Automated Guideway Transit
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Rapid Transit in Toronto Levyrapidtransit.Ca TABLE of CONTENTS
The Neptis Foundation has collaborated with Edward J. Levy to publish this history of rapid transit proposals for the City of Toronto. Given Neptis’s focus on regional issues, we have supported Levy’s work because it demon- strates clearly that regional rapid transit cannot function eff ectively without a well-designed network at the core of the region. Toronto does not yet have such a network, as you will discover through the maps and historical photographs in this interactive web-book. We hope the material will contribute to ongoing debates on the need to create such a network. This web-book would not been produced without the vital eff orts of Philippa Campsie and Brent Gilliard, who have worked with Mr. Levy over two years to organize, edit, and present the volumes of text and illustrations. 1 Rapid Transit in Toronto levyrapidtransit.ca TABLE OF CONTENTS 6 INTRODUCTION 7 About this Book 9 Edward J. Levy 11 A Note from the Neptis Foundation 13 Author’s Note 16 Author’s Guiding Principle: The Need for a Network 18 Executive Summary 24 PART ONE: EARLY PLANNING FOR RAPID TRANSIT 1909 – 1945 CHAPTER 1: THE BEGINNING OF RAPID TRANSIT PLANNING IN TORONTO 25 1.0 Summary 26 1.1 The Story Begins 29 1.2 The First Subway Proposal 32 1.3 The Jacobs & Davies Report: Prescient but Premature 34 1.4 Putting the Proposal in Context CHAPTER 2: “The Rapid Transit System of the Future” and a Look Ahead, 1911 – 1913 36 2.0 Summary 37 2.1 The Evolving Vision, 1911 40 2.2 The Arnold Report: The Subway Alternative, 1912 44 2.3 Crossing the Valley CHAPTER 3: R.C. -
Introduction of Electronic Commerce
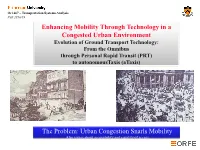
Orf 467 – Transportation Systems Analysis Fall 2018/19 Enhancing Mobility Through Technology in a Congested Urban Environment Evolution of Ground Transport Technology: From the Omnibus through Personal Rapid Transit (PRT) to autonomousTaxis (aTaxis) The Problem: Urban Congestion Snarls Mobility Also issues about accessibility and equality of access Orf 467 – Transportation Systems Analysis Fall 2018/19 Over the years technology has evolved… From: To: Omnibus on Blackfriar’s Bridge, 1798 Hummers ~2007 (Pre Crisis) To: Prius & Tesla 2017 (?????) To: GoogleCars ~ 2017+ ??? Orf 467 – Transportation Systems Analysis Fall 2018/19 Evolution of the OmniBus for intra-urban mass transportation Start: Geo Enhancement: London,1798 NYC, 1830 Technology Elements: • Capacity: ~10 Seated Passengers • Propulsion: Horses or Mules • Externalities: Disease and non-operating revenue from pollution • Suspension: Steel Sprung Wooden Wheel with solid axel • Way: “Flat” Pavement (stone, wood, compacted earth) • Headway & Lateral Control: Human Capacity Enhancement: Propulsion Enhancement: Support Enhancement: Double Decker, London Steam, London Iron (Steel) Rails Orf 467 – Transportation Systems Analysis Fall 2018/19 Growth of Horse-Drawn Street Railway Technology 1850: NYC 1860: London 1875: Minneapolis 1890: Broadway NYC 1908: Washington , GA Week 8 Orf 467 – Transportation Systems Analysis Fall 2018/19 Evolution of Horse-Drawn Street Railway Technology Today: DisneyWorld Orf 467 – Transportation Systems Analysis Fall 2018/19 Growth of Cable Street Railway Technology -

Canadian Rail No189 1967
_il'-.......II ....... D. m~nn No.189 June 1967 ~A CBHA~ C@ M:lLBSTONB ~ info from E.M. Johnson = '§:. Ii) e G~ !, ur cover photograph and the two pictures on the opposite page record a truly historic event for the Canadian Railroad His torical Association -- the first operation of a "museum" locomotive under steam. This very worthy centennial activity has been carried out by our EDMONTON CHAPTER, notwithstanding very limited material resources. As mentioned in an earlier "Canadian Rail", Northern Alberta 2-8-0 No. 73 was moved outside of the Cromdale carbarns of the Edmonton Transit System before Christmas 1966, but this was by filling the boiler with air pressure at 100 