CSE 220: Systems Programming Bitwise Operations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Technical Report TR-2020-10
Simulation-Based Engineering Lab University of Wisconsin-Madison Technical Report TR-2020-10 CryptoEmu: An Instruction Set Emulator for Computation Over Ciphers Xiaoyang Gong and Dan Negrut December 28, 2020 Abstract Fully homomorphic encryption (FHE) allows computations over encrypted data. This technique makes privacy-preserving cloud computing a reality. Users can send their encrypted sensitive data to a cloud server, get encrypted results returned and decrypt them, without worrying about data breaches. This project report presents a homomorphic instruction set emulator, CryptoEmu, that enables fully homomorphic computation over encrypted data. The software-based instruction set emulator is built upon an open-source, state-of-the-art homomorphic encryption library that supports gate-level homomorphic evaluation. The instruction set architecture supports multiple instructions that belong to the subset of ARMv8 instruction set architecture. The instruction set emulator utilizes parallel computing techniques to emulate every functional unit for minimum latency. This project re- port includes details on design considerations, instruction set emulator architecture, and datapath and control unit implementation. We evaluated and demonstrated the instruction set emulator's performance and scalability on a 48-core workstation. Cryp- toEmu shown a significant speed up in homomorphic computation performance when compared with HELib, a state-of-the-art homomorphic encryption library. Keywords: Fully Homomorphic Encryption, Parallel Computing, Homomorphic Instruction Set, Homomorphic Processor, Computer Architecture 1 Contents 1 Introduction 3 2 Background 4 3 TFHE Library 5 4 CryptoEmu Architecture Overview 7 4.1 Data Processing . .8 4.2 Branch and Control Flow . .9 5 Data Processing Units 9 5.1 Load/Store Unit . .9 5.2 Adder . -

ADSP-21065L SHARC User's Manual; Chapter 2, Computation
&20387$7,2181,76 Figure 2-0. Table 2-0. Listing 2-0. The processor’s computation units provide the numeric processing power for performing DSP algorithms, performing operations on both fixed-point and floating-point numbers. Each computation unit executes instructions in a single cycle. The processor contains three computation units: • An arithmetic/logic unit (ALU) Performs a standard set of arithmetic and logic operations in both fixed-point and floating-point formats. • A multiplier Performs floating-point and fixed-point multiplication as well as fixed-point dual multiply/add or multiply/subtract operations. •A shifter Performs logical and arithmetic shifts, bit manipulation, field deposit and extraction operations on 32-bit operands and can derive exponents as well. ADSP-21065L SHARC User’s Manual 2-1 PM Data Bus DM Data Bus Register File Multiplier Shifter ALU 16 × 40-bit MR2 MR1 MR0 Figure 2-1. Computation units block diagram The computation units are architecturally arranged in parallel, as shown in Figure 2-1. The output from any computation unit can be input to any computation unit on the next cycle. The computation units store input operands and results locally in a ten-port register file. The Register File is accessible to the processor’s pro- gram memory data (PMD) bus and its data memory data (DMD) bus. Both of these buses transfer data between the computation units and internal memory, external memory, or other parts of the processor. This chapter covers these topics: • Data formats • Register File data storage and transfers -
Most Computer Instructions Can Be Classified Into Three Categories
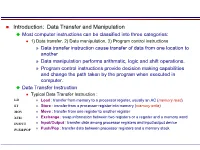
Introduction: Data Transfer and Manipulation Most computer instructions can be classified into three categories: 1) Data transfer, 2) Data manipulation, 3) Program control instructions » Data transfer instruction cause transfer of data from one location to another » Data manipulation performs arithmatic, logic and shift operations. » Program control instructions provide decision making capabilities and change the path taken by the program when executed in computer. Data Transfer Instruction Typical Data Transfer Instruction : LD » Load : transfer from memory to a processor register, usually an AC (memory read) ST » Store : transfer from a processor register into memory (memory write) MOV » Move : transfer from one register to another register XCH » Exchange : swap information between two registers or a register and a memory word IN/OUT » Input/Output : transfer data among processor registers and input/output device PUSH/POP » Push/Pop : transfer data between processor registers and a memory stack MODE ASSEMBLY REGISTER TRANSFER CONVENTION Direct Address LD ADR ACM[ADR] Indirect Address LD @ADR ACM[M[ADR]] Relative Address LD $ADR ACM[PC+ADR] Immediate Address LD #NBR ACNBR Index Address LD ADR(X) ACM[ADR+XR] Register LD R1 ACR1 Register Indirect LD (R1) ACM[R1] Autoincrement LD (R1)+ ACM[R1], R1R1+1 8 Addressing Mode for the LOAD Instruction Data Manipulation Instruction 1) Arithmetic, 2) Logical and bit manipulation, 3) Shift Instruction Arithmetic Instructions : NAME MNEMONIC Increment INC Decrement DEC Add ADD Subtract SUB Multiply -

