Kinematics Can Help to Discriminate the Implication of Iliopsoas
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Iliopsoas Tendonitis/Bursitis Exercises
ILIOPSOAS TENDONITIS / BURSITIS What is the Iliopsoas and Bursa? The iliopsoas is a muscle that runs from your lower back through the pelvis to attach to a small bump (the lesser trochanter) on the top portion of the thighbone near your groin. This muscle has the important job of helping to bend the hip—it helps you to lift your leg when going up and down stairs or to start getting out of a car. A fluid-filled sac (bursa) helps to protect and allow the tendon to glide during these movements. The iliopsoas tendon can become inflamed or overworked during repetitive activities. The tendon can also become irritated after hip replacement surgery. Signs and Symptoms Iliopsoas issues may feel like “a pulled groin muscle”. The main symptom is usually a catch during certain movements such as when trying to put on socks or rising from a seated position. You may find yourself leading with your other leg when going up the stairs to avoid lifting the painful leg. The pain may extend from the groin to the inside of the thigh area. Snapping or clicking within the front of the hip can also be experienced. Do not worry this is not your hip trying to pop out of socket but it is usually the iliopsoas tendon rubbing over the hip joint or pelvis. Treatment Conservative treatment in the form of stretching and strengthening usually helps with the majority of patients with iliopsoas bursitis. This issue is the result of soft tissue inflammation, therefore rest, ice, anti- inflammatory medications, physical therapy exercises, and/or injections are effective treatment options. -

Body Mechanics 18 Mtj/Massage Therapy Journal Spring 2013 Contraction Is Described Asan Eccentriccontraction Isdescribed Contraction
EXPERT CONTENT Body Mechanics by Joseph E. Muscolino | illustrations by Giovanni Rimasti “Perhaps no muscles are more misunderstood and have more dysfunction attributed to them than the psoas muscles. Looking at the multiple joints that the psoas major crosses, and ... it is easy to see why. PSOAS MAJOR FUNCTION A Biomechanical Examination of the Psoas Major INTRODUCTION MUSCLE BIOMECHANICS The psoas major is a multijoint muscle that spans from A typical muscle attaches from the bone of one body the thoracolumbar spine to the femur. Its proximal part to the bone of an adjacent body part, thereby attachments are the anterolateral bodies of T12-L5 crossing the joint that is located between them (Figure and the discs between, and the anterior surfaces of the 2). The essence of muscle function is that when a muscle transverse processes of L1-L5; its distal attachment is contracts, it creates a pulling force toward its center the lesser trochanter of the femur (Figure 1)(15). Because (14). This pulling force is exerted on its attachments, the psoas major blends distally with the iliacus to attach attempting to pull the two body parts toward each onto the lesser trochanter, these two muscles are often other. There are also resistance forces that oppose the www.amtamassage.org/mtj described collectively as the iliopsoas. Some sources movement of each of the body parts. Most commonly, also include the psoas minor as part of the iliopsoas(5). this resistance force is the force of gravity acting on the Although variations occur for every muscle, including mass of each body part and is equal to the weight of the the psoas major, its attachments are fairly clear. -