pounds per inch squared. This provided sufficient energy to move the locomotive in and out of the barns and served as a cold test of the restored engine's pipes and valves. Recently, the Edmonton Chapter obtained an Alberta Pro vincial boiler inspection certificate and the engine was steamed for the first time since being donated to the Association, on April 29. The accompanying photos were taken on April 30. The engine is in fine condition and reflects great credit on the Edmonton team, led by Harold Maw, which has worked long and hard on the restoration project. One stall of the Cromdale carbarns, now used for buses, has been made available to the C.R.H.A. and houses Edmonton street car No. I, Locomotive No. 73, and other smaller items such as handcars. The carbarns are located immediately alongside the CN's main line leading to the downtown passenger station and are served by a railway spur. -

Innovation in Public Transportation
W Co'" Sf*rts o* A DIRECTORY OF RESEARCH, DEVELOPMENT AND DEMONSTRATION PROJECTS Fiscal Year 1975 U.S. Department of Transportation Urban Mass Transportation Administration Washington, D.C. 20590 For sale by the Superintendent of Documents, U.S. Government Printing Office, Washington, D.C. 20402 - Price $1.80 Stock No. 050-014-00006-1 Introduction This annual publication contains descriptions of through contracts with private firms, or through tion Act of 1964, as amended. The principal current research, development and demonstration working agreements with other Federal depart- method of reporting is through annual publication (RD&D) projects sponsored and funded by the ments and agencies. UMTA generally initiates of the compilation of reports on the status of U.S. Department of Transportation's Urban Mass and plans these RD&D projects and performs individual projects. Transportation Administration (UMTA). analytical tasks as well. The volume dated June 30, 1972 constituted an These projects are conducted under the author- Research projects are intended to produce infor- historical record of all projects funded under the ity of Section 6(a) of the Urban Mass Transporta- mation about possible improvements in urban Act to that point as well as projects funded tion Act of 1964, as amended (78 Stat. 302, 49 mass transportation. The products of research earlier under authorization of the Housing Act of U.S.C. 1601 et. seq.). This statute authorizes the projects are reports or studies. 1961. This volume is available from the National Secretary of Transportation "to undertake re- Technical Information Service (NTIS), access num- Development projects involve fabrication, testing, search, development, and demonstration projects ber PB-2 13-228. -

Canadian Rail No280 1975
No. 280 Ma y 1975 POWER lor the People Text Photographs B.A. Biglow J.J.Shaughnessy oU could say that Canadian National Railways were a little late in die selizing their pass~nger trains.The Y steam engine was quite economical for the tonnages and speeds prevalent at that time and thus the multipur pose steam power was retained for passenger trains and was also avail able for freight services, in emer gencies. The diesel locomotive models designed exclusively for passenger trains, such as the Es and PAs, were avoided, since the passenger version of the 4-axle freight units had been developed when CN be gan passenger train dieselization. Canadian National further avoided large numbers of carbody- style units by using hood-type road-switchers on secondary branch lines. For mainline trains, the Company bought FP 9 models from Gen eral Motors Diesel Limited of London, Ontario and FPA 2 and FPA 4 mo dels from Montreal Locomotive Works of Montr'al, Canada. After almost twenty' years, only one true FPA 2 unit survives,it being on the St-Hilaire/Montr'al, Qu'bec commuter run, Trains 900/991. This unit wos built with a model 244 prime mover, which model Can adian National found to be unreliable due to water leaks. Four other units, Numbers 6758, 6759, 6658 and 6659 had the model 244 prime movers removed and the model 251 installed, making them equivalent to the FPA 4 model. The prime-mover/generator assemblies removed from these units were used to "re-manufacture" the four units of the RSC 24 model, CN unit Numbers 1800, 1801, 1802 and 1803, rated at 1400 hp., of which there are three surviving today. -