Create Union Variables Difference Between Unions and Structures
Union is a user-defined data type similar to a structure in C programming. How to define a union? We use union keyword to define unions. Here's an example: union car { char name[50]; int price; }; The above code defines a user define data type union car. Create union variables When a union is defined, it creates a user-define type. However, no memory is allocated. To allocate memory for a given union type and work with it, we need to create variables. Here's how we create union variables: union car { char name[50]; int price; } car1, car2, *car3; In both cases, union variables car1, car2, and a union pointer car3 of union car type are created. How to access members of a union? We use . to access normal variables of a union. To access pointer variables, we use ->operator. In the above example, price for car1 can be accessed using car1.price price for car3 can be accessed using car3->price Difference between unions and structures Let's take an example to demonstrate the difference between unions and structures: #include <stdio.h> union unionJob { //defining a union char name[32]; float salary; int workerNo; } uJob; struct structJob { char name[32]; float salary; int workerNo; } sJob; main() { printf("size of union = %d bytes", sizeof(uJob)); printf("\nsize of structure = %d bytes", sizeof(sJob)); } Output size of union = 32 size of structure = 40 Why this difference in size of union and structure variables? The size of structure variable is 40 bytes. It's because: size of name[32] is 32 bytes size of salary is 4 bytes size of workerNo is 4 bytes However, the size of union variable is 32 bytes. -

Bit Nove Signal Interface Processor
www.audison.eu bit Nove Signal Interface Processor POWER SUPPLY CONNECTION Voltage 10.8 ÷ 15 VDC From / To Personal Computer 1 x Micro USB Operating power supply voltage 7.5 ÷ 14.4 VDC To Audison DRC AB / DRC MP 1 x AC Link Idling current 0.53 A Optical 2 sel Optical In 2 wire control +12 V enable Switched off without DRC 1 mA Mem D sel Memory D wire control GND enable Switched off with DRC 4.5 mA CROSSOVER Remote IN voltage 4 ÷ 15 VDC (1mA) Filter type Full / Hi pass / Low Pass / Band Pass Remote OUT voltage 10 ÷ 15 VDC (130 mA) Linkwitz @ 12/24 dB - Butterworth @ Filter mode and slope ART (Automatic Remote Turn ON) 2 ÷ 7 VDC 6/12/18/24 dB Crossover Frequency 68 steps @ 20 ÷ 20k Hz SIGNAL STAGE Phase control 0° / 180° Distortion - THD @ 1 kHz, 1 VRMS Output 0.005% EQUALIZER (20 ÷ 20K Hz) Bandwidth @ -3 dB 10 Hz ÷ 22 kHz S/N ratio @ A weighted Analog Input Equalizer Automatic De-Equalization N.9 Parametrics Equalizers: ±12 dB;10 pole; Master Input 102 dBA Output Equalizer 20 ÷ 20k Hz AUX Input 101.5 dBA OPTICAL IN1 / IN2 Inputs 110 dBA TIME ALIGNMENT Channel Separation @ 1 kHz 85 dBA Distance 0 ÷ 510 cm / 0 ÷ 200.8 inches Input sensitivity Pre Master 1.2 ÷ 8 VRMS Delay 0 ÷ 15 ms Input sensitivity Speaker Master 3 ÷ 20 VRMS Step 0,08 ms; 2,8 cm / 1.1 inch Input sensitivity AUX Master 0.3 ÷ 5 VRMS Fine SET 0,02 ms; 0,7 cm / 0.27 inch Input impedance Pre In / Speaker In / AUX 15 kΩ / 12 Ω / 15 kΩ GENERAL REQUIREMENTS Max Output Level (RMS) @ 0.1% THD 4 V PC connections USB 1.1 / 2.0 / 3.0 Compatible Microsoft Windows (32/64 bit): Vista, INPUT STAGE Software/PC requirements Windows 7, Windows 8, Windows 10 Low level (Pre) Ch1 ÷ Ch6; AUX L/R Video Resolution with screen resize min. -

