Universal Serial Bus Specification
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Single-Chip Geoport Transceiver Datasheet (Rev. B)
SN75LBC776 SINGLE-CHIP GeoPort TRANSCEIVER SLLS221B – NOVEMBER 1995 – REVISED MARCH 2002 D Single-Chip Interface Solution for the DB or DW PACKAGE 9-terminal GeoPort Host (DTE) (TOP VIEW) D Designed to Operate up to 4 Mbit/s Full DA1 1 20 GND Duplex VEE 2 19 VCC D Single 5-V Supply Operation C– 3 18 DY1 D 6-kV ESD Protection on All Terminals C+ 4 17 RY3 5 16 D SHDN RB3 Backward compatible With AppleTalk and DZ2 6 15 RA2 LocalTalk DY2 7 14 RY2 D Combines Multiple Components into a GND 8 13 RB1 Single-chip Solution DEN 9 12 RA1 D Complements the SN75LBC777 9-Terminal DA2 10 11 RY1 GeoPort Peripheral (DCE) Interface Device D LinBiCMOS Process Technology description The SN75LBC776 is a low-power LinBiCMOS device that incorporates the drivers and receivers for a 9-pin GeoPort host interface. GeoPort combines hybrid EIA/TIA-422-B and EIA/TIA-423-B drivers and receivers to transmit data up to four megabits per second (Mbit/s) full duplex. GeoPort is a serial communications standard that is intended to replace the RS-232, Appletalk, and LocalTalk printer ports all in one connector in addition to providing real-time data transfer capability. It provides point-to-point connections between GeoPort-compatible devices with data transmission rates up to 4 Mbit/s full duplex and a hot-plug feature. Applications include connection to telephony, integrated services digital network (ISDN), digital sound and imaging, fax-data modems, and other serial and parallel connections. The GeoPort is backwardly compatible to both LocalTalk and AppleTalk. -

Macintosh Powerbook 100.Pdf
Macintosh PowerBook 100 System Fact Sheet SYSTEM POWER PORTS ADB: 1 Introduced: October 1991 Max. Watts: 17 Video: none Discontinued: August 1992 Amps: 2.00 Floppy: HDI-20 Gestalt ID: 24 BTU Per Hour: 58.14 SCSI: HDI-30 Form Factor: PowerBook 100 Voltage Range: 100-240 GeoPort Connectors: none Weight (lbs.): 5.1 Freq'y Range (Hz): 50-60 Ethernet: none Dimensions (inches): 1.8 H x 11 W x 8.5 D Battery Type: PB100, lead acid Microphone Port Type: none Soft Power Printer Speaker Codename: Asahi, Derringer, Monitor Power Outlet Headphone Oder Number: Modem KB Article #: 8981, 8982 Airport Remote Control Support Discontinued 9/1/98 1 VIDEO Built-in Display: 9" supertwist LCD Maximum Color Bit-depth At: 512 640 640 640 800 832 1024 1152 1280 VRAM Speed: VRAM Needed: Video Configuration: x384 x400 x480 x8702 x600 x624 x768 x870 x1024 n/a built in built-in LCD screen n/a 1 n/a n/a n/a n/a n/a n/a n/a 1 1-bit = Black & White; 2-bit = 4 colors; 4-bit = 16 colors; 8-bit = 256 colors; 16-bit = Thousands; 24-bit = Millions 2 The maximum color depth listed for 640x870 is 8-bit, reflecting the capabilities of the Apple 15" Portrait Display. LOGIC BOARD MEMORY Main Processor: 68000, 16 MHz Memory on Logic Board: 2 MB PMMU: none Minimum RAM: 2 MB FPU: none Maximum RAM: 8 MB Data Path: 16-bit, 16 MHz RAM Slots: 1 PB1xx L1 Cache: none Minimum RAM Speed: 100 ns L2 Cache: none RAM Sizes: 2, 4, 6 MB Secondary Processor: none Install in Groups of: 1 Slots: modem Speech Recognition Supported Supported Macintosh System Software: SOFTWARE A/UX 1.0 NOS 1.11 ProDOS -
Owner's Manual for Mac OS
Warranty Registration: User Manual register online today for a chance to win a FREE Tripp Lite product—www.tripplite.com/warranty USB Serial Adapter for MAC OS 8.6 - 9.x (Software v 2.2) Model: USA-19HS Table of Contents • Introduction • Capabilities • Installation Instructions • Configuring Your Serial Device • Keyspan Serial Assistant • Problem Solving • Appendices • Frequently Asked Questions (FAQs) • Compatibility List for Mac OS • Configuration Examples for Mac OS • Serial Port Pin Outs • TX Ack Advance • Notices • Keyspan Warranty Information Note: This documentation applies to Keyspan's USB Serial Adapter Software for Mac OS 8.6 - 9.x and covers the features and use of this software on that platform. For Mac OS X information and instructions, please read the Keyspan USB Serial Software for Mac OS X User