Feasibility of Personal Rapid Transit in Ithaca, New York: Final Report
FEASIBILITY OF PERSONAL RAPID TRANSIT IN ITHACA, NEW YORK Final Report Prepared for THE NEW YORK STATE ENERGY RESEARCH AND DEVELOPMENT AUTHORITY Albany, NY Joseph D. Tario, P.E. Senior Project Manager and THE NEW YORK STATE DEPARTMENT OF TRANSPORTATION Albany, NY Gary Frederick, P.E. Office of Technical Services, Director Prepared by C&S ENGINEERS, INC. Syracuse, NY Aileen Maguire Meyer, P.E., AICP Principal Investigator and CONNECT ITHACA Ithaca, NY Robert Morache Principal Investigator Contract Nos. 11101 / C-08-25 September 2010 [blank] NOTICE This report was prepared by C&S Engineers, Inc. and Connect Ithaca in the course of performing work contracted for and sponsored by the New York State Energy Research and Development Authority and the New York State Department of Transportation (hereafter the “Sponsors”). The opinions expressed in this report do not necessarily reflect those of the Sponsors or the State of New York, and reference to any specific product, service, process, or method does not constitute an implied or expressed recommendation or endorsement of it. Further, the Sponsors and the State of New York make no warranties or representations, expressed or implied, as to the fitness for particular purpose or merchantability of any product, apparatus, or service, or the usefulness, completeness, or accuracy of any processes, methods, or other information contained, described, disclosed, or referred to in this report. The Sponsors, the State of New York, and the contractor make no representation that the use of any product, apparatus, process, method, or other information will not infringe privately owned rights and will assume no liability for any loss, injury, or damage resulting from, or occurring in connection with, the use of information contained, described, disclosed, or referred to in this report. -

Personal Rapid Transit (Prt)
ATRA 1989 PRT Report digital format PERSONAL RAPID TRANSIT (PRT) ANOTHER OPTION FOR URBAN TRANSIT? A Report by the Technical Committee on Personal Rapid Transit (PRT) of the Advanced Transit Association, Inc. 1200 18th Street NW, Suite 610 Washington, D.C. 20036 March 1989 ATRA 1989 PRT Report digital format PERSONAL RAPID TRANSIT (PRT) ANOTHER OPTION FOR URBAN TRANSIT? A Report by the Technical Comittee on Personal Rapid Transit (PRT) of the Advanced Transit Association, Inc. 1200 18th Street NW, Suite 610 Washington, D.C. 20036 March 1989 ATRA 1989 PRT Report digital format Officers of the Advanced Transit Association Edward S. Neumann, President George Raikalis, Vice President Jarold A. Kieffer, Treasurer Board Officers Thomas H. Floyd Jr., Chairman Byron Johnson, Chairman, 1986-1989 Jarold A. Kieffer, Secretary The Advanced Transit Association exists to focus attention on unmet urban transportation needs and the ways in which advanced transit concepts can help satisfy them. One of these unmet needs results from the gap between the poor quality of transit service in medium and low-density locations within urban areas and the availability of transit technology that can furnish high quality service at affordable costs. ATRA’s objectives, with particular respect to this report, are to: § Focus public attention on the medium and low density transit problem and the ways in which advanced transit concepts can help solve it; § Seek wider agreement on the main features that advanced transit should possess to cope with this problem, including -

CANADIAN RAIL Postal Permit No