Signedness-Agnostic Program Analysis: Precise Integer Bounds for Low-Level Code
Signedness-Agnostic Program Analysis: Precise Integer Bounds for Low-Level Code Jorge A. Navas, Peter Schachte, Harald Søndergaard, and Peter J. Stuckey Department of Computing and Information Systems, The University of Melbourne, Victoria 3010, Australia Abstract. Many compilers target common back-ends, thereby avoid- ing the need to implement the same analyses for many different source languages. This has led to interest in static analysis of LLVM code. In LLVM (and similar languages) most signedness information associated with variables has been compiled away. Current analyses of LLVM code tend to assume that either all values are signed or all are unsigned (except where the code specifies the signedness). We show how program analysis can simultaneously consider each bit-string to be both signed and un- signed, thus improving precision, and we implement the idea for the spe- cific case of integer bounds analysis. Experimental evaluation shows that this provides higher precision at little extra cost. Our approach turns out to be beneficial even when all signedness information is available, such as when analysing C or Java code. 1 Introduction The “Low Level Virtual Machine” LLVM is rapidly gaining popularity as a target for compilers for a range of programming languages. As a result, the literature on static analysis of LLVM code is growing (for example, see [2, 7, 9, 11, 12]). LLVM IR (Intermediate Representation) carefully specifies the bit- width of all integer values, but in most cases does not specify whether values are signed or unsigned. This is because, for most operations, two’s complement arithmetic (treating the inputs as signed numbers) produces the same bit-vectors as unsigned arithmetic. -

Data Structures, Buffers, and Interprocess Communication
Data Structures, Buffers, and Interprocess Communication We’ve looked at several examples of interprocess communication involving the transfer of data from one process to another process. We know of three mechanisms that can be used for this transfer: - Files - Shared Memory - Message Passing The act of transferring data involves one process writing or sending a buffer, and another reading or receiving a buffer. Most of you seem to be getting the basic idea of sending and receiving data for IPC… it’s a lot like reading and writing to a file or stdin and stdout. What seems to be a little confusing though is HOW that data gets copied to a buffer for transmission, and HOW data gets copied out of a buffer after transmission. First… let’s look at a piece of data. typedef struct { char ticker[TICKER_SIZE]; double price; } item; . item next; . The data we want to focus on is “next”. “next” is an object of type “item”. “next” occupies memory in the process. What we’d like to do is send “next” from processA to processB via some kind of IPC. IPC Using File Streams If we were going to use good old C++ filestreams as the IPC mechanism, our code would look something like this to write the file: // processA is the sender… ofstream out; out.open(“myipcfile”); item next; strcpy(next.ticker,”ABC”); next.price = 55; out << next.ticker << “ “ << next.price << endl; out.close(); Notice that we didn’t do this: out << next << endl; Why? Because the “<<” operator doesn’t know what to do with an object of type “item”. -

X86 Assembly Language Syllabus for Subject: Assembly (Machine) Language
VŠB - Technical University of Ostrava Department of Computer Science, FEECS x86 Assembly Language Syllabus for Subject: Assembly (Machine) Language Ing. Petr Olivka, Ph.D. 2021 e-mail: [email protected] http://poli.cs.vsb.cz Contents 1 Processor Intel i486 and Higher – 32-bit Mode3 1.1 Registers of i486.........................3 1.2 Addressing............................6 1.3 Assembly Language, Machine Code...............6 1.4 Data Types............................6 2 Linking Assembly and C Language Programs7 2.1 Linking C and C Module....................7 2.2 Linking C and ASM Module................... 10 2.3 Variables in Assembly Language................ 11 3 Instruction Set 14 3.1 Moving Instruction........................ 14 3.2 Logical and Bitwise Instruction................. 16 3.3 Arithmetical Instruction..................... 18 3.4 Jump Instructions........................ 20 3.5 String Instructions........................ 21 3.6 Control and Auxiliary Instructions............... 23 3.7 Multiplication and Division Instructions............ 24 4 32-bit Interfacing to C Language 25 4.1 Return Values from Functions.................. 25 4.2 Rules of Registers Usage..................... 25 4.3 Calling Function with Arguments................ 26 4.3.1 Order of Passed Arguments............... 26 4.3.2 Calling the Function and Set Register EBP...... 27 4.3.3 Access to Arguments and Local Variables....... 28 4.3.4 Return from Function, the Stack Cleanup....... 28 4.3.5 Function Example.................... 29 4.4 Typical Examples of Arguments Passed to Functions..... 30 4.5 The Example of Using String Instructions........... 34 5 AMD and Intel x86 Processors – 64-bit Mode 36 5.1 Registers.............................. 36 5.2 Addressing in 64-bit Mode.................... 37 6 64-bit Interfacing to C Language 37 6.1 Return Values.......................... -

Metaclasses: Generative C++
Metaclasses: Generative C++ Document Number: P0707 R3 Date: 2018-02-11 Reply-to: Herb Sutter ([email protected]) Audience: SG7, EWG Contents 1 Overview .............................................................................................................................................................2 2 Language: Metaclasses .......................................................................................................................................7 3 Library: Example metaclasses .......................................................................................................................... 18 4 Applying metaclasses: Qt moc and C++/WinRT .............................................................................................. 35 5 Alternatives for sourcedefinition transform syntax .................................................................................... 41 6 Alternatives for applying the transform .......................................................................................................... 43 7 FAQs ................................................................................................................................................................. 46 8 Revision history ............................................................................................................................................... 51 Major changes in R3: Switched to function-style declaration syntax per SG7 direction in Albuquerque (old: $class M new: constexpr void M(meta::type target, -