Manual or visit Keyspan's web page <http://www.keyspan.com>. This User Manual applies to the Keyspan USB Serial Adapter Software for Mac OS. Rev 03jul13 Page 1 Keyspan:USB Serial Adapter for Mac OS-v2.2 User Manual 1.1 - Introduction Looking for a way to connect a graphics tablet, modem, GPS receiver, or Palm Organizer to your USB equipped Macintosh computer? The Keyspan USB Serial Adapter is a simple, inexpensive, and reliable way to make the connection. The Adapter plugs into any USB port on your Mac. It provides one DB9 serial port which can be used to connect your Dt. Up to 8 Keyspan USB Serial Adapters may be installed on one CPU if desired. Requirements The Keyspan USB Serial Adapter Software for Mac OS requires the following: • Macintosh: • At least one available USB port • Mac OS 8.6 - 9.x Contents The Keyspan USB Serial Adapter package includes: • Keyspan USB Serial Adapter (USA-19H) • USB cable • Mac and Windows compatible CD with software and user manual This User Manual applies to the Keyspan USB Serial Adapter Software for Mac OS. -

Power Macintosh 5400 Technical Information 1996.Pdf
Specificalions for Power Macintosh 5400 series computers Technical Information Main unit Processor A PowerPC™ 603e processor with the following features: • 180 megahertz (MHz) processor clock • built-in floating point unit (FPU) • 40 MHz system bus • 32 kilobytes (K) internal cache ( 16K data, 16K instruction) Memory • 16 megabytes (MB) of dynamic random-access memory (DRAM), expandable to a maximum of 136 MB in two sockets. The main logic board has 8 MB of DRAM soldered to it, and an 8 MB DRAM DIMM is installed in one of the sockets. DRAM DIMMs installed later should be 64-bit wide, 168-pin fast-paged mode, with 70-nanosecond (ns) RAM access time or faster. • I MB of built-in video RAM • 4 MB of read-only memory (ROM) • 8K of nonvolatile parameter memory • One socket for an optional High Performance Module (256K Level 2 Cache) Internal disk drives The following drives were installed in your computer at the factory: • Apple SuperDrive 1.4 MB high-density floppy disk drive • Apple ATA (AT Attachment) hard disk drive, also known as an Integrated Device Electronics (IDE) hard disk drive • Tray-loading CD-ROM drive (5.25-inch, 1/2-height 8x-speed). Video Graphic modes supported Your Power Macintosh 5400 series computer can display the graphic modes listed in the following table. In addition, your computer can display video input in some modes. Resolution Color depth Vertical scan rate · Video lop~ supp,orted 640 x 480 16-bit 60 Hz and 67 Hz yes 800 x 600 16-bit 60 Hz yes, 8-bit or less color depth 800 x 600 8-bit 72 Hz no 832 x 624 8-bit 75 Hz yes Video output With the optional Apple External Video Connector kit, your computer can be connected to an Apple Video Presentation System or a liquid crystal display (LCD) panel. -
Microprocessors 1 Lecture
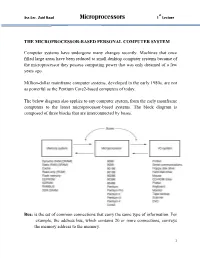
st Ass.Lec. Zaid Raad Microprocessors 1 Lecture THE MICROPROCESSOR-BASED PERSONAL COMPUTER SYSTEM Computer systems have undergone many changes recently. Machines that once filled large areas have been reduced to small desktop computer systems because of the microprocessor they possess computing power that was only dreamed of a few years ago. Million-dollar mainframe computer systems, developed in the early 1980s, are not as powerful as the Pentium Core2-based computers of today. The below diagram also applies to any computer system, from the early mainframe computers to the latest microprocessor-based systems. The block diagram is composed of three blocks that are interconnected by buses. Bus: is the set of common connections that carry the same type of information. For example, the address bus, which contains 20 or more connections, conveys the memory address to the memory. 1 st Ass.Lec. Zaid Raad Microprocessors 1 Lecture The Memory and I/O System The memory structure of all Intel-based personal computers is similar. This includes the first personal computers based upon the 8088, introduced in 1981 by IBM, to the most powerful high speed versions of today The memory system is divided into three main parts: 1. TPA (transient program area), 2. System area 3. XMS (extended memory system). *The type of microprocessor in your computer determines whether an extended memory system exists. If the computer is based upon a really old 8086 or 8088 (a PC or XT), the TPA and systems area exist, but there is no extended memory area. The PC and XT computers contain 640K bytes of TPA and 384K bytes of system memory for a total memory size of 1M bytes. -