Anatomical Study on the Psoas Minor Muscle in Human Fetuses
Int. J. Morphol., 30(1):136-139, 2012. Anatomical Study on the Psoas Minor Muscle in Human Fetuses Estudio Anatómico del Músculo Psoas Menor en Fetos Humanos *Danilo Ribeiro Guerra; **Francisco Prado Reis; ***Afrânio de Andrade Bastos; ****Ciro José Brito; *****Roberto Jerônimo dos Santos Silva & *,**José Aderval Aragão GUERRA, D. R.; REIS, F. P.; BASTOS, A. A.; BRITO, C. J.; SILVA, R. J. S. & ARAGÃO, J. A. Anatomical study on the psoas minor muscle in human fetuses. Int. J. Morphol., 30(1):136-139, 2012. SUMMARY: The anatomy of the psoas minor muscle in human beings has frequently been correlated with ethnic and racial characteristics. The present study had the aim of investigating the anatomy of the psoas minor, by observing its occurrence, distal insertion points, relationship with the psoas major muscle and the relationship between its tendon and muscle portions. Twenty-two human fetuses were used (eleven of each gender), fixed in 10% formol solution that had been perfused through the umbilical artery. The psoas minor muscle was found in eight male fetuses: seven bilaterally and one unilaterally, in the right hemicorpus. Five female fetuses presented the psoas minor muscle: three bilaterally and two unilaterally, one in the right and one in the left hemicorpus. The muscle was independent, inconstant, with unilateral or bilateral presence, with distal insertions at different anatomical points, and its tendon portion was always longer than the belly of the muscle. KEY WORDS: Psoas Muscles; Muscle, Skeletal; Anatomy; Gender Identity. INTRODUCTION When the psoas minor muscle is present in humans, The aim of the present study was to investigate the it is located in the posterior wall of the abdomen, laterally to anatomy of the psoas minor muscle in human fetuses: the lumbar spine and in close contact and anteriorly to the establishing the frequency of its occurrence according to sex; belly of the psoas major muscle (Van Dyke et al., 1987; ascertaining the distal insertion points; analyzing the possible Domingo, Aguilar et al., 2004; Leão et al., 2007). -
Evaluation of Iliopsoas Strain with Findings from Diagnostic Musculoskeletal Ultrasound in Agility Performance Canines – 73 Cases
Evaluation of Iliopsoas Strain with Findings from Diagnostic Musculoskeletal Ultrasound in Agility Performance Canines – 73 Cases Robert E. Cullen DVM 1 Debra A. Canapp DVM, DACVSMR, CCRT 1* 1 Brittany J. Carr DVM 1 David L. Dycus DVM, MS, DACVSSA, CCRP 2 Victor Ibrahim MD 1 Sherman O. Canapp, Jr DVM, MS, DACVSSA, DACVSMR, CCRT 1 Veterinary Orthopedic and Sports Medicine Group, 10975 Guilford Rd, Annapolis Junction, MD 20701 2 Regenerative Orthopedics and Sports Medicine, 600 Pennsylvania Ave SE, Washington, DC 20003 * Corresponding Author ([email protected]) ISSN: 2396-9776 Published: 13 Jun 2017 in: Vol 2, Issue 2 DOI: http://dx.doi.org/10.18849/ve.v2i2.93 Reviewed by: Wanda Gordon-Evans (DVM, PhD, DACVS) and Gillian Monsell (MA, VetMB, PhD, MRCVS) ABSTRACT Objective: Iliopsoas injury and strain is a commonly diagnosed disease process, especially amongst working and sporting canines. There has been very little published literature regarding iliopsoas injuries and there is no information regarding the ultrasound evaluation of abnormal iliopsoas muscles. This manuscript is intended to describe the ultrasound findings in 73 canine agility athletes who had physical examination findings consistent with iliopsoas discomfort. The population was chosen given the high incidence of these animals for the development of iliopsoas injury; likely due to repetitive stress. Methods: Medical records of 73 agility performance canines that underwent musculoskeletal ultrasound evaluation of bilateral iliopsoas muscle groups were retrospectively reviewed. Data included signalment, previous radiographic findings, and ultrasound findings. A 3-tier grading scheme for acute strains was used while the practitioner also evaluated for evidence of chronic injury and bursitis. -

