Arxiv:2003.08959V1 [Physics.Geo-Ph] 19 Mar 2020
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Financial Support for the Development of These Album Pages Provided by Mystic Stamp Company America's Leading Stamp Dealer
SPACE ON STAMPS Created for free use in the public domain American Philatelic Society ©2010 • www.stamps.org Financial support for the development of these album pages provided by Mystic Stamp Company America’s Leading Stamp Dealer and proud of its support of the American Philatelic Society www.MysticStamp.com, 800-433-7811 Space on Stamps ou might say, it all started with the dream of flight and a desire to see the world as the birds do. For tens of thousands of years mankind has watched the stars Yand wondered what they might represent. Possibly the oldest constellation identified by humans as a permanent fixture in the night sky is Ursa Major, the Great Bear, the third largest of the constellations, and best known for the seven stars that make up its rump and tail: the Big Dipper (also known as the Plough or the Wagon). The most helpful of the sky maps, a line drawn though the two outside stars on the bowl of the “dipper” points directly to the North Star. Nothing successfully got human beings above the earth on a repeatable basis, however, until the age of ballooning. The first human to go aloft was a scientist, Pilatre de Rozier, who rose 250 feet into the sky in a hot air balloon and remained suspended above the French countryside for fifteen minutes in October 1783. A month later he and the Marquis d’Arlandes traveled about 5½ miles in the first free flight, using a balloon designed by the Montgolfier brothers. The first North American flight was made January 9, 1793, from Philadelphia to Gloucester County, New Jersey. -

Lessons from Insight for Future Planetary Seismology
Open Archive Toulouse Archive Ouverte (OATAO ) OATAO is an open access repository that collects the wor of some Toulouse researchers and ma es it freely available over the web where possible. This is a publisher's version published in: https://oatao.univ-toulouse.fr/26931 Official URL : https://doi.org/10.1029/2019JE006353 To cite this version : Panning, M. P. and Pike, W. T. and Lognonné, Philippe,... [et al.]On͈Deck Seismology: Lessons from InSight for Future Planetary Seismology. (2020) Journal of Geophysical Research: Planets, 125 (4). ISSN 2169-9097 Any correspondence concerning this service should be sent to the repository administrator: [email protected] RESEARCH ARTICLE On-Deck Seismology: Lessons from InSight for Future 10.1029/2019JE006353 Planetary Seismology Special Section: 1 2 3 1 4 5 InSightatMars M. P. Panning , W. T. Pike , P. Lognonné , W. B. Banerdt , N. Murdoch , D. Banfield , C. Charalambous2 , S. Kedar1, R. D. Lorenz6 , A. G. Marusiak7 , J. B. McClean2,8 ,C. 1 9 2 10 Key Points: Nunn , S. C. Stähler ,A.E.Stott , and T. Warren • Based on InSight recordings, 1 2 atmospheric noise is amplified for Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA, USA, Department of Electrical and seismic sensors on deck, consistent Electronic Engineering, Imperial College London, London, UK, 3Planetology and Space Science Team, Université de with Viking observations Paris, Institut de Physique du Globe, CNRS, Paris, France, 4Department of Electronics, Optronics and Signal Processing, • -

Electron Energetics in the Martian Dayside Ionosphere: Model Comparisons with MAVEN Data Shotaro Sakai1, Laila Andersson2, Thomas E
Electron energetics in the Martian dayside ionosphere: Model comparisons with MAVEN data Shotaro Sakai1, Laila Andersson2, Thomas E. Cravens1, David L. Mitchell3, Christian Mazelle4,5, Ali Rahmati1,3, Christopher M. Fowler2, Stephen W. Bougher6, Edward M. B. Thiemann2, Francis G. Eparvier2, Juan M. Fontenla7, Paul R. Mahaffy8, John E. P. Connerney8, and Bruce M. Jakosky2 1Department of Physics and Astronomy, University of Kansas, Malott Hall, 1251 Wescoe Hall Drive, Lawrence, Kansas 66045, USA 2Laboratory for Atmospheric and Space Physics, University of Colorado Boulder, 1234 Innovation Drive, Boulder, Colorado 80303, USA 3Space Science Laboratory, University of California, 7 Gauss Way, Berkeley, California 94720, USA 4Université de Toulouse, UPS-OMP, IRAP, Toulouse, France 5CNRS, IRAP, 9 Av. Colonel Roche, BP 44346-31028 Toulouse Cedex 4, France 6Department of Atmospheric, Oceanic and Space Sciences, University of Michigan, 2455 Hayward Street, Ann Arbor, Michigan 48109, USA 7NorthWest Research Associates, 3380 Mitchell Ln, Boulder, Colorado 80301, USA 8NASA Goddard Space Flight Center, 8800 Greenbelt Rd, Greenbelt, Maryland 20771, USA Corresponding Author: Thomas E. Cravens, Department of Physics and Astronomy, University of Kansas, Malott Hall, 1251 Wescoe Hall Drive, Lawrence, KS 66045, USA ([email protected]) Main points * High electron temperatures (e.g., 3000 K) can be obtained in the Martian topside ionosphere without invoking solar wind heating. * The magnetic topology is a key factor in determining electron temperatures and photoelectron fluxes at Mars. This is the author manuscript accepted for publication and has undergone full peer review but has not been through the copyediting, typesetting, pagination and proofreading process, which may lead to differences between this version and the Version of Record. -

