PILOTS of CONTROL-IMPAIRED AIRCRAFT by ELAINE ANN
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Use of Rudder on Boeing Aircraft
12ADOBL02 December 2011 Use of rudder on Boeing aircraft According to Boeing the Primary uses for rudder input are in crosswind operations, directional control on takeoff or roll out and in the event of engine failure. This Briefing Leaflet was produced in co-operation with Boeing and supersedes the IFALPA document 03SAB001 and applies to all models of the following Boeing aircraft: 707, 717, 727, 737, 747, 757, 767, 777, 787, DC-8, DC-9, DC-10, MD-10, md-11, MD-80, MD-90 Sideslip Angle Fig 1: Rudder induced sideslip Background As part of the investigation of the American Airlines Flt 587 crash on Heading Long Island, USA the United States National Transportation Safety Board (NTSB) issued a safety recommendation letter which called Flight path for pilots to be made aware that the use of “sequential full opposite rudder inputs can potentially lead to structural loads that exceed those addressed by the requirements of certification”. Aircraft are designed and tested based on certain assumptions of how pilots will use the rudder. These assumptions drive the FAA/EASA, and other certifica- tion bodies, requirements. Consequently, this type of structural failure is rare (with only one event over more than 45 years). However, this information about the characteristics of Boeing aircraft performance in usual circumstances may prove useful. Rudder manoeuvring considerations At the outset it is a good idea to review and consider the rudder and it’s aerodynamic effects. Jet transport aircraft, especially those with wing mounted engines, have large and powerful rudders these are neces- sary to provide sufficient directional control of asymmetric thrust after an engine failure on take-off and provide suitable crosswind capability for both take-off and landing. -

Touring Rudder Sit-On Top Kit Kit to Fit Rudder Enabled Sit-On Tops with a 10Mm Rudder Fixing Point
touring rudder sit-on top kit Kit to fit rudder enabled sit-on tops with a 10mm rudder fixing point. Note: It is easier to fit the Touring Rudder System if you have a screw hatch fitted to the rear stowage area of the kayak. If your kayak does not have this screw hatch and you wish to fit one, please contact a Perception dealer for advice. These instructions explain how to fit the rudder kit to a kayak with or without a rear screw hatch in place. Please make sure you follow the correct steps for your version of sit-on top kayak. This kit should contain the following: 1x rudder assembly with up-haul rope & split ring 4x deck fittings 4x length of rudder hose 5x self tapping screws 2x Dyneema control line - with cord end assembly 2x oval toggle 1x pair of Tip-Toes control footrests with foam washers 1x length of 4mm shock cord 6x footrest screws, washers and nuts - pre-fitted 1x rudder park - inc. hook, shock cord & fixing block You will also require some tools to fit this kit: Drill with 3mm, 5mm and 6mm drill bits Marker pen Short phillips screwdriver Wire cutters Small adjustable spanner or pair of pliers Lighter Tape measure Small amount of sticky tape Please read these instructions carefully before fitting! Step 1 - Control line entry points The rudder will need to have two control lines attached, each one running through hose sections inside the kayak from the rudder to the Tip-Toes footrests. This kit has four hose sections (two pairs) as two sections are needed per control line. -

Aerosport Modeling Rudder Trim
AEROSPORT MODELING RUDDER TRIM Segment: MOBILITY PARTS PROVIDERS | Engineering companies Application vertical: MOBILITY AND TRANSPORTATION | AircraFt Application type: FINAL PART: Short runs THE CUSTOMER FINAL PART: SHORT RUNS AEROSPORT MODELING RUDDER TRIM COMPANY DESCRIPTION APPLICATION TRADITIONAL MANUFACTURING Some planes are equipped with small tabs on the control surfaces (e.g., rudder trim Assembly of 26 different machined and standard parts Aerosport Modeling & Design was established in tabs, aileron tabs, elevator tabs) so the pilot can make minute adjustments to pitch, September 1996, and since then, they have worked to yaw, and roll to keep the airplane flying a true, clean line through the air. This produce the highest-possible quality prototypes, improves speed by reducing drag from the larger, constant movements of the full appearance models, working models, and machined rudder, aileron, and elevator. parts, and to meet or exceed client expectations. The company strives to be seen as a partner to their Many airplanes also have rudder and/or aileron trim systems. On some, the rudder clients and an extension of their design and trim tab is rigid but adjustable on the ground by bending: It is angled slightly to the development team, not just a supplier of prototyping left (when viewed from behind) to lessen the need for the pilot to push the rudder services. pedal constantly in order to overcome the left-turning tendencies of many prop- driven aircraft. Some aircraft have hinged rudder trim tabs that the pilot can adjust Aerosport Products spun off from sister company in flight. Aerosport Modeling & Design in 2009 to develop products for experimental aircraft, the first of which When a servo tab is employed, it is moved into the slipstream opposite of the was the RV-10 Carbon Fiber Instrument Panel. -

