Lecture 5 - Rotating Reference Frames
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

WUN2K for LECTURE 19 These Are Notes Summarizing the Main Concepts You Need to Understand and Be Able to Apply
Duke University Department of Physics Physics 361 Spring Term 2020 WUN2K FOR LECTURE 19 These are notes summarizing the main concepts you need to understand and be able to apply. • Newton's Laws are valid only in inertial reference frames. However, it is often possible to treat motion in noninertial reference frames, i.e., accelerating ones. • For a frame with rectilinear acceleration A~ with respect to an inertial one, we can write the equation of motion as m~r¨ = F~ − mA~, where F~ is the force in the inertial frame, and −mA~ is the inertial force. The inertial force is a “fictitious” force: it's a quantity that one adds to the equation of motion to make it look as if Newton's second law is valid in a noninertial reference frame. • For a rotating frame: Euler's theorem says that the most general mo- tion of any body with respect to an origin is rotation about some axis through the origin. We define an axis directionu ^, a rate of rotation dθ about that axis ! = dt , and an instantaneous angular velocity ~! = !u^, with direction given by the right hand rule (fingers curl in the direction of rotation, thumb in the direction of ~!.) We'll generally use ~! to refer to the angular velocity of a body, and Ω~ to refer to the angular velocity of a noninertial, rotating reference frame. • We have for the velocity of a point at ~r on the rotating body, ~v = ~! ×~r. ~ dQ~ dQ~ ~ • Generally, for vectors Q, one can write dt = dt + ~! × Q, for S0 S0 S an inertial reference frame and S a rotating reference frame. -

Classical Mechanics - Wikipedia, the Free Encyclopedia Page 1 of 13
Classical mechanics - Wikipedia, the free encyclopedia Page 1 of 13 Classical mechanics From Wikipedia, the free encyclopedia (Redirected from Newtonian mechanics) In physics, classical mechanics is one of the two major Classical mechanics sub-fields of mechanics, which is concerned with the set of physical laws describing the motion of bodies under the Newton's Second Law action of a system of forces. The study of the motion of bodies is an ancient one, making classical mechanics one of History of classical mechanics · the oldest and largest subjects in science, engineering and Timeline of classical mechanics technology. Branches Classical mechanics describes the motion of macroscopic Statics · Dynamics / Kinetics · Kinematics · objects, from projectiles to parts of machinery, as well as Applied mechanics · Celestial mechanics · astronomical objects, such as spacecraft, planets, stars, and Continuum mechanics · galaxies. Besides this, many specializations within the Statistical mechanics subject deal with gases, liquids, solids, and other specific sub-topics. Classical mechanics provides extremely Formulations accurate results as long as the domain of study is restricted Newtonian mechanics (Vectorial to large objects and the speeds involved do not approach mechanics) the speed of light. When the objects being dealt with become sufficiently small, it becomes necessary to Analytical mechanics: introduce the other major sub-field of mechanics, quantum Lagrangian mechanics mechanics, which reconciles the macroscopic laws of Hamiltonian mechanics physics with the atomic nature of matter and handles the Fundamental concepts wave-particle duality of atoms and molecules. In the case of high velocity objects approaching the speed of light, Space · Time · Velocity · Speed · Mass · classical mechanics is enhanced by special relativity. -