86 ISSN 0008·4875 CANADIAN RAIL Postal Permit No. 40066621 PUBLISHED BI-MONTHLY BY THE CANADIAN RAILROAD HISTORICAL ASSOCIATION TABLE OF CONTENTS History of the Eastern Car Company, by Jay Underwood and Douglas N. W Smith ................................ 87 Atlantic Canada Photo Gallery, By Stan J. Smaill .................................................... ; ...... 102 Business Car ........................................................................................... 118 , FRONT COVER: Boundfor Upper Canada, CNR's first FPA-4 6760 is on the point ofNo 15, the Ocean Limited, as the storied train approaches Folly Lake, Nova Scotia in May 1975. Stan 1 Sma ill PAGE COUVERTURE: En route vers l'Ouest, la locomotive FPA-4 du CN No 6760 est en tetedu train No 15, le« Ocean Limitee », alorsqu'il an-ive aFolley Lake en Nouvelle-Ecosse, enmai 1975. Photo Stan 1 Smaill. BELOW: This outside braced wooden Grand Tiunk box car No.1 05000 was the first car out shopped by the Eastem Car Company in 1913. Jay Underwood collection. CI-DESSOUS: Ce wagon fe/me construit en bois avec renfOit exterieur en acier, Ie No 105000 du Grand Ti-onc, Jut Ie tout premier a etre fabrique parl'usine de fa Eastem Car Co. en 1913. Image de fa collection Jay Unde/wood. For your membership in the CRHA, which Canadian Rail is continually in need of news, stories, INTERIM CO·EDITORS: includes a subscription to Canadian Rail, historical data, photos, maps and other material. Peter Murphy, Douglas N.W. Smith write to: Please send all contributions to Peter Murphy, ASSOCIATE EDITOR (Motive Power): CRHA, 110 Rue St-Pierre, St. Constant, X1-870 Lakeshore Road, Dorval, QC H9S 5X7, Hugues W. -

Evolution of Personal Rapid Transit
October 30, 2009 Evolution of Personal Rapid Transit J. Edward Anderson, Ph.D., P. E. PRT International, LLC Abstract The paper reviews the evolution of the PRT concept from its modern beginning in 1953. The early inventors, the projects, and the response of government are discussed. PRT ac- tivity diminished to almost nothing by 1980, but then revived strongly as a result of activ- ity by the Northeastern Illinois Regional Transportation Authority. Their interest ignited enthusiastic activity on a growing front to the point that today one can truly say that the concept is coming of age. Contents Page Introduction 2 Early Beginnings in the United States 4 The Urban Mass Transportation Administration 8 Activities in Other Countries 10 The Aerospace Corporation 14 U. S. Government Involvement 16 Page from Congressional Record 17 Morgantown 19 Transpo 72 19 1974-1981 21 1981-1990 22 The PRT Program of the Northeastern Illinois Regional 22 Transportation Authority The Future – an RTA Publication 24 An Editorial from the Chicago Tribune 25 Post RTA 25 Today 27 What Have We Learned? 27 Acknowledgements 29 Evolution of this Paper 30 References 31 1 October 30, 2009 Introduction The evolution of Personal Rapid Transit (PRT) can be traced back to at least 1953. Some of the ideas embodied in PRT go back even to the last century, but were premature, briefly flowered and died. Since 1953 the evolution has been continuous, though fluctuating − continuous per- haps mainly because the concept of automatic control, essential to PRT, had been firmly estab- lished by the early 1950’s; and fluctuating for reasons that had little or nothing to do with the technical feasibility of the idea or its potential value to urban society. -
Procedure for the Analysis of Representative AGT Deployments
. HE 10 Extended System Operations ; 1 8.5 5 . A3 7 no Studies for Automated DOT- ransit ISC- Guideway T Systems UMTA- 81-55 Procedure for the Analysis of Representative AGT Deployments R. A. tee GM Transportation Systems Division General Motors Technical Center Warren Ml 48090 DEPARTMENT OF TRATTSFOHTATK>H JUL 81982 LIBRARY FOB 10A BRANCH December 1981 Final Report This document is available to the public through the National Technical Information Service, Springfield, Virginia 22161. U.S. Department of Transportation Urban Mass Transportation Administration Office of Technology Development and Deployment Office of New Systems and Automation Washington DC 20590 This document is disseminated under the sponsorship of the Department of Transportation in the interest of