Iliopsoas Pathology, Diagnosis, and Treatment
Iliopsoas Pathology, Diagnosis, and Treatment Christian N. Anderson, MD KEYWORDS Iliopsoas Psoas Coxa saltans interna Snapping hip Iliopsoas bursitis Iliopsoas tendinitis Iliopsoas impingement KEY POINTS The iliopsoas musculotendinous unit is a powerful hip flexor used for normal lower extrem- ity function, but disorders of the iliopsoas can be a significant source of groin pain in the athletic population. Arthroscopic release of the iliopsoas tendon and treatment of coexisting intra-articular ab- normality is effective for patients with painful iliopsoas snapping or impingement that is refractory to conservative treatment. Tendon release has been described at 3 locations: in the central compartment, the periph- eral compartment, and at the lesser trochanter, with similar outcomes observed between the techniques. Releasing the tendon lengthens the musculotendinous unit, resulting in transient hip flexor weakness that typically resolves by 3 to 6 months postoperatively. INTRODUCTION The iliopsoas musculotendinous unit is a powerful hip flexor that is important for normal hip strength and function. Even so, pathologic conditions of the iliopsoas have been implicated as a significant source of anterior hip pain. Iliopsoas disorders have been shown to be the primary cause of chronic groin pain in 12% to 36% of ath- letes and are observed in 25% to 30% of athletes presenting with an acute groin injury.1–4 Described pathologic conditions include iliopsoas bursitis, tendonitis, impingement, and snapping. Acute trauma may result in injury to the musculotendi- nous unit or avulsion fracture of the lesser trochanter. Developing an understanding of the anatomy and function of the musculotendinous unit is necessary to accurately determine the diagnosis and formulate an appropriate treatment strategy for disorders of the iliopsoas. -

Lower Back Pain and the Iliopsoas (PDF)
Low Back Pain and The Iliopsoas Laura Staton, OTR/L, C-IAYT, APD Yoga Bones A Comprehensive Guide to Managing Pain and Orthopedic Injuries Through Yoga Yoga Alliance CE Workshop 4/05/21 [email protected] laurastaton.com IG: luluotyoga FB: Lulu OT + Yoga !1 The Iliopsoas muscle is a deep core muscle and considered a muscle of the posterior abdominal wall. It is comprised of the psoas major (and minor) and the iliacus. Together these muscles are the chief flexors of the thigh. They also help to maintain erect posture of the hip joint. !2 The psoas major is approximately 16” and starts at the base of the ribcage attaching to the five lumbar vertebrae on the transverse process and vertebral bodies. It then travels through the pelvis, merges with the iliacus, and attaches to the lesser trochanter !3of the inner thigh. The Iliacus Muscle lies in the iliac fossa, attaches to the sides of the sacrum and anterior sacroiliac ligaments, and merges with the psoas to attach to the lesser trochanter of the inner thigh. !4 The Psoas Major: With the origin fixed the lower portion flexes the thigh towards the trunk. With the insertion fixed the trunk flexes towards the thigh. The upper portion of the psoas bilaterally extends the spine and unilaterally flexes the trunk. The psoas major acts to extend and laterally flex the lumbar spine. The Iliacus: mainly flexes the thigh and stabilizes the hip joint. It is active with walking and does not flex or extend the lumbar spine. The iliacus has some involvement in abduction and lateral rotation of the femur. -

The Effects of the Rectus Femoris Muscle on Knee and Foot
applied sciences Article The Effects of the Rectus Femoris Muscle on Knee and Foot Kinematics during the Swing Phase of Normal Walking Carlo Albino Frigo 1,* , Christian Wyss 2,3 and Reinald Brunner 2,3 1 Department of Electronics, Information and Bioengineering, Politecnico di Milano, I-20133 Milan, Italy 2 Laboratory for Movement Analysis, University Children’s Hospital, CH-4005 Basel, Switzerland; [email protected] (C.W.); [email protected] (R.B.) 3 Neuro-Orthopaedic Unit, University of Basel, CH-4005 Basel, Switzerland * Correspondence: [email protected] Received: 10 September 2020; Accepted: 5 November 2020; Published: 6 November 2020 Abstract: The role of rectus femoris (RF) muscle during walking was analyzed through musculoskeletal models to understand the effects of muscle weakness and hyperactivity. Such understanding is fundamental when dealing with pathological gait, but the contribution of RF as a bi-articular muscle is particularly difficult to estimate. Anybody software was used for inverse dynamics computation, and SimWise-4D for forward dynamics simulations. RF force was changed in the range of 0 to 150%, and the resulting kinematics were analyzed. Inverse dynamics showed a short positive RF power in correspondence with the onset of knee extension in the swing phase. Forward dynamics simulations showed an increasing knee flexion and initial toe contact when the RF force was decreased, and increasing knee extension and difficult foot clearance when the RF force was increased. The step became shorter with both increased and reduced RF force. In conclusion, the RF actively contributes to the knee extension in the swing phase. -