Powerbook G3 Series 12.1" (233, 250 Mhz)
PowerBookPowerBook G3G3 SeriesSeries 12.1"12.1" ((233233,, 250250 MHzMHz)) System Fact Sheet SYSTEM POWER PORTS ADB: 1 Introduced: May 1998 Max. Watts: 45 Video: HDI-15 Discontinued: August 1998 Amps: 1.2 Floppy: none Gestalt ID: 314 BTU Per Hour: 153.9 SCSI: HDI-30 Form Factor: PowerBook G3 Series Voltage Range: 100-240 GeoPort Connectors: 1 Weight (lbs.): 7.2 Freq'y Range (Hz): 50-60 Ethernet: 10Base-T Dimensions (inches): 2 H x 12.7 W x 10.4 D Battery Type: 49 WH Lithium Ion Microphone Port Type: PlainTalk Soft Power Printer Speaker Codename: Main Street, Wall Street Monitor Power Outlet Headphone Oder Number: M6359LL/A (233) Modem KB Article #: 24469, 24604 Airport Remote Control Family Model #M4753 24-bit video output port Weight includes modem, battery and SCSI port for connecting up to 7 devices CD-ROM module 1 VIDEO Built-in Display: 12.1" (diagonal) SVGA STN passive-matrix Maximum Color Bit-depth At: 512 640 640 640 800 832 1024 1152 1280 VRAM Speed: VRAM Needed: Video Configuration: x384 x400 x480 x8702 x600 x624 x768 x870 x1024 n/a built-in built-in LCD (2MB VRAM) n/a n/a n/a n/a 16 n/a n/a n/a n/a 1 1-bit = Black & White; 2-bit = 4 colors; 4-bit = 16 colors; 8-bit = 256 colors; 16-bit = Thousands; 24-bit = Millions 2 The maximum color depth listed for 640x870 is 8-bit, reflecting the capabilities of the Apple 15" Portrait Display. LOGIC BOARD MEMORY Main Processor: G3, 233/250 Memory on Logic Board: none PMMU: integrated Minimum RAM: 32 MB FPU: integrated Maximum RAM: 192 MB Data Path: 64-bit, 66/83 MHz RAM Slots: 2 144-pin -

Speed Negotiation Improvement for Hard Disk Drive Serial ATA Interface by Considering Host Compatibility
Speed Negotiation Improvement for Hard Disk Drive Serial ATA Interface by Considering Host Compatibility by Apisak Srihamat A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Microelectronics and Embedded Systems Examination Committee: Dr.Mongkol Ekpanyapong (Chairperson) Dr.Metthew N. Dailey Mak Chee Wai (External Expert) Nationality: Thai Previous Degree: Bachelor in Computer Engineering King Mongkut’s Institute of Technology, Ladkrabang, Thailand Scholarship Donor: Western Digital – AIT Fellowship Asian Institute of Technology School of Engineering and Technology Thailand December 2014 ACKNOWLEDGEMENTS First of all, I would like to thankful to Dr. Mongkol Ekpanyapong and Dr. Matthew N. Dailey who gave a very good guidance and support encouraged me to study and understand the objective, scope and limitations of this thesis. Then continue provide technical discussion to make me have clearer picture. I’m heartily thankful to Dr.Matthew N. Dailey, Dr.Manukid Parnichkun, and Dr.Metha Jeeradit who gave a very good suggestion during I study in AIT. I also would like to show my gratitude to Western Digital who gives me a time, support and job while I am studying master degree. Special appreciation goes to my supervisor at work, Mr. Petrus Hu, shouldering some of the responsibilities on my behalf in order to allow time for me to be away to complete my Masters study. The person I cannot forget, Mr. Mak Chee Wai as the external expert on the committee panel. He provided invaluable feedback, constant encouragement and support during my Masters study. I would like to thanks to my parents and family, who understand and allowed me to have extra time to work on this thesis. -
Apple Logic Board Design LPX-40
