Low-Voltage Diff Signaling Yields Megatransfers/Second W/Milliwatts
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

RS-485: Still the Most Robust Communication Table of Contents
TUTORIAL RS-485: Still the Most Robust Communication Table of Contents Abstract...........................................................................................................................1 RS-485 vs. RS-422..............................................................................................................................2 An In-Depth Look at RS-485...........................................................................................................3 Challenges of the Industrial Environment.....................................................................................5 Protecting Systems from Harsh Environments.........................................................................5 Conclusion......................................................................................................................10 References......................................................................................................................10 Abstract Despite the rise in popularity of wireless networks, wired serial networks continue to provide the most robust, reliable communication, especially in harsh environments. These well-engineered networks provide effective communication in industrial and building automation applications, which require immunity from noise, electrostatic discharge and voltage faults, all resulting in increased uptime. This tutorial reviews the RS-485 protocol and discusses why it is widely used in industrial applications and the common problems it solves. www.maximintegrated.com -
HD3SS214 8.1Gbps Displayport 1.4 2:1/1:2
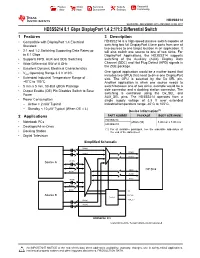
Product Order Technical Tools & Support & Folder Now Documents Software Community HD3SS214 SLAS907B –DECEMBER 2015–REVISED JUNE 2017 HD3SS214 8.1 Gbps DisplayPort 1.4 2:1/1:2 Differential Switch 1 Features 3 Description HD3SS214 is a high-speed passive switch capable of 1• Compatible with DisplayPort 1.4 Electrical Standard switching two full DisplayPort 4 lane ports from one of two sources to one target location in an application. It • 2:1 and 1:2 Switching Supporting Data Rates up will also switch one source to one of two sinks. For to 8.1 Gbps DisplayPort Applications, the HD3SS214 supports • Supports HPD, AUX and DDC Switching switching of the Auxiliary (AUX), Display Data • Wide Differential BW of 8 GHz Channel (DDC) and Hot Plug Detect (HPD) signals in the ZQE package. • Excellent Dynamic Electrical Characteristics • V Operating Range 3.3 V ±10% One typical application would be a mother board that DD includes two GPUs that need to drive one DisplayPort • Extended Industrial Temperature Range of sink. The GPU is selected by the Dx_SEL pin. -40°C to 105°C Another application is when one source needs to • 5 mm x 5 mm, 50-Ball ųBGA Package switch between one of two sinks, example would be a • Output Enable (OE) Pin Disables Switch to Save side connector and a docking station connector. The Power switching is controlled using the Dx_SEL and AUX_SEL pins. The HD3SS214 operates from a • Power Consumption single supply voltage of 3.3 V over extended – Active < 2 mW Typical industrial temperature range -40°C to 105°C. -

Displayport to TMDS Level Shifting Re-Driver Check for Samples: SN75DP139
SN75DP139 www.ti.com SLLS977D –APRIL 2009–REVISED JULY 2013 DisplayPort to TMDS Level Shifting Re-driver Check for Samples: SN75DP139 1FEATURES • DisplayPort Physical Layer Input Port to TMDS • Enhanced ESD: 10kV on All Pins Physical Layer Output Port • Enhanced Commercial Temperature Range: • Integrated TMDS Level Shifting Re-driver With 0°C to 85°C Receiver Equalization • 48 Pin 7 × 7 QFN (RGZ) Package • Supports Data Rates up to 3.4Gbps • 40 Pin 5 x 5 QFN (RSB) Package • Achieves HDMI 1.4b Compliance • 3D HDMI Support With TMDS Clock Rates up APPLICATIONS to 340MHz • Personal Computer Market • 4k x 2k Operation (30Hz, 24bpp) – DP/TMDS Dongle • Deep Color Supporting 36bpp – Desktop PC • Integrated I2C Logic Block for DVI/HDMI – Notebook PC Connector Recognition – Docking Station 2 • Integrated Active I C Buffer – Standalone Video Card DESCRIPTION The SN75DP139 is a Dual-Mode DisplayPort input to Transition-Minimized Differential Signaling (TMDS) output. The TMDS output has a built in level shifting re-driver supporting Digital Video Interface (DVI) 1.0 and High Definition Multimedia Interface (HDMI) 1.4b standards. The SN75DP139 is specified up to a maximum data rate of 3.4Gbps, supporting resolutions greater then 1920x1200 or HDTV 12 bit color depth at 1080p (progressive scan). SN75DP139 is compliant with the HDMI 1.4b specifications and supports optional protocol enhancements such as 3D graphics at resolutions demanding a pixel rate up to 340MHz. An integrated Active I2C buffer isolates the capacitive loading of the source system from that of the sink and interconnecting cable. This isolation improves overall signal integrity of the system and allows for considerable design margin within the source system for DVI / HDMI compliance testing. -
LVDS Application and Data Handbook
LVDS Application and Data Handbook High-Performance Linear Products Technical Staff Literature Number: SLLD009 November 2002 Printed on Recycled Paper IMPORTANT NOTICE Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications, enhancements, improvements, and other changes to its products and services at any time and to discontinue any product or service without notice. Customers should obtain the latest relevant information before placing orders and should verify that such information is current and complete. All products are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment. TI warrants performance of its hardware products to the specifications applicable at the time of sale in accordance with TI’s standard warranty. Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty. Except where mandated by government requirements, testing of all parameters of each product is not necessarily performed. TI assumes no liability for applications assistance or customer product design. Customers are responsible for their products and applications using TI components. To minimize the risks associated with customer products and applications, customers should provide adequate design and operating safeguards. TI does not warrant or represent that any license, either express or implied, is granted under any TI patent right, copyright, mask work right, or other TI intellectual property right relating to any combination, machine, or process in which TI products or services are used. Information published by TI regarding third–party products or services does not constitute a license from TI to use such products or services or a warranty or endorsement thereof. -