Rotating Reference Frame Control of Switched Reluctance
ROTATING REFERENCE FRAME CONTROL OF SWITCHED RELUCTANCE MACHINES A Thesis Presented to The Graduate Faculty of The University of Akron In Partial Fulfillment of the Requirements for the Degree Master of Science Tausif Husain August, 2013 ROTATING REFERENCE FRAME CONTROL OF SWITCHED RELUCTANCE MACHINES Tausif Husain Thesis Approved: Accepted: _____________________________ _____________________________ Advisor Department Chair Dr. Yilmaz Sozer Dr. J. Alexis De Abreu Garcia _____________________________ _____________________________ Committee Member Dean of the College Dr. Malik E. Elbuluk Dr. George K. Haritos _____________________________ _____________________________ Committee Member Dean of the Graduate School Dr. Tom T. Hartley Dr. George R. Newkome _____________________________ Date ii ABSTRACT A method to control switched reluctance motors (SRM) in the dq rotating frame is proposed in this thesis. The torque per phase is represented as the product of a sinusoidal inductance related term and a sinusoidal current term in the SRM controller. The SRM controller works with variables similar to those of a synchronous machine (SM) controller in dq reference frame, which allows the torque to be shared smoothly among different phases. The proposed controller provides efficient operation over the entire speed range and eliminates the need for computationally intensive sequencing algorithms. The controller achieves low torque ripple at low speeds and can apply phase advancing using a mechanism similar to the flux weakening of SM to operate at high speeds. A method of adaptive flux weakening for ensured operation over a wide speed range is also proposed. This method is developed for use with dq control of SRM but can also work in other controllers where phase advancing is required. -

Principle of Relativity and Inertial Dragging
ThePrincipleofRelativityandInertialDragging By ØyvindG.Grøn OsloUniversityCollege,Departmentofengineering,St.OlavsPl.4,0130Oslo, Norway Email: [email protected] Mach’s principle and the principle of relativity have been discussed by H. I. HartmanandC.Nissim-Sabatinthisjournal.Severalphenomenaweresaidtoviolate the principle of relativity as applied to rotating motion. These claims have recently been contested. However, in neither of these articles have the general relativistic phenomenonofinertialdraggingbeeninvoked,andnocalculationhavebeenoffered byeithersidetosubstantiatetheirclaims.HereIdiscussthepossiblevalidityofthe principleofrelativityforrotatingmotionwithinthecontextofthegeneraltheoryof relativity, and point out the significance of inertial dragging in this connection. Although my main points are of a qualitative nature, I also provide the necessary calculationstodemonstratehowthesepointscomeoutasconsequencesofthegeneral theoryofrelativity. 1 1.Introduction H. I. Hartman and C. Nissim-Sabat 1 have argued that “one cannot ascribe all pertinentobservationssolelytorelativemotionbetweenasystemandtheuniverse”. They consider an UR-scenario in which a bucket with water is atrest in a rotating universe,andaBR-scenariowherethebucketrotatesinanon-rotatinguniverseand givefiveexamplestoshowthatthesesituationsarenotphysicallyequivalent,i.e.that theprincipleofrelativityisnotvalidforrotationalmotion. When Einstein 2 presented the general theory of relativity he emphasized the importanceofthegeneralprincipleofrelativity.Inasectiontitled“TheNeedforan -

Static Limit and Penrose Effect in Rotating Reference Frames
1 Static limit and Penrose effect in rotating reference frames A. A. Grib∗ and Yu. V. Pavlov† We show that effects similar to those for a rotating black hole arise for an observer using a uniformly rotating reference frame in a flat space-time: a surface appears such that no body can be stationary beyond this surface, while the particle energy can be either zero or negative. Beyond this surface, which is similar to the static limit for a rotating black hole, an effect similar to the Penrose effect is possible. We consider the example where one of the fragments of a particle that has decayed into two particles beyond the static limit flies into the rotating reference frame inside the static limit and has an energy greater than the original particle energy. We obtain constraints on the relative velocity of the decay products during the Penrose process in the rotating reference frame. We consider the problem of defining energy in a noninertial reference frame. For a uniformly rotating reference frame, we consider the states of particles with minimum energy and show the relation of this quantity to the radiation frequency shift of the rotating body due to the transverse Doppler effect. Keywords: rotating reference frame, negative-energy particle, Penrose effect 1. Introduction The study of relativistic effects related to rotation began immediately after the theory of relativity appeared [1], and such effects are still actively discussed in the literature [2]. The importance of studying such effects is obvious in relation to the Earth’s rotation. In [3], we compared the properties of particles in rotating reference frames in a flat space with the properties of particles in the metric of a rotating black hole. -