Developer Note Apple Logic Board Design LPX-40 Developer Note © Apple Computer, Inc. 1996 Apple Computer, Inc. © 1996 Apple Computer, Inc. LIMITED WARRANTY ON MEDIA AND All rights reserved. REPLACEMENT No part of this publication may be If you discover physical defects in the reproduced, stored in a retrieval manual or in the media on which a software system, or transmitted, in any form or product is distributed, ADC will replace the by any means, mechanical, electronic, media or manual at no charge to you photocopying, recording, or otherwise, provided you return the item to be replaced without prior written permission of with proof of purchase to ADC. Apple Computer, Inc., except to make a backup copy of any documentation ALL IMPLIED WARRANTIES ON THIS provided on CD-ROM. Printed in the MANUAL, INCLUDING IMPLIED United States of America. WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR The Apple logo is a trademark of PURPOSE, ARE LIMITED IN DURATION Apple Computer, Inc. TO NINETY (90) DAYS FROM THE DATE Use of the “keyboard” Apple logo OF THE ORIGINAL RETAIL PURCHASE (Option-Shift-K) for commercial OF THIS PRODUCT. purposes without the prior written consent of Apple may constitute Even though Apple has reviewed this trademark infringement and unfair manual, APPLE MAKES NO WARRANTY competition in violation of federal and OR REPRESENTATION, EITHER EXPRESS state laws. OR IMPLIED, WITH RESPECT TO THIS No licenses, express or implied, are MANUAL, ITS QUALITY, ACCURACY, granted with respect to any of the MERCHANTABILITY, OR FITNESS FOR A technology described in this book. PARTICULAR PURPOSE. -

The System Bus
ELEC 379 : DESIGN OF DIGITAL AND MICROCOMPUTER SYSTEMS 1998/99 WINTER SESSION, TERM 1 The System Bus This lecture describes system buses. These are buses used to interface the CPU with memory and peripherals on separate PC cards. The ISA and PCI buses are used as examples. Introduction characteristics. We will look briefly at two examples of system To increase their flexibility, most general-purpose buses. The ISA (Industrial Standard Architecture) microcomputers include a system bus that allows bus is commonly used in IBM-PC compatibles and printed circuit boards (PCBs) containing memory or is one of the most widely-used system busses. The I/O devices to be connected to the CPU. This allows PCI (Peripheral Component Interconnect) bus is a microcomputer systems to be customized for differ- flexible high-performance peripheral bus that can ef- ent applications. The use of a standard bus also al- ficiently interconnect peripherals and processors of lows manufacturers to produce peripherals that will widely different speeds. work properly with other manufacturers’ computer systems. The system bus consists of a number of parallel Mechanical Characteristics conductors on a backplane or motherboard. There are a number of connectors or “slots” into which Low-cost consumer-grade buses use card-edge con- other PCBs containing memory and I/O devices can nectors to minimize the cost of the peripheral. The be plugged in. plug-in card has contact pads along the edges of the PCB. The motherboard has connectors on the moth- In most cases the system bus is very similar to the erboard that contact these pads. -

The Powerpc Macs: Model by Model
Chapter 13 The PowerPC Macs: Model by Model IN THIS CHAPTER: I The PowerPC chip I The specs for every desktop and portable PowerPC model I What the model numbers mean I Mac clones, PPCP, and the future of PowerPC In March 1994, Apple introduced a completely new breed of Mac — the Power Macintosh. After more than a decade of building Macs around the Motorola 68000, 68020, 68030, and 68040 chips, Apple shifted to a much faster, more powerful microprocessor — the PowerPC chip. From the start, Apple made it clear it was deadly serious about getting these Power Macs into the world; the prices on the original models were low, and prices on the second-generation Power Macs dropped lower still. A well- equipped Power Mac 8500, running at 180 MHz, with 32MB of RAM, a 2 GB hard drive, and a eight-speed CD-ROM drive costs about $500 less than the original Mac SE/30! When the Power Macs were first released, Apple promised that all future Mac models would be based on the PowerPC chip. Although that didn’t immediately prove to be the case — the PowerBook 500 series, the PowerBook 190, and the Quadra 630 series were among the 68040-based machines released after the Power Macs — by the fall of 1996, Macs with four-digit model numbers (PowerPC-based Power Macs, LCs, PowerBooks, and Performas) were the only computers still in production. In less than two years, 429 430 Part II: Secrets of the Machine the Power Mac line has grown to over 45 models. -