Serial ATA Interface
Serial ATA Interface Frank R. Chu Senior Engineer Hitachi Global Storage Technologies June 2003 Why do we need a new interface? Limitations of parallel ATA Serial ATA was designed to overcome a number of limitations of parallel ATA. The most significant limitation of parallel ATA is the difficulty in increasing the data rate beyond 100MB/s. Parallel ATA uses a single-ended signaling system that is prone to induced noise. Increasing the parallel data rate beyond 100 MB/s would require a new signaling system that would not be backward compatible with existing systems. Desktop HDDs can be expected to outrun the 100 Mbytes/sec data rate in the next few years so a new system is needed. An additional limitation is that parallel ATA uses 5V signaling levels and upcoming silicon microelectronic processes are not compatible with 5V signaling. Serial ATA overcomes these issues by moving to 250mV differential signaling method. Differential signaling rejects induced noise. The 250mV differential signal level is compatible with future microelectronic fabrication processes. Parallel ATA Topology Serial ATA Topology Parallel ATA Topology Serial ATA Topology Operating system Operating System Serial ATA ATA Application 1 Application 1 Standard Adapter adapter Disk Driver Application 2 Driver Application 2 Drive Disk Application 3 Disk Disk Application 3 Drive drive drive Forecasts Indicate ATA Dominance ATA is the dominant HDD interface in the industry. The ATA interface market is expected to be approximately 190 million units in 2003, accounting for about 90% of all HDDs shipped, according to International Data Corporations (IDC) 2002/03 forecasts. By 2006, IDC projects ATA unit shipments will increase to beyond 310 million and continue to account for 90% of all HDDs shipments. -

IPUG75 2.2 Table of Contents
PCI Express 2.0 x1, x4 Endpoint IP Core User’s Guide October 2014 IPUG75_2.2 Table of Contents Chapter 1. Introduction .......................................................................................................................... 6 Quick Facts ........................................................................................................................................................... 7 Features ................................................................................................................................................................ 7 PHY Layer.................................................................................................................................................... 7 Data Link Layer............................................................................................................................................ 8 Transaction Layer ........................................................................................................................................ 8 Configuration Space Support....................................................................................................................... 8 Top Level IP Support ................................................................................................................................... 8 Chapter 2. Functional Description ...................................................................................................... 10 Overview ............................................................................................................................................................ -

Getting Started with Your PCI Serial Hardware and Software for Windows 95
Serial Getting Started with Your PCI Serial Hardware and Software for Windows 95 PCI Serial for Windows 95 December 1997 Edition Part Number 321824A-01 Internet Support E-mail: [email protected] FTP Site: ftp.natinst.com Web Address: http://www.natinst.com Bulletin Board Support BBS United States: 512 794 5422 BBS United Kingdom: 01635 551422 BBS France: 01 48 65 15 59 Fax-on-Demand Support 512 418 1111 Telephone Support (USA) Tel: 512 795 8248 Fax: 512 794 5678 International Offices Australia 03 9879 5166, Austria 0662 45 79 90 0, Belgium 02 757 00 20, Brazil 011 288 3336, Canada (Ontario) 905 785 0085, Canada (Québec) 514 694 8521, Denmark 45 76 26 00, Finland 09 725 725 11, France 01 48 14 24 24, Germany 089 741 31 30, Hong Kong 2645 3186, Israel 03 6120092, Italy 02 413091, Japan 03 5472 2970, Korea 02 596 7456, Mexico 5 520 2635, Netherlands 0348 433466, Norway 32 84 84 00, Singapore 2265886, Spain 91 640 0085, Sweden 08 730 49 70, Switzerland 056 200 51 51, Taiwan 02 377 1200, United Kingdom 01635 523545 National Instruments Corporate Headquarters 6504 Bridge Point Parkway Austin, Texas 78730-5039 USA Tel: 512 794 0100 © Copyright 1997 National Instruments Corporation. All rights reserved. Important Information Warranty The serial hardware is warranted against defects in materials and workmanship for a period of two years from the date of shipment, as evidenced by receipts or other documentation. National Instruments will, at its option, repair or replace equipment that proves to be defective during the warranty period. -