Moving Parseval Frames for Vector Bundles
Houston Journal of Mathematics c 2014 University of Houston Volume 40, No. 3, 2014 MOVING PARSEVAL FRAMES FOR VECTOR BUNDLES D. FREEMAN, D. POORE, A. R. WEI, AND M. WYSE Communicated by Vern I. Paulsen Abstract. Parseval frames can be thought of as redundant or linearly de- pendent coordinate systems for Hilbert spaces, and have important appli- cations in such areas as signal processing, data compression, and sampling theory. We extend the notion of a Parseval frame for a fixed Hilbert space to that of a moving Parseval frame for a vector bundle over a manifold. Many vector bundles do not have a moving basis, but in contrast to this every vector bundle over a paracompact manifold has a moving Parseval frame. We prove that a sequence of sections of a vector bundle is a moving Parseval frame if and only if the sections are the orthogonal projection of a moving orthonormal basis for a larger vector bundle. In the case that our vector bundle is the tangent bundle of a Riemannian manifold, we prove that a sequence of vector fields is a Parseval frame for the tangent bundle of a Riemannian manifold if and only if the vector fields are the orthogonal projection of a moving orthonormal basis for the tangent bundle of a larger Riemannian manifold. 1. Introduction Frames for Hilbert spaces are essentially redundant coordinate systems. That is, every vector can be represented as a series of scaled frame vectors, but the series is not unique. Though this redundancy is not necessary in a coordinate system, it can actually be very useful. -

Chapter 6 the Equations of Fluid Motion
Chapter 6 The equations of fluid motion In order to proceed further with our discussion of the circulation of the at- mosphere, and later the ocean, we must develop some of the underlying theory governing the motion of a fluid on the spinning Earth. A differen- tially heated, stratified fluid on a rotating planet cannot move in arbitrary paths. Indeed, there are strong constraints on its motion imparted by the angular momentum of the spinning Earth. These constraints are profoundly important in shaping the pattern of atmosphere and ocean circulation and their ability to transport properties around the globe. The laws governing the evolution of both fluids are the same and so our theoretical discussion willnotbespecifictoeitheratmosphereorocean,butcanandwillbeapplied to both. Because the properties of rotating fluids are often counter-intuitive and sometimes difficult to grasp, alongside our theoretical development we will describe and carry out laboratory experiments with a tank of water on a rotating table (Fig.6.1). Many of the laboratory experiments we make use of are simplified versions of ‘classics’ that have become cornerstones of geo- physical fluid dynamics. They are listed in Appendix 13.4. Furthermore we have chosen relatively simple experiments that, in the main, do nor require sophisticated apparatus. We encourage you to ‘have a go’ or view the atten- dant movie loops that record the experiments carried out in preparation of our text. We now begin a more formal development of the equations that govern the evolution of a fluid. A brief summary of the associated mathematical concepts, definitions and notation we employ can be found in an Appendix 13.2. -
Chapter 2: Minkowski Spacetime
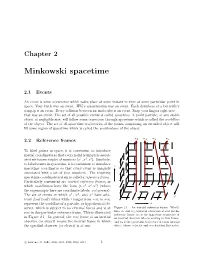
Chapter 2 Minkowski spacetime 2.1 Events An event is some occurrence which takes place at some instant in time at some particular point in space. Your birth was an event. JFK's assassination was an event. Each downbeat of a butterfly’s wingtip is an event. Every collision between air molecules is an event. Snap your fingers right now | that was an event. The set of all possible events is called spacetime. A point particle, or any stable object of negligible size, will follow some trajectory through spacetime which is called the worldline of the object. The set of all spacetime trajectories of the points comprising an extended object will fill some region of spacetime which is called the worldvolume of the object. 2.2 Reference frames w 1 w 2 w 3 w 4 To label points in space, it is convenient to introduce spatial coordinates so that every point is uniquely associ- ated with some triplet of numbers (x1; x2; x3). Similarly, to label events in spacetime, it is convenient to introduce spacetime coordinates so that every event is uniquely t associated with a set of four numbers. The resulting spacetime coordinate system is called a reference frame . Particularly convenient are inertial reference frames, in which coordinates have the form (t; x1; x2; x3) (where the superscripts here are coordinate labels, not powers). The set of events in which x1, x2, and x3 have arbi- x 1 trary fixed (real) values while t ranges from −∞ to +1 represent the worldline of a particle, or hypothetical ob- x 2 server, which is subject to no external forces and is at Figure 2.1: An inertial reference frame. -
The Light Cone and the Conformal Sphere: Differential Invariants And
Light cone and conformal sphere The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Theresa C. Anderson April, 2010 Theresa C. Anderson The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Light cone and conformal sphere Motivation: The recent concept of the group-based moving frame as an equivariant map, introduced by Fels and Olver, has been a useful aid in the quest for differential invariants. The moving frame is used to construct the Maurer-Cartan matrix K; which according to a theorem of Hubert, contains all generators for the differential invariants of a curve. Here we employ the normalization technique of Fels and Olver to construct group-based moving frames for the light cone and the conformal 2-sphere, and we use the moving frame to find the differential invariants. Theresa C. Anderson The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Euclidean space admits a natural action from the Euclidean group, the group of rigid transformations (rotations and translations). Light cone and conformal sphere We first recall the following definition and theorem: A classical moving frame on a n-manifold is a set of n vectors along a curve which is invariant under an action by the group (such as a rigid motion in the Euclidean case). Theresa C. Anderson The Light Cone and the Conformal Sphere: Differential Invariants and their Relations Light cone and conformal sphere We first recall the following definition and theorem: A classical moving frame on a n-manifold is a set of n vectors along a curve which is invariant under an action by the group (such as a rigid motion in the Euclidean case). -