Vistara Soars Toward Expansion New Flight-Planning Technology Enhances Safety, Cuts Costs
MOBILITY ENGINEERINGTM AUTOMOTIVE, AEROSPACE, OFF-HIGHWAY A quarterly publication of and Vistara soars toward expansion New flight-planning technology enhances safety, cuts costs Base-engine value engineering Deriving optimum efficiency, performance Autos & The Internet of Things How the IoT is disrupting the auto industry Software’s expanding role Escalating software volumes shifting design, systems integration Volume 3, Issue 2 June 2016 ME Molex Ad 0616.qxp_Mobility FP 4/28/16 5:00 PM Page 1 Support Tomorrow’s Speeds with Proven Connectivity Simply Solved In Automotive, consumer demand is changing even faster than technology. When you collaborate with Molex, we can develop a complete solution that will support tomorrow’s data speeds, backed by proven performance. Together, we can simplify your design and manufacturing processes — while minimizing space and maximizing connectivity throughout the vehicle. www.molex.com/a/connectedvehicle/in CONTENTS Features 40 Base-engine value engineering 49 Agility training for cars for higher fuel efficiency and AUTOMOTIVE CHASSIS enhanced performance Chassis component suppliers refine vehicle dynamics at AUTOMOTIVE POWERTRAIN the high end and entry level with four-wheel steering and adaptive damping. Continuous improvement in existing engines can be efficiently achieved with a value engineering approach. The integration of product development with value 52 Evaluating thermal design of engineering ensures the achievement of specified targets construction vehicles in a systematic manner and within a defined timeframe. OFF-HIGHWAY SIMULATION CFD simulation is used to evaluate two critical areas that 43 Integrated system engineering address challenging thermal issues: electronic control units for valvetrain design and and hot-air recirculation. development of a high-speed diesel engine AUTOMOTIVE POWERTRAIN The lead time for engine development has reduced significantly with the advent of advanced simulation Cover techniques. -

United States Patent (19) 11) Patent Number: 4,691,879 Greene 45) Date of Patent: Sep
United States Patent (19) 11) Patent Number: 4,691,879 Greene 45) Date of Patent: Sep. 8, 1987 54 JET AIRPLANE gravity. Full control of the airplane is possible under 76 Inventor: Vibert F. Greene, 19400 Sorenson high maneuverability conditions, extremely high accel Ave., Cupertino, Calif. 95014 erations and at large angles of attack. The delta nose wing creates swirling vortices that contribute substan 21 Appl. No.: 875,024 tially to the lift of the nose section. The winglet, an 22). Filed: Jun. 16, 1986 extension of the delta nose wing, allows the turbulent wake from the leading edge of the delta nose wing to 51 Int. Cl." .............................................. B64C39/08 flow over its upper surface to create additional lift while 52 U.S.C. .................................... 244/45 R; 24.4/13; the midspan wing causes the turbulent flow over its 244/45 A; 244/15 upper surface to form a turbulent wake at its leading 58 Field of Search .................. 244/45 R, 45 A, 4 R, edge. The V-tail delta wing with a V-shaped underside 244/15, 13 and blunt leading edge gives additional lift and control (56) References Cited to the airplane. A flow regulator helps to direct and U.S. PATENT DOCUMENTS control the flow field to the underside of the delta nose D. 138,538 8/1944 Clerc .................................. D12/331 wing and nose strake. There are eight pairs of control D. 155,569 10/1949 Bailey ............ ... D12/331 surfaces including an upper body stabilizer system for 3,447,76 6/1969 Whitener et al. ..................... 244/5 the control and stability of the airplane. -

Water-Tunnel and Analytical Investigation of the Effect of Strake
https://ntrs.nasa.gov/search.jsp?R=19800019803 2020-03-21T17:02:56+00:00Z NASA TP " 1676 NASA Technical Paper 1676 ,.,I c. 1 Water-Tunneland Analytical Investigation of the Effect of Strake Design Variables on Strake VortexBreakdown. Characteristics Neal T. Frink and John E. Lamar AUGUST 1980 TECH LIBRARY KAFB, NM NASA Technical Paper 1676 Water-Tunnel andAnalytical Investigation of the Effect of Strake Design Variables on Strake VortexBreakdown Characteristics Neal T. Frink andJohn E. Lamar Lavzgley Research Cetzter Haznptorz, Virgivzia National Aeronautics and Space Administration Scientific and Technical Information Branch 1980 SUMMARY A systematic water tunnel study was made to determine the vortex breakdown characteristics of43 strakes, more than half of which were generated from a new analytical strake design method. The strakes were mountedon a l/2-scale model of a Langley Research Center general research fighter fuselage mode1 with a 44O leading-edge-sweep trapezoidal wing. This study develops, in conjunction with a common wing-body, a parametric set of strake data for use in establishing and verifying a new strake design procedure. To develop this parametric data base, several series of isolated strakes were designedon the basis of a simplified approach which relates pre- scribed suction and pressure distributions in a simplified flow field to plan- form shapes. The resulting planform shapes provided examples of the effects of the pri- mary design parameters of size, span, and slenderness on the vortex breakdown characteristics. These effects are analyzed in relation to the respective strake leading-edge suction distributions. Included are examples of the effects of detailed strake planform shaping for strakes with the same general size and slenderness. -