LVDS Owner's Manual
LVDS Owner’s Manual Low-Voltage Differential Signaling 3rd Edition, Spring 2004 National Semiconductor The Sight & Sound of Information LVDS Owner’s Manual Low-Voltage Differential Signaling Spring 2004 3rd Edition The last thing an engineer ever does is read the owner’s manual. An engineer expects to be able to use his or her skills and training to figure out how to use a product without ever referring to the instructions. In my experience, either through intuition or trial and error, most of us will eventually figure out the basics. However, while this may be reasonable for assembling a toy or even working on a car, it is an expensive and time consuming way to go about electrical engineering. National Semiconductor has written this LVDS Owner’s Manual to assist you. This design guide compiles the information and concepts that we think you will need to save you valuable time and money and maximize the benefit of using National's Low-Voltage Differential Signaling (LVDS) solutions. National is the premier analog semiconductor solution supplier and the innovator of LVDS. Our experi- ence with LVDS gives us the insight to be your trusted advisor. This third edition of the LVDS Owner’s Manual is an easy-to-read compendium that contains useful information for everyone. There is an intro- duction to the technology, concepts, and applications for someone just starting to design with LVDS. We offer guidance on how to select the right LVDS device and family for your application whether it is chip- to-chip, mezzanine-to-mezzanine, or box-to-box. -

