22. Hindborg 50. Hads 77. Skast 23. Harre 51. Hjelmslev 78. Gørding 24. Salling Nørre 52. Gjern 79. Malt 25. Rødding 53. Tyrsting 80. Slavs 26. Fjends 54. Vrads 81. Anst 27. Rinds 55. Vor 82. Ribe 28. Nørlyng Alfabetisk-herreds-register: 81. Anst 8. Hillerslev 36. Nørhald 57. Bjerre 72. Hind 28. Nørlyng 64. Brusk 22. Hindborg 59. Nørvang 73. Bølling 18. Hindsted 34. Onsild 4. Børglum 51. Hjelmslev 11. Refs 41. Djurs Nørre 68. Hjerm 82. Ribe 42. Djurs Sønder 63. Holmans 27. Rinds 3. Dronninglund 74. Horne, Nørre 39.