EDL – Lessons Learned and Recommendations
."#!(*"# 0 1(%"##" !)"#!(*"#* 0 1"!#"("#"#(-$" ."!##("""*#!#$*#( "" !#!#0 1%"#"! /!##"*!###"#" #"#!$#!##!("""-"!"##&!%%!%&# $!!# %"##"*!%#'##(#!"##"#!$$# /25-!&""$!)# %"##!""*&""#!$#$! !$# $##"##%#(# ! "#"-! *#"!,021 ""# !"$!+031 !" )!%+041 #!( !"!# #$!"+051 # #$! !%#-" $##"!#""#$#$! %"##"#!#(- IPPW Enabled International Collaborations in EDL – Lessons Learned and Recommendations: Ethiraj Venkatapathy1, Chief Technologist, Entry Systems and Technology Division, NASA ARC, 2 Ali Gülhan , Department Head, Supersonic and Hypersonic Technologies Department, DLR, Cologne, and Michelle Munk3, Principal Technologist, EDL, Space Technology Mission Directorate, NASA. 1 NASA Ames Research Center, Moffett Field, CA [email protected]. 2 Deutsches Zentrum für Luft- und Raumfahrt e.V. (DLR), German Aerospace Center, [email protected] 3 NASA Langley Research Center, Hampron, VA. [email protected] Abstract of the Proposed Talk: One of the goals of IPPW has been to bring about international collaboration. Establishing collaboration, especially in the area of EDL, can present numerous frustrating challenges. IPPW presents opportunities to present advances in various technology areas. It allows for opportunity for general discussion. Evaluating collaboration potential requires open dialogue as to the needs of the parties and what critical capabilities each party possesses. Understanding opportunities for collaboration as well as the rules and regulations that govern collaboration are essential. The authors of this proposed talk have explored and established collaboration in multiple areas of interest to IPPW community. The authors will present examples that illustrate the motivations for the partnership, our common goals, and the unique capabilities of each party. The first example involves earth entry of a large asteroid and break-up. NASA Ames is leading an effort for the agency to assess and estimate the threat posed by large asteroids under the Asteroid Threat Assessment Project (ATAP). -