Single-Port PCI Card— RS-232/422/485/530
NOVEMBER 2001 IC073C IC074C-R2 Single-Port PCI Card— RS-232/422/485/530 CUSTOMER Order toll-free in the U.S. 24 hours, 7 A.M. Monday to midnight Friday: 877-877-BBOX SUPPORT FREE technical support, 24 hours a day, 7 days a week: Call 724-746-5500 or fax 724-746-0746 INFORMATION Mail order: Black Box Corporation, 1000 Park Drive, Lawrence, PA 15055-1018 Web site: www.blackbox.com • E-mail: [email protected] TRADEMARKS TRADEMARKS USED IN THIS MANUAL OS/2 and PS/2 are registered trademarks of International Business Machines Corporation. Windows and Windows NT are registered trademarks of Microsoft Corporation. UL is a registered trademark of Underwriters Laboratories Incorporated. Any other trademarks used in this manual are acknowledged to be the property of the trademark owners. 1 SINGLE-PORT PCI CARD—RS-232/422/485/530 FEDERAL COMMUNICATIONS COMMISSION AND INDUSTRY CANADA RADIO FREQUENCY INTERFERENCE STATEMENTS This equipment generates, uses, and can radiate radio frequency energy and if not installed and used properly, that is, in strict accordance with the manufacturer’s instructions, may cause interference to radio communication. It has been tested and found to comply with the limits for a Class A computing device in accordance with the specifications in Subpart B of Part 15 of FCC rules, which are designed to provide reasonable protection against such interference when the equipment is operated in a commercial environment. Operation of this equipment in a residential area is likely to cause interference, in which case the user at his own expense will be required to take whatever measures may be necessary to correct the interference. -
Getting Started with Modbus March 31, 2020
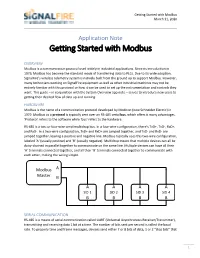
Getting Started with Modbus March 31, 2020 Application Note Getting Started with Modbus OVERVIEW Modbus is a communication protocol used widely in industrial applications. Since its introduction in 1979, Modbus has become the standard mode of transferring data to PLCs. Due to its wide adoption, SignalFire’s wireless telemetry system is natively built from the ground up to support Modbus. However, many technicians working on SignalFire equipment as well as other industrial machines may not be entirely familiar with this protocol or how it can be used to set up the instrumentation and controls they want. This guide – in conjunction with the System Overview app note – serves to introduce new users to getting their desired flow of data up and running. HARDWARE Modbus is the name of a communication protocol developed by Modicon (now Schneider Electric) in 1979. Modbus as a protocol is typically sent over an RS-485 serial bus, which offers it many advantages. ‘Protocol’ refers to the software while ‘bus’ refers to the hardware. RS-485 is a two or four-wire serial multidrop bus. In a four-wire configuration, there’s TxD+, TxD-, RxD+, and RxD-. In a two-wire configuration, TxD+ and RxD+ are jumped together, and TxD- and RxD- are jumped together, leaving a positive and negative line. Modbus typically uses this two-wire configuration, labeled ‘A’ (usually positive) and ‘B’ (usually negative). Multidrop means that multiple devices can all be daisy-chained in parallel together to communicate on the same line. Multiple devices can have all their ‘A’ terminals connected together, and all their ‘B’ terminals connected together to communicate with each other, making the wiring simple. -
FUSB1500 — USB2.0 Full-Speed / Low-Speed Transceiver with Charger Detection
FUSB1500 / FUSB1501 — USB2.0 Full-Speed April 2011 FUSB1500 — USB2.0 Full-Speed / Low-Speed Transceiver with Charger Detection Features Description . Complies with USB2.0 Specification The FUSB1500 is a USB2.0 FS/LS transceiver with resistive charger detection. It is compliant with the . Supports 12Mbps and 1.5Mbps USB2.0 Speeds Universal Serial Bus Specification, Rev. 2.0 (USB2.0). - Single Ended (SE) Mode Signaling Ideal for portable electronic devices; such as mobile - Slew-Rate Controlled Differential Data Driver phones, digital still cameras, and personal digital - Differential Input Receiver with Wide Common- assistants; it allows USB Application Specific ICs Mode Range and High Input Sensitivity (ASICs) and Programmable Logic Devices (PLDs) with Low-Speed Transceiver with Charger Detection - Stable RCV Output during SE0 Condition power supply voltages from 1.65V to 3.6V to interface with the physical layer of the Universal Serial Bus. - Two Single-Ended Receivers with Hysteresis The FUSB1500 can be used as a USB device Supports I/O Voltage: 1.65V to 3.6V . transceiver or a USB host transceiver. It can transmit and receive serial data at both full-speed (12Mbps) and Applications low-speed (1.5Mbps) data rates. The FUSB1500 supports the SE Mode controller . Dual-Camera Applications for Cell Phones interface. Dual-LCD Applications for Cell Phones, Digital Camera Displays, and Viewfinders IMPORTANT NOTE: For additional performance information, please contact [email protected]. Ordering Information Operating Top Packing Part Number Temperature Package Mark Method Range FUSB 16-Pin, Molded Leadless Package (MLP), FUSB1500MHX -40 to +85°C Tape and Reel 1500 JEDEC MO217 Equivalent, 3mm Square © 2008 Fairchild Semiconductor Corporation www.fairchildsemi.com FUSB1500 • Rev. -
Ground-Referenced Signaling for Intra-Chip and Short-Reach Chip-To-Chip Interconnects
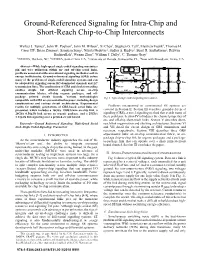
Ground-Referenced Signaling for Intra-Chip and Short-Reach Chip-to-Chip Interconnects Walker J. Turner1, John W. Poulton1, John M. Wilson1, Xi Chen2, Stephen G. Tell1, Matthew Fojtik1, Thomas H. Greer III1, Brian Zimmer2, Sanquan Song2, Nikola Nedovic2, Sudhir S. Kudva2, Sunil R. Sudhakaran2, Rizwan Bashirullah3, Wenxu Zhao4, William J. Dally2, C. Thomas Gray1 1NVIDIA, Durham, NC, 2NVIDIA, Santa Clara, CA, 3University of Florida, Gainesville, FL, 4Now with Broadcom, Irvine, CA Abstract—While high-speed single-ended signaling maximizes VDD pin and wire utilization within on- and off-chip serial links, VREF problems associated with conventional signaling methods result in R R energy inefficiencies. Ground-referenced signaling (GRS) solves DRIVE+ TERM TXDAT LINE many of the problems of single-ended signaling systems and can + RXDAT C CEXT + V be adapted for signaling across RC-dominated channels and LC - INT - DD RDRIVE- + transmission lines. The combination of GRS and clock forwarding VREF - enables simple but efficient signaling across on-chip GND communication fabrics, off-chip organic packages, and off- package printed circuit boards. Various methodologies Fig. 1. Typical single-ended signaling interconnect. compatible with GRS are presented in this paper, including design considerations and various circuit architectures. Experimental results for multiple generations of GRS-based serial links are Problems encountered in conventional SE systems are presented, which includes a 16Gb/s 170fJ/b/mm on-chip link, a covered in Section II. Section III describes ground-referenced 20Gb/s 0.58pJ/b link across an organic package, and a 25Gb/s signaling (GRS), a novel signaling method that avoids many of 1.17pJ/b link signaling over a printed-circuit board.