09 Stability and Control
Aircraft Design Lecture 9: Stability and Control G. Dimitriadis Introduction to Aircraft Design Stability and Control H Aircraft stability deals with the ability to keep an aircraft in the air in the chosen flight attitude. H Aircraft control deals with the ability to change the flight direction and attitude of an aircraft. H Both these issues must be investigated during the preliminary design process. Introduction to Aircraft Design Design criteria? H Stability and control are not design criteria H In other words, civil aircraft are not designed specifically for stability and control H They are designed for performance. H Once a preliminary design that meets the performance criteria is created, then its stability is assessed and its control is designed. Introduction to Aircraft Design Flight Mechanics H Stability and control are collectively referred to as flight mechanics H The study of the mechanics and dynamics of flight is the means by which : – We can design an airplane to accomplish efficiently a specific task – We can make the task of the pilot easier by ensuring good handling qualities – We can avoid unwanted or unexpected phenomena that can be encountered in flight Introduction to Aircraft Design Aircraft description Flight Control Pilot System Airplane Response Task The pilot has direct control only of the Flight Control System. However, he can tailor his inputs to the FCS by observing the airplane’s response while always keeping an eye on the task at hand. Introduction to Aircraft Design Control Surfaces H Aircraft control -

COURSE INFORMATION M1
AII/1 Standard Wheel Orders All wheel orders given should be repeated by the helmsman and the officer of the watch should ensure that they are carried out correctly and immediately. All wheel orders should be held until countermanded. The helmsman should report immediately if the vessel does not answer the wheel. When there is concern that the helmsman is inattentive s/he should be questioned: "What is your heading ?" And s/he should respond: "My heading is ... degrees." Order Meaning 1. Midships Rudder to be held in the fore and aft position. 2. Port / starboard five 5° of port / starboard rudder to be held. 3. Port / starboard ten 10°of port / starboard rudder to be held. 4. Port / starboard fifteen 15°of port / starboard rudder to be held. 5. Port / starboard twenty 20° of port / starboard rudder to be held. 6. Port / starboard twenty-five 25°of port / starboard rudder to be held. 7. Hard -a-port / starboard Rudder to be held fully over to port / starboard. 8. Nothing to port/starboard Avoid allowing the vessel’s head to go to port/starboard . 9.Meet her Check the swing of the vessel´s head in a turn. 10. Steady Reduce swing as rapidly as possible. 11. Ease to five / ten Reduce amount of rudder to 5°/10°/15°/20° and hold. / fifteen / twenty 12. Steady as she goes Steer a steady course on the compass headin g indicated at the time of the order. The helmsman is to repeat the order and call out the compass heading on receiving the order. -