Space Sector Brochure
SPACE SPACE REVOLUTIONIZING THE WAY TO SPACE SPACECRAFT TECHNOLOGIES PROPULSION Moog provides components and subsystems for cold gas, chemical, and electric Moog is a proven leader in components, subsystems, and systems propulsion and designs, develops, and manufactures complete chemical propulsion for spacecraft of all sizes, from smallsats to GEO spacecraft. systems, including tanks, to accelerate the spacecraft for orbit-insertion, station Moog has been successfully providing spacecraft controls, in- keeping, or attitude control. Moog makes thrusters from <1N to 500N to support the space propulsion, and major subsystems for science, military, propulsion requirements for small to large spacecraft. and commercial operations for more than 60 years. AVIONICS Moog is a proven provider of high performance and reliable space-rated avionics hardware and software for command and data handling, power distribution, payload processing, memory, GPS receivers, motor controllers, and onboard computing. POWER SYSTEMS Moog leverages its proven spacecraft avionics and high-power control systems to supply hardware for telemetry, as well as solar array and battery power management and switching. Applications include bus line power to valves, motors, torque rods, and other end effectors. Moog has developed products for Power Management and Distribution (PMAD) Systems, such as high power DC converters, switching, and power stabilization. MECHANISMS Moog has produced spacecraft motion control products for more than 50 years, dating back to the historic Apollo and Pioneer programs. Today, we offer rotary, linear, and specialized mechanisms for spacecraft motion control needs. Moog is a world-class manufacturer of solar array drives, propulsion positioning gimbals, electric propulsion gimbals, antenna positioner mechanisms, docking and release mechanisms, and specialty payload positioners. -
Mars Core Structure—Concise Review and Anticipated Insights from Insight George Helffrich
Helffrich Progress in Earth and Planetary Science (2017) 4:24 Progress in Earth and DOI 10.1186/s40645-017-0139-4 Planetary Science REVIEW Open Access Mars core structure—concise review and anticipated insights from InSight George Helffrich Abstract This review summarizes the knowledge of Mars’ interior structure, its inferred composition, and the anticipated seismological properties arising from its composition with particular focus on Mars’ core. The emphasis on the core stems from the unusual morphology of the liquidus diagram of iron at moderate pressures when enriched in sulfur. From a fairly detailed liquidus diagram constructed from experimental studies, I identify a set of processes that could act within Mars’ core: an iron “snow” from the core-mantle boundary’s surface and a Fe3−xS2 “ground fog” forming at the base of the core. Depending on temperature and bulk sulfur composition, these could form an inner core or could stratify the outer core by enriching it in sulfur, or both. Core stratification could be one explanation for the extinction of Mars’ magnetic field early in the planet’s history, and I demonstrate the feasibility of this mechanism. The crystallization processes in the core could be observable in the seismic data that the future Mars geophysical mission, InSight, is planned to provide. The core size, the presence of an inner core, and the wavespeed profile of the outer core, whose radial derivative provides a proxy for changes in composition, are key observables to seek. Keywords: Mars, InSight, Dynamo, Core, Fe-FeS phase relations, Stratification Introduction Consequently, physical parameters provided by astro- The Earth’s density distribution is known principally nomical and orbital measurements yield the only con- through the eigenfrequencies of its whole-body oscil- straints on Mars’ internal structure. -

Sanjay Limaye US Lead-Investigator Ludmila Zasova Russian Lead-Investigator Steering Committee K
Answer to the Call for a Medium-size mission opportunity in ESA’s Science Programme for a launch in 2022 (Cosmic Vision 2015-2025) EuropEan VEnus ExplorEr An in-situ mission to Venus Eric chassEfièrE EVE Principal Investigator IDES, Univ. Paris-Sud Orsay & CNRS Universite Paris-Sud, Orsay colin Wilson Co-Principal Investigator Dept Atm. Ocean. Planet. Phys. Oxford University, Oxford Takeshi imamura Japanese Lead-Investigator sanjay Limaye US Lead-Investigator LudmiLa Zasova Russian Lead-Investigator Steering Committee K. Aplin (UK) S. Lebonnois (France) K. Baines (USA) J. Leitner (Austria) T. Balint (USA) S. Limaye (USA) J. Blamont (France) J. Lopez-Moreno (Spain) E. Chassefière(F rance) B. Marty (France) C. Cochrane (UK) M. Moreira (France) Cs. Ferencz (Hungary) S. Pogrebenko (The Neth.) F. Ferri (Italy) A. Rodin (Russia) M. Gerasimov (Russia) J. Whiteway (Canada) T. Imamura (Japan) C. Wilson (UK) O. Korablev (Russia) L. Zasova (Russia) Sanjay Limaye Ludmilla Zasova Eric Chassefière Takeshi Imamura Colin Wilson University of IKI IDES ISAS/JAXA University of Oxford Wisconsin-Madison Laboratory of Planetary Space Science and Spectroscopy Univ. Paris-Sud Orsay & Engineering Center Space Research Institute CNRS 3-1-1, Yoshinodai, 1225 West Dayton Street Russian Academy of Sciences Universite Paris-Sud, Bat. 504. Sagamihara Dept of Physics Madison, Wisconsin, Profsoyusnaya 84/32 91405 ORSAY Cedex Kanagawa 229-8510 Parks Road 53706, USA Moscow 117997, Russia FRANCE Japan Oxford OX1 3PU Tel +1 608 262 9541 Tel +7-495-333-3466 Tel 33 1 69 15 67 48 Tel +81-42-759-8179 Tel 44 (0)1-865-272-086 Fax +1 608 235 4302 Fax +7-495-333-4455 Fax 33 1 69 15 49 11 Fax +81-42-759-8575 Fax 44 (0)1-865-272-923 [email protected] [email protected] [email protected] [email protected] [email protected] European Venus Explorer – Cosmic Vision 2015 – 2025 List of EVE Co-Investigators NAME AFFILIATION NAME AFFILIATION NAME AFFILIATION AUSTRIA Migliorini, A. -