Moving Frames
Moving Frames Peter J. Olver University of Minnesota http://www.math.umn.edu/ ∼ olver Benasque, September 2009 History of Moving Frames Classical contributions: M. Bartels (∼1800), J. Serret, J. Fr´enet, G. Darboux, ´ E. Cotton, El´ ie Cartan Modern developments: (1970’s) S.S. Chern, M. Green, P. Griffiths, G. Jensen, T. Ivey, J. Landsberg, . The equivariant approach: (1997 – ) PJO, M. Fels, G. Mar´ı–Beffa, I. Kogan, J. Cheh, J. Pohjanpelto, P. Kim, M. Boutin, D. Lewis, E. Mansfield, E. Hubert, E. Shemyakova, O. Morozov, R. McLenaghan, R. Smirnov, J. Yue, A. Nikitin, J. Patera, P. Vassiliou, . Moving Frame — Space Curves t b tangent normal binormal dz d2z n t = n = b = t × n ds ds2 s — arc length Fr´enet–Serret equations dt dn db = κ n = − κ t + τ b = − τ n ds ds ds κ — curvature τ — torsion Moving Frame — Space Curves t b tangent normal binormal dz d2z n t = n = b = t × n ds ds2 s — arc length z Fr´enet–Serret equations dt dn db = κ n = − κ t + τ b = − τ n ds ds ds κ — curvature τ — torsion “I did not quite understand how he [Cartan] does this in general, though in the examples he gives the procedure is clear.” “Nevertheless, I must admit I found the book, like most of Cartan’s papers, hard reading.” — Hermann Weyl “Cartan on groups and differential geometry” Bull. Amer. Math. Soc. 44 (1938) 598–601 Applications of Moving Frames • Differential geometry • Equivalence • Symmetry • Differential invariants • Rigidity • Identities and syzygies • Joint invariants and semi-differential invariants • Invariant differential forms and tensors • Integral invariants • Classical invariant theory • Computer vision ◦ object recognition ◦ symmetry detection • Invariant variational problems • Invariant numerical methods • Mechanics, including DNA • Poisson geometry & solitons • Killing tensors in relativity • Invariants of Lie algebras in quantum mechanics • Control theory • Lie pseudo-groups The Basic Equivalence Problem M — smooth m-dimensional manifold. -