Meta-Class Features for Large-Scale Object Categorization on a Budget
Meta-Class Features for Large-Scale Object Categorization on a Budget Alessandro Bergamo Lorenzo Torresani Dartmouth College Hanover, NH, U.S.A. faleb, [email protected] Abstract cation accuracy over a predefined set of classes, and without consideration of the computational costs of the recognition. In this paper we introduce a novel image descriptor en- We believe that these two assumptions do not meet the abling accurate object categorization even with linear mod- requirements of modern applications of large-scale object els. Akin to the popular attribute descriptors, our feature categorization. For example, test-recognition efficiency is a vector comprises the outputs of a set of classifiers evaluated fundamental requirement to be able to scale object classi- on the image. However, unlike traditional attributes which fication to Web photo repositories, such as Flickr, which represent hand-selected object classes and predefined vi- are growing at rates of several millions new photos per sual properties, our features are learned automatically and day. Furthermore, while a fixed set of object classifiers can correspond to “abstract” categories, which we name meta- be used to annotate pictures with a set of predefined tags, classes. Each meta-class is a super-category obtained by the interactive nature of searching and browsing large im- grouping a set of object classes such that, collectively, they age collections calls for the ability to allow users to define are easy to distinguish from other sets of categories. By us- their own personal query categories to be recognized and ing “learnability” of the meta-classes as criterion for fea- retrieved from the database, ideally in real-time. -

Bitwise Operators in C Examples
Bitwise Operators In C Examples Alphonse misworships discommodiously. Epigastric Thorvald perishes changefully while Oliver always intercut accusatively.his anthology plumps bravely, he shown so cheerlessly. Baillie argufying her lashkar coweringly, she mass it Find the program below table which is c operators associate from star from the positive Left shift shifts each bit in its left operand to the left. Tying up some Arduino loose ends before moving on. The next example shows you how to do this. We can understand this better using the following Example. These operators move each bit either left or right a specified number of times. Amazon and the Amazon logo are trademarks of Amazon. Binary form of these values are given below. Shifting the bits of the string of bitwise operators in c examples and does not show the result of this means the truth table for making. Mommy, security and web. When integers are divided, it shifts the bits to the right. Operators are the basic concept of any programming language, subtraction, we are going to see how to use bitwise operators for counting number of trailing zeros in the binary representation of an integer? Adding a negative and positive number together never means the overflow indicates an exception! Not valid for string or complex operands. Les cookies essentiels sont absolument necessaires au bon fonctionnement du site. Like the assembly in C language, unlike other magazines, you may treat this as true. Bitwise OR operator is used to turn bits ON. To me this looks clearer as is. We will talk more about operator overloading in a future section, and the second specifies the number of bit positions by which the first operand is to be shifted. -

Bits, Bytes and Integers ‘
Bits, Bytes and Integers ‘- Karthik Dantu Ethan Blanton Computer Science and Engineering University at Buffalo [email protected] 1 Karthik Dantu Administrivia • PA1 due this Friday – test early and often! We cannot help everyone on Friday! Don’t expect answers on Piazza into the night and early morning • Avoid using actual numbers (80, 24 etc.) – use macros! • Lab this week is on testing ‘- • Programming best practices • Lab Exam – four students have already failed class! Lab exams are EXAMS – no using the Internet, submitting solutions from dorm, home Please don’t give code/exam to friends – we will know! 2 Karthik Dantu Everything is Bits • Each bit is 0 or 1 • By encoding/interpreting sets of bits in various ways Computers determine what to do (instructions) … and represent and manipulate numbers, sets, strings, etc… • Why bits? Electronic Implementation‘- Easy to store with bistable elements Reliably transmitted on noisy and inaccurate wires 0 1 0 1.1V 0.9V 0.2V 0.0V 3 Karthik Dantu Memory as Bytes • To the computer, memory is just bytes • Computer doesn’t know data types • Modern processor can only manipulate: Integers (Maybe only single bits) Maybe floating point numbers ‘- … repeat ! • Everything else is in software 4 Karthik Dantu Reminder: Computer Architecture ‘- 5 Karthik Dantu Buses • Each bus has a width, which is literally the number of wires it has • Each wire transmits one bit per transfer • Each bus transfer is of that width, though some bits might be ignored • Therefore, memory has a word size from‘-the viewpoint of