Psoas Muscle and Lumbar Spine Stability: a Concept Uniting Existing Controversies Critical Review and Hypothesis
Eur Spine J (2000) 9:577–585 © Springer-Verlag 2000 NEW IDEAS L. Penning Psoas muscle and lumbar spine stability: a concept uniting existing controversies Critical review and hypothesis Abstract Psoas muscle (PM) func- tate the LS, will be brought into Received: 12 February 2000 Revised: 12 May 2000 tion with regard to the lumbar spine more lordosis, with maintenance of Accepted: 22 May 2000 (LS) is disputed. Electromyographic vertical position, if a string fastened studies attribute to the PM a possible at its upper end is pulled downward role as stabilizer. Anatomical text- in a very specific direction. Con- books describe the PM as an LS versely, any increase of lordosis of flexor, but not a stabilizer. According the strip brought about by vertical to more recent anatomical studies, downward pushing of its top, will be the PM does not act on the LS, be- stabilized by tightening the pulling cause it tends to pull the LS into string in the same specific direction. more lordosis by simultaneously As this direction corresponded with flexing the lower and extending the the psoas orientation, the experi- upper region, but due to the short ments show that the PM probably moment arms of its fascicles, this functions as a stabilizer of the lor- would require maximal muscular ef- dotic LS in an upright stance by fort and would expose the LS motion adapting the state of contraction of segments to dangerous compression each of its fascicles to the momen- and shear. The findings of the pre- tary degree of lordosis imposed by sent study indicate that the described factors outside the LS, such as gen- opposite action of the PM on upper eral posture, general muscle activity L. -

Snapping Hip Syndrome - Children
Snapping Hip Syndrome - Children What is Snapping Hip Syndrome? Snapping hip syndrome is a commonly seen condition in children and adolescence and in most cases can be treated with basic care and exercises. It is an umbrella term for a variety of causes of hip pain and/or clicking. • Hip pain may cause difficulty when walking and can also be painful to lie on. • With snapping hip syndrome you may experience a clicking or snapping sensation/ sound around the front, back or side of the hip joint. This may be bothersome for you, however if your hip is not painful the click or snap is nothing to be concerned about. In most cases snapping hip is managed conservatively, (no surgical input required), and home treatments may be sufficient in managing the condition. Snapping hip syndrome has two main causes: • External (muscles involved) – There are two main areas where muscles can cause snapping/ clicking. 1. The Iliotibial Band (IT band) which is a thick piece of soft tissue that runs down the outside of your hip joint, into your thigh and ends at your knee. Snapping hip syndrome occurs when the tendon slides over the bony prominence on the outside of your hip and creates a ‘cracking’ or ‘snapping’ sound. This most commonly happens when the tendon is tight following a growth spurt. This may also cause you to have knee pain. 2. The Iliopsoas tendon (muscle at front of hip), which typically causes a snapping sensation in the front part of your hip as the tendon slips over a bit of bone on the pelvis. -

Iliopsoas Release Protocol
Iliopsoas Release Protocol Surgery Date:_____________________________________ • Other o Standard stationary bike without This protocol should be used as a guideline for progression resistance at 3 days post-op (10 min if and should be tailored to the needs of the individual patient. tolerated) o Upper body ergometer, upper body Weight bearing as tolerated – use crutches to normalize strengthening gait. Week 2 Date: ____________________________ • May be needed for 2-4 weeks • Abduction isometrics Gentle emphasis on passive extension exercises. • Superman Aggressive hip flexion strengthening delayed 6 weeks. • ¼ mini squat • Thera band resistance on affected side – Functional progression as tolerated. abduction, adduction, and extension (start very low resistance). Flexion ONLY IF TOLERATED Resumption of full activities as tolerated after 3 months. • Standing heel raises • Other: Always use pharmacologic prophylaxis against o Wall mini-squats heterotopic ossification (unless contraindicated) o Physio-ball mini-squats with co- • Quiz patient contraction Pool exercises (water walking, range of • Must initiate and maintain immediately postop. o motion, march steps, lateral steps, Phase 1: Initial Exercises (Week 1-3) backward walking, mini-squats, heel raises, hamstring and hip flexor Goals of Phase 1 stretches) à Restore range of motion Week 3 Dates: ___________________________ à Diminish pain and inflammation à Prevent muscular inhibition • Manual hamstring stretch à Normalize gait • Stiffness dominant hip mobilization – grades III, IV • -