Insight Spacecraft Launch for Mission to Interior of Mars
InSight Spacecraft Launch for Mission to Interior of Mars InSight is a robotic scientific explorer to investigate the deep interior of Mars set to launch May 5, 2018. It is scheduled to land on Mars November 26, 2018. It will allow us to better understand the origin of Mars. First Launch of Project Orion Project Orion took its first unmanned mission Exploration flight Test-1 (EFT-1) on December 5, 2014. It made two orbits in four hours before splashing down in the Pacific. The flight tested many subsystems, including its heat shield, electronics and parachutes. Orion will play an important role in NASA's journey to Mars. Orion will eventually carry astronauts to an asteroid and to Mars on the Space Launch System. Mars Rover Curiosity Lands After a nine month trip, Curiosity landed on August 6, 2012. The rover carries the biggest, most advanced suite of instruments for scientific studies ever sent to the martian surface. Curiosity analyzes samples scooped from the soil and drilled from rocks to record of the planet's climate and geology. Mars Reconnaissance Orbiter Begins Mission at Mars NASA's Mars Reconnaissance Orbiter launched from Cape Canaveral August 12. 2005, to find evidence that water persisted on the surface of Mars. The instruments zoom in for photography of the Martian surface, analyze minerals, look for subsurface water, trace how much dust and water are distributed in the atmosphere, and monitor daily global weather. Spirit and Opportunity Land on Mars January 2004, NASA landed two Mars Exploration Rovers, Spirit and Opportunity, on opposite sides of Mars. -
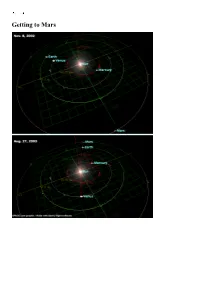
Getting to Mars How Close Is Mars?
Getting to Mars How close is Mars? Exploring Mars 1960-2004 Of 42 probes launched: 9 crashed on launch or failed to leave Earth orbit 4 failed en route to Mars 4 failed to stop at Mars 1 failed on entering Mars orbit 1 orbiter crashed on Mars 6 landers crashed on Mars 3 flyby missions succeeded 9 orbiters succeeded 4 landers succeeded 1 lander en route Score so far: Earthlings 16, Martians 25, 1 in play Mars Express Mars Exploration Rover Mars Exploration Rover Mars Exploration Rover 1: Meridiani (Opportunity) 2: Gusev (Spirit) 3: Isidis (Beagle-2) 4: Mars Polar Lander Launch Window 21: Jun-Jul 2003 Mars Express 2003 Jun 2 In Mars orbit Dec 25 Beagle 2 Lander 2003 Jun 2 Crashed at Isidis Dec 25 Spirit/ Rover A 2003 Jun 10 Landed at Gusev Jan 4 Opportunity/ Rover B 2003 Jul 8 Heading to Meridiani on Sunday Launch Window 1: Oct 1960 1M No. 1 1960 Oct 10 Rocket crashed in Siberia 1M No. 2 1960 Oct 14 Rocket crashed in Kazakhstan Launch Window 2: October-November 1962 2MV-4 No. 1 1962 Oct 24 Rocket blew up in parking orbit during Cuban Missile Crisis 2MV-4 No. 2 "Mars-1" 1962 Nov 1 Lost attitude control - Missed Mars by 200000 km 2MV-3 No. 1 1962 Nov 4 Rocket failed to restart in parking orbit The Mars-1 probe Launch Window 3: November 1964 Mariner 3 1964 Nov 5 Failed after launch, nose cone failed to separate Mariner 4 1964 Nov 28 SUCCESS, flyby in Jul 1965 3MV-4 No. -