Power Macintosh 5500 and 6500 Computers
Developer Note Power Macintosh 5500 and 6500 Computers Developer Note © Apple Computer, Inc. 1997 Apple Computer, Inc. Corporation, used under license © 1997 Apple Computer, Inc. therefrom. All rights reserved. The word SRS is a registered trademark No part of this publication may be of SRS Labs, Inc. reproduced, stored in a retrieval Simultaneously published in the United system, or transmitted, in any form or States and Canada. by any means, mechanical, electronic, photocopying, recording, or otherwise, without prior written permission of LIMITED WARRANTY ON MEDIA AND Apple Computer, Inc., except to make a REPLACEMENT backup copy of any documentation If you discover physical defects in the provided on CD-ROM. Printed in the manual or in the media on which a software United States of America. product is distributed, ADC will replace the The Apple logo is a trademark of media or manual at no charge to you Apple Computer, Inc. provided you return the item to be replaced Use of the “keyboard” Apple logo with proof of purchase to ADC. (Option-Shift-K) for commercial ALL IMPLIED WARRANTIES ON THIS purposes without the prior written MANUAL, INCLUDING IMPLIED consent of Apple may constitute WARRANTIES OF MERCHANTABILITY trademark infringement and unfair AND FITNESS FOR A PARTICULAR competition in violation of federal and PURPOSE, ARE LIMITED IN DURATION state laws. TO NINETY (90) DAYS FROM THE DATE No licenses, express or implied, are OF THE ORIGINAL RETAIL PURCHASE granted with respect to any of the OF THIS PRODUCT. technology described in this book. Even though Apple has reviewed this Apple retains all intellectual property manual, APPLE MAKES NO WARRANTY rights associated with the technology OR REPRESENTATION, EITHER EXPRESS described in this book. -
Apple Module Identification )
) Apple Module Identification ) PN: 072-8124 ) Copyright 1985-1994 by Apple Computer, Inc. June 1994 ( ( ( Module Identification Table of Contents ) Module Index by Page Number ii Cross Reference by Part Number xv CPU PCBs 1 .1 .1 Keyboards 2.1.1 Power Supplies 3.1.1 Interface Cards 4.1.1 Monitors 5.1.1 Drives 6.1.1 Data Communication 7.1.1 ) Printers 8.1.1 Input Devices 9.1.1 Miscellaneous 10.1.1 ) Module Identification Jun 94 Page i Module Index by Page Number Description Page No. CPU PCBs Macintosh Plus Logic Board 1 .1 .1 Macintosh Plus Logic Board 1.1.2 Macintosh II Logic Board 1.2.1 Macintosh II Logic Board 1.2.2 Macintosh IIx Logic Board 1.2.3 Macintosh Ilx Logic Board 1.2.4 Macintosh Ilcx Logic Board 1.2.5 Macintosh Ilcx Logic Board 1.2.6 Apple 256K SIMM, 120 ns 1.3.1 Apple 256K SIMM, DIP, 120 ns 1.3.2 Apple 256K SIMM, SOJ, SO ns 1.3.3 Apple 1 MB SIMM, 120 ns 1.3.4 Apple 1 MB SIMM, DIP, 120 ns 1.3.5 Apple 1 MB SIMM, SOJ, SO ns 1.3.6 Apple 1 MB SIMM, SOJ, SO ns 1.3.7 Apple 1 MB SIMM, SOJ, SO ns, Parity 1.3.S Apple 2 MB SIMM, SOJ, SO ns 1.3.9 Apple 512K SIMM, SOJ, SO ns 1.3.10 Apple 256K SIMM, VRAM, 100 ns 1.3.11 Apple 256K SIMM, VRAM, SO ns 1.3.12 ( Apple 512K SIMM, VRAM 1.3.13 Macintosh/Macintosh Plus ROMs 1.3.14 Macintosh SE and SE/30 ROMs 1.3.15 Macintosh II ROMs 1.3.16 Apple 4 MB SIMM, 60 ns, 72-Pin 1.3.17 Apple S MB SIMM, 60 ns, 72-Pin 1.3.1S Apple 4 MB x 9 SIMM, SO ns, Parity 1.3.19 Apple 12SK SRAM SIMM, 17 ns 1.3.20 Apple 256K SRAM SIMM, 17 ns 1.3.21 Apple 4SK Tag SRAM SIMM, 14 ns 1.3.22 Macintosh SE Logic Board 1.4.1 Macintosh SE Revised Logic Board 1.4.2 Macintosh SE SOOK Logic Board 1.4.3 Macintosh SE Apple SuperDrive Logic Board 1.4.4 Macintosh SE/30 Logic Board 1.4.5 Macintosh SE/30 Logic Board 1.4.6 Macintosh SE Analog Board 1.4.7 Macintosh SE Video Board 1.4.S ( Macintosh Classic Logic Board 1.5.1 Macintosh Classic Power Sweep Board (110 V) Rev.