Complex Numbers and the Complex Exponential
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Math 651 Homework 1 - Algebras and Groups Due 2/22/2013
Math 651 Homework 1 - Algebras and Groups Due 2/22/2013 1) Consider the Lie Group SU(2), the group of 2 × 2 complex matrices A T with A A = I and det(A) = 1. The underlying set is z −w jzj2 + jwj2 = 1 (1) w z with the standard S3 topology. The usual basis for su(2) is 0 i 0 −1 i 0 X = Y = Z = (2) i 0 1 0 0 −i (which are each i times the Pauli matrices: X = iσx, etc.). a) Show this is the algebra of purely imaginary quaternions, under the commutator bracket. b) Extend X to a left-invariant field and Y to a right-invariant field, and show by computation that the Lie bracket between them is zero. c) Extending X, Y , Z to global left-invariant vector fields, give SU(2) the metric g(X; X) = g(Y; Y ) = g(Z; Z) = 1 and all other inner products zero. Show this is a bi-invariant metric. d) Pick > 0 and set g(X; X) = 2, leaving g(Y; Y ) = g(Z; Z) = 1. Show this is left-invariant but not bi-invariant. p 2) The realification of an n × n complex matrix A + −1B is its assignment it to the 2n × 2n matrix A −B (3) BA Any n × n quaternionic matrix can be written A + Bk where A and B are complex matrices. Its complexification is the 2n × 2n complex matrix A −B (4) B A a) Show that the realification of complex matrices and complexifica- tion of quaternionic matrices are algebra homomorphisms. -

Integration in the Complex Plane (Zill & Wright Chapter
Integration in the Complex Plane (Zill & Wright Chapter 18) 1016-420-02: Complex Variables∗ Winter 2012-2013 Contents 1 Contour Integrals 2 1.1 Definition and Properties . 2 1.2 Evaluation . 3 1.2.1 Example: R z¯ dz ............................. 3 C1 1.2.2 Example: R z¯ dz ............................. 4 C2 R 2 1.2.3 Example: C z dz ............................. 4 1.3 The ML Limit . 5 1.4 Circulation and Flux . 5 2 The Cauchy-Goursat Theorem 7 2.1 Integral Around a Closed Loop . 7 2.2 Independence of Path for Analytic Functions . 8 2.3 Deformation of Closed Contours . 9 2.4 The Antiderivative . 10 3 Cauchy's Integral Formulas 12 3.1 Cauchy's Integral Formula . 12 3.1.1 Example #1 . 13 3.1.2 Example #2 . 13 3.2 Cauchy's Integral Formula for Derivatives . 14 3.3 Consequences of Cauchy's Integral Formulas . 16 3.3.1 Cauchy's Inequality . 16 3.3.2 Liouville's Theorem . 16 ∗Copyright 2013, John T. Whelan, and all that 1 Tuesday 18 December 2012 1 Contour Integrals 1.1 Definition and Properties Recall the definition of the definite integral Z xF X f(x) dx = lim f(xk) ∆xk (1.1) ∆xk!0 xI k We'd like to define a similar concept, integrating a function f(z) from some point zI to another point zF . The problem is that, since zI and zF are points in the complex plane, there are different ways to get between them, and adding up the value of the function along one path will not give the same result as doing it along another path, even if they have the same endpoints