Explore Digital.Pdf
EXPLORE “sic itur ad astra” ~ thus you shall go to the stars EXPERTISE FOR THE MISSION We’ve built more interplanetary spacecraft than all other U.S. companies combined. We’re ready for humanity’s next step, for Earth, the Sun, our planets … and beyond. We do this for the New capability explorers. And for us for a new space era Achieving in space takes tenacity. Lockheed Martin brings more We’ve never missed a tight (and finite) capability to the table than ever planetary mission launch window. before, creating better data, new Yet, despite how far we go, the most images and groundbreaking ways to important technologies we develop work. And we’re doing it with smarter improve life now, closer to home. factories and common products, Here on Earth. making our systems increasingly affordable and faster to produce. HALF A CENTURY AT MARS Getting to space is hard. Each step past that is increasingly harder. We’ve been a part of every NASA mission to Mars, and we know what it takes to arrive on another planet and explore. Our proven work includes aeroshells, autonomous deep space operations or building orbiters and landers, like InSight. AEROSHELLS VIKING 1 VIKING 2 PATHFINDER MARS POLAR SPIRIT OPPORTUNITY PHOENIX CURIOSITY INSIGHT MARS 2020 1976 1976 1996 LANDER 2004 2018 2008 2012 2018 2020 1999 ORBITERS MARS OBSERVER MARS GLOBAL MARS CLIMATE MARS ODYSSEY MARS RECONNAISSANCE MAVEN 1993 SURVEYOR ORBITER 2001 ORBITER 2014 1997 1999 2006 LANDERS VIKING 1 VIKING 2 MARS POLAR PHOENIX INSIGHT 1976 1976 LANDER 2008 2018 1999 Taking humans back to the Moon – We bring solutions for our customers that include looking outside our organization to deliver the best science through our spacecraft and operations expertise. -

Mars Insight Launch Press Kit
Introduction National Aeronautics and Space Administration Mars InSight Launch Press Kit MAY 2018 www.nasa.gov 1 2 Table of Contents Table of Contents Introduction 4 Media Services 8 Quick Facts: Launch Facts 12 Quick Facts: Mars at a Glance 16 Mission: Overview 18 Mission: Spacecraft 30 Mission: Science 40 Mission: Landing Site 53 Program & Project Management 55 Appendix: Mars Cube One Tech Demo 56 Appendix: Gallery 60 Appendix: Science Objectives, Quantified 62 Appendix: Historical Mars Missions 63 Appendix: NASA’s Discovery Program 65 3 Introduction Mars InSight Launch Press Kit Introduction NASA’s next mission to Mars -- InSight -- will launch from Vandenberg Air Force Base in California as early as May 5, 2018. It is expected to land on the Red Planet on Nov. 26, 2018. InSight is a mission to Mars, but it is more than a Mars mission. It will help scientists understand the formation and early evolution of all rocky planets, including Earth. A technology demonstration called Mars Cube One (MarCO) will share the launch with InSight and fly separately to Mars. Six Ways InSight Is Different NASA has a long and successful track record at Mars. Since 1965, it has flown by, orbited, landed and roved across the surface of the Red Planet. None of that has been easy. Only about 40 percent of the missions ever sent to Mars by any space agency have been successful. The planet’s thin atmosphere makes landing a challenge; its extreme temperature swings make it difficult to operate on the surface. But if a spacecraft survives the trip, there’s a bounty of science to be collected. -

America's Spaceport
National Aeronautics and Space Administration America’s Spaceport www.nasa.gov America’s Spaceport John F. Kennedy Space Center “This generation does not intend to founder in the backwash of the coming age of space. We mean to be a part of it — we mean to lead it.” President John Fitzgerald Kennedy September 12, 1962 he John F. Kennedy Space Center — America’s Spaceport — is the doorway to upon Spanish treasure ships laden with riches from space. From its unique facilities, humans and machines have begun the exploration the mines of Mexico and Peru. Shoals, reefs and T of the solar system, reaching out to the sun, the moon, the planets and beyond. storms also exacted their toll on the treasure fleets, While these spectacular achievements have fired the imagination of people throughout leaving behind a sunken bonanza now being reaped the world and enriched the lives of millions, they represent only a beginning. At America’s by modern-day treasure hunters. Spaceport, humanity’s long-cherished dream of establishing permanent outposts on the new space frontier is becoming a reality. By the early 18th century, America’s Spaceport Origins echoed with the footsteps of other intruders: Yet, our leap toward the stars is also an epilogue to a rich and colorful past . an almost English settlers and their Indian allies (the latter to forgotten legacy replete with Indian lore, stalwart adventurers, sunken treasure and hardy become known as the Seminoles) from colonies in pioneers. Georgia and South Carolina. Thus began a new era of conflict and expansion that ouldw continue until The sands of America’s Spaceport bear the imprint of New World history from its earliest the end of the Second U.S.