Unilateral Variant Psoas Major with Split Femoral Nerve
S Journal of O p s e s n Acce Anatomy and Physiological Studies CASE REPORT Unilateral Variant Psoas Major with Split Femoral Nerve Tiraj Parikh*1, Caleb Parry1, Marina Motina1, Shahana Momin1, Rebecca Mickle1, Peter Nguyen1, Aaron Perez1, Cara Fisher PhD2 1Texas College of Osteopathic Medicine 2Center for Anatomical Sciences, University of North Texas Health Science Center Introduction [4]. Psoas tertius is described as a slip of muscle originating from the inner half of the 12th rib and transverse processes of The psoas major muscle includes slips of muscle that originate lumbar vertebrae 1-4 and attaching to the iliopsoas muscle [5]. from the transverse processes of lumbar vertebrae 1-5 and Another study describes their findings of an accessory psoas intervertebral discs of T12-L4. These slips of muscle combine major muscle originating on the left costal process of L3 and and join with the iliacus muscle to then course inferiorly and the intertransverse ligament between L3 and L4 [6]. Although insert onto the lesser trochanter of the femur [1].The psoas rare, these variants have also been shown to split the femoral muscle is considered one of the primary flexors of the hip nerve. It has been proposed that this occurrence is associated joint and is innervated by the femoral nerve, which arises with neuropathies. [5-9]. from ventral rami of lumbar spinal nerves 2-4. The femoral nerve then passes through the psoas major in an inferolateral Case Presentation direction until it emerges on the lateral border of the muscle Here we present a novel variant of the psoas major muscle. -
Training Turnout – Part 3 – Achieving Ultimate Extensions!
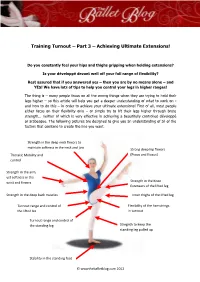
Training Turnout – Part 3 – Achieving Ultimate Extensions! Training Turnout – Part 3 – Achieving Ultimate Extensions! Do you constantly feel your hips and thighs gripping when holding extensions? Is your développé devant well off your full range of flexibility? Rest assured that if you answered yes – then you are by no means alone – and YES! We have lots of tips to help you control your legs in higher ranges! The thing is – many people focus on all the wrong things when they are trying to hold their legs higher – so this article will help you get a deeper understanding of what to work on - and how to do this – in order to achieve your ultimate extensions! First of all, most people either focus on their flexibility only – or simply try to lift their legs higher through brute strength… neither of which is very effective in achieving a beautifully controlled développé or arabesque. The following pictures are designed to give you an understanding of all of the factors that combine to create the line you want. Strength in the deep neck flexors to maintain softness in the neck and jaw Strong deep hip flexors Thoracic Mobility and (Psoas and Iliacus) control Strength in the arm, yet softness in the wrist and fingers Strength in the Knee Extensors of the lifted leg Strength in the deep back muscles Inner thighs of the lifted leg Turnout range and control of Flexibility of the hamstrings the lifted leg in turnout Turnout range and control of the standing leg Stregnth to keep the standing leg pulled up Stability in the standing foot © wwwtheballetblog.com 2012 Training Turnout – Part 3 – Achieving Ultimate Extensions! Now that is a lot to take in all at once! Which is why this is part three of a three part series! Please make sure that you have read the first two PDFs before you start on the exercises in this section.