Classical Mechanics
Stony Brook University Academic Commons Essential Graduate Physics Department of Physics and Astronomy 2013 Part CM: Classical Mechanics Konstantin Likharev SUNY Stony Brook, [email protected] Follow this and additional works at: https://commons.library.stonybrook.edu/egp Part of the Physics Commons Recommended Citation Likharev, Konstantin, "Part CM: Classical Mechanics" (2013). Essential Graduate Physics. 2. https://commons.library.stonybrook.edu/egp/2 This Book is brought to you for free and open access by the Department of Physics and Astronomy at Academic Commons. It has been accepted for inclusion in Essential Graduate Physics by an authorized administrator of Academic Commons. For more information, please contact [email protected], [email protected]. Konstantin K. Likharev Essential Graduate Physics Lecture Notes and Problems Beta version Open online access at http://commons.library.stonybrook.edu/egp/ and https://sites.google.com/site/likharevegp/ Part CM: Classical Mechanics Last corrections: September 10, 2021 A version of this material was published in 2017 under the title Classical Mechanics: Lecture notes IOPP, Essential Advanced Physics – Volume 1, ISBN 978-0-7503-1398-8, with model solutions of the exercise problems published in 2018 under the title Classical Mechanics: Problems with solutions IOPP, Essential Advanced Physics – Volume 2, ISBN 978-0-7503-1401-5 However, by now this online version of the lecture notes and the problem solutions available from the author, have been better corrected Note also: Konstantin K. Likharev (ed.) Essential Quotes for Scientists and Engineers Springer, 2021, ISBN 978-3-030-63331-8 (see https://essentialquotes.wordpress.com/) © K. -

Moving Frames Astérisque, Tome S131 (1985), P
Astérisque SHIING-SHEN CHERN Moving frames Astérisque, tome S131 (1985), p. 67-77 <http://www.numdam.org/item?id=AST_1985__S131__67_0> © Société mathématique de France, 1985, tous droits réservés. L’accès aux archives de la collection « Astérisque » (http://smf4.emath.fr/ Publications/Asterisque/) implique l’accord avec les conditions générales d’uti- lisation (http://www.numdam.org/conditions). Toute utilisation commerciale ou impression systématique est constitutive d’une infraction pénale. Toute copie ou impression de ce fichier doit contenir la présente mention de copyright. Article numérisé dans le cadre du programme Numérisation de documents anciens mathématiques http://www.numdam.org/ Société Mathématique de France Astérisque, hors série, 1985, p. 67-77 MOVING FRAMES BY Shiing-shen CHERN1 Introduction The method of moving frames has a long history. It is at the heart of kinematics and its conscious application to differential geometry could be traced back at least to SERRET and FRENET2. In his famous "Leçons sur la théorie des surfaces," based on lectures at the Sorbonne 1882-1885, DAR- BOUX had the revolutionary idea using frames depending on two parameters and integrability conditions turn up. DARBOUX'S method was generalized to arbitrary Lie groups by Emile COTTON [14] for the search of differen tial invariants, whose work should be considered a forerunner of the general method of moving frames. CARTAN'S first paper on moving frames was published in 1910 [7]. He im mediately observed that DARBOUX'S partial derivatives should be combined into the "Maurer-Cartan forms" and DARBOUX'S integrability conditions are essentially the Maurer-Cartan equations. This extends the method to the case where the ambient space is acted on by any Lie group and, more generally, by an infinite pseudogroup in CARTAN'S sense, such as the pseu- dogroup of all complex analytic automorphisms in n variables.