DESIGN and ANALYSIS of PERFORMANCE PARAMETERS of WING with FLAPERONS Debanjali Dey, R.Aasha #Department of Aeronautical Engineering , KCG College of Technology
International Journal of Scientific Research and Review ISSN NO: 2279-543X DESIGN AND ANALYSIS OF PERFORMANCE PARAMETERS OF WING WITH FLAPERONS Debanjali Dey, R.Aasha #Department of Aeronautical Engineering , KCG College Of Technology. 1. [email protected] 2. [email protected] ABSTRACT- The main objective of this project is to design a flaperon for a wing and compare the performance characteristic of this flaperon-wing combination with that of conventional wing design that makes use of separate flap and aileron. Theoretical analysis and comparison is performed following which the computational analysis is carried out to validate the results. Further aim is to give a clarity on the fact that the use of this high lift device aids in improvising the aerodynamic characteristics of a wing by experimental testing of the wing design incorporated with flaperon, which is designed using a special methodology. Then, modification of wing design can be done to overcome the drawbacks of flaperons if any. INTRODUCTION - When looking at an aircraft, it is easy to observe that they have a number of common features: wings, a tail with vertical and horizontal wing sections, engines to propel them through the air, and a fuselage to carry passengers or cargo. If, however, you take a more critical look beyond the gross features, you also can see subtle, and sometimes not so subtle, differences. The reasons for these differences, why the designers configured them this way, is quite an intriguing study. Today, 100,000 flights will safely crisscross the planet. At no time in history have our lives been so global and full of possibility. -
4 INVENTOR 16%/6/S G
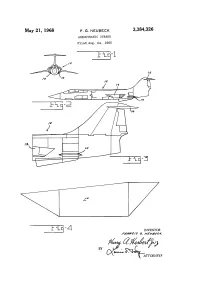
May 21, 1968 F. G., NEUBECK 3,384,326 AERODYNAMIC STRAKE Filed Aug. 24, 1965 - E - - 4 INVENTOR 16%/6/s G. MazMayaea ... it is ATTORNEYsa 3,384,326 United States Patent Office Patented May 21, 1968 1. 2 bination of parts involved in the embodiment of the inven 3,384,326 tion as will appear from the following description and AERODYNAMC STRAKE accompanying drawings, wherein: Francis G. Neubeck, Eglin Air Force Base, Fla. FIG. 1 is a front elevation of the airplane showing the (94.67 Somerset Lane, Cypress, Calif. 90630) 5 angular relationship of the strakes in relation to the ver Filed Aug. 24, 1965, Ser. No. 482,304 tical axis of the airplane; 1 Claim. (CI. 244-13) FIG. 2 is a side elevation of the airplane showing the longitudinal position of a strake; FIG. 3 is an enlarged view of the rear portion of FIG. ABSTRACT OF THE DISCLOSURE 2, and showing with greater clarity the relationship be An elongated aerodynamic strake for use on an air 0 tween the aerodynamic strake and well-known airplane plane, and being in the form of a pentahedral prominence elements; and in plan and joined to and extending from each lower FIG. 4 is an enlarged plan view of the strake only. quarter aft section of the fuselage between the trailing The aerodynamic strake 10, constituting this invention, edge of the wing and the leading edge of the horizontal 5 is joined to the exterior of the fuselage skin on airplane stabilizer to be in the upwash area for improving overall 12, as shown on FIG. -

Aerodynamic Design of the Strake for the Rocket Plane in Tailless Configuration
AERODYNAMIC DESIGN OF THE STRAKE FOR THE ROCKET PLANE IN TAILLESS CONFIGURATION. M. Figat, A. Kwiek, K. Seneńko Warsaw University of Technology Keywords: Optimization, gradient method, strake, CFD Abstract of the MAS. Moreover, the Rocket Plane is able The paper presents results of the to fly at high angles of attack. It is assumed that, aerodynamic design of the Rocket Plane in a it should be equipped with a strake. tailless configuration. It is part of a Modular Airplane System - MAS. The system is devoted to the space tourism and the Rocket Plane is the main component of the system. The main goal of the research was improving aerodynamic characteristic of the Rocket Plane. The paper presents the proposal of modification of the initial Rocket Plane geometry which is being results from the optimization process. The final geometry of the Rocket Plane is resulting of a number of optimization. 1 Introduction Fig. 1 Concept of the MAS Space tourism is a very promising and fast developing branch of an aerospace technology The mission profile of the MAS is [1]. Especially the idea of suborbital tourist presented in Fig. 2. The mission profile of the flights is a very promising concept. The main MAS consists of the following five main advantage of this type of flights is a lower price phases: [1] compare to a tourist visit on the International Take-off Space Station. During a suborbital flight the Objects separation boundary between the Earth’s atmosphere and outer space is crossed, zero gravity condition Climbing and ballistic flight appears due to parabolic trajectory. -

Phoenix Supplement
CONSUMER AEROSPACE Phoenix Rocket Launched R/C Aerobatic Glider Assembly and Operation Manual Supplement HIS sheet contains some recent additions to the Phoenix instructions. Please read them before you Tbegin construction of your Phoenix rocket glider. The following three items are very important, and must be done before you fly your Phoenix. Mandatory Additions Trim Rudder Horn Screws OU must trim the screws that Ymount the rudder horn flush with the outside of the nylon plate. If the screws are not trimmed, it is possible for them to hit the L-7 guides on the launcher during lift off. The rudder may be damaged if this happens. The screws may be cut after assembly with a razor saw or a cut off disc in a Moto-Tool. If you use a cut off disc, be very careful to keep the heat generated by the cut off disc from melting the nylon plate. Trim these screws flush with nylon plate Elevator Pushrod Stiffness HERE are 8 pieces of 3/16” square balsa strip provided in the kit. Before you start assembly, examine all T8 pieces. Due to the high speeds encountered during a Phoenix launch, the pushrods need to be both straight and stiff. The stiffest one should be used for the elevator pushrod, and the next stiffest one for rud- der. The remaining pieces are used for the fuselage corner stock. We use the stiffest balsa that we can obtain for the pushrods, but if you feel the pushrods provided in your kit are not stiff enough, please contact us and we will provide substitutes.