information exchange. The United States Government assumes no liability for its contents or use thereof. The United States Government does not endorse products or manu- facturers. Trade or manufacturers' names appear herein solely because they are considered essential to the object of this report. " /&ST .A 37 Technical Report Documentation Page syvO • 1. Report No. 2. Government Accession No. 3. Recipient's Catalog No. 7SC- UMTA-MA-06-0048-81 -10 77f 4. Title and Subtitle 5. Report Date EXTENDED SYSTEM OPERATIONS STUDIES FOR AUTOMATED December 1981 GUIDEWAY TRANSIT SYSTEMS - Procedure for the Analysis 6. Performing Organization Code DTS-723 of Representative AGT Deployments 8. Performing Organization Report No. 7. Author's) R.A. Lee DOT-TSC-UMTA-81 -55 9. Performing Organization Name and Address 10. Work Unit No. (T RAIS) GM Transportation Systems Division* R2670/UM268 General Motors Corporation 11. Contract or Grant No. -
Request for Proposals
April 20, 2020 REQUEST FOR PROPOSALS FOR Groundwater and Surface Water Monitoring Services for Trenton Commercial Park Nova Scotia Lands Inc. NSLAND113 RFP No.: NSLAND113 Title: Monitoring Services for Trenton Commercial Park Closing Date: May 7, 2020 Table of Contents 1 INTRODUCTION ................................................................................................................ 1 1.1 SUMMARY ..................................................................................................................... 1 1.2 RFP CONTACT .............................................................................................................. 2 1.3 DEBRIEFINGS ................................................................................................................ 2 2 INSTRUCTION TO PROPONENTS .................................................................................... 2 2.1 TIME AND DATE OF BID CLOSING .................................................................................... 2 2.2 SUBMISSION OF BIDS ..................................................................................................... 2 2.3 DEFINITIONS .................................................................................................................. 3 2.4 BID REQUIREMENTS ....................................................................................................... 4 2.4.1 Technical Proposal (65 Points) ................................................................................. 4 2.4.2 Financial Proposal -

Canadian Rail '*='
Canadian Rail '*=' No. 315 APRIL 1978 f I \ \ \ \ • • \ rSSN 0008-4875 Published monthly by The Canadian Railroad Historical Association P.O. Box 22, Station B Montreal Quebec Canada H3B 3J5 EDITOR: M. Peter Murphy EDITOR EMERITUS: S. S. Worthen BUSINESS CAR: John Welsh OFFICIAL CARTOGRAPHER : William A. Germani uk LAYOUT: Michel Paulet CALGARY & SOUTH WESTERN L. M. Unwin, Secretary 1727 23rd Ave. N.W., Calgary Alberta T2M lV6 COVER PHOTO: OTTAWA A pair of class H-5 subway cars D. E. Stoltz, Se cretary newly arrived from Hawker-Siddley P. O. Box 141, Station A, Ottawa, Canada, Ltd. posed in the Davis Ontario K1N 8Vl ville Yard of the TTC . Part of a 138 car, $67 million order, PACIFIC COAST several of the cars are now in R. Keillor, Secretary service and delivery continues P. O. Box 1006, Station A, Vancouver on a regular basis from the British Columbia V6C 2Pl bui 1der. ROCKY MOUNTAIN OPPOSITE: C. K. Hatcher, Secretary Thi sis the way it was back on P. O. Box 6102, Station C, Edmonton July 17, 1948 as TTC Peter Witt Al berta T5B 2NO #2958 and trailer 3013 clattered over the special-work in front TORONTO & YORK DIVISION of Union Station. Although J. C. Kyle, Secretary these type of cars never gained P. O. Bo x 5849, Terminal A, Toronto great popularity in Canada, Ontario M5W 1P3 Toronto depended on the Peter Wi tt type car to provi de the WINDSOR-ESSEX DIVISION backbone of their service for R. Ballard, Sr., Secretary years. Photo courtesy CRHA 300 Cabana Road East, Windsor, Archives, E.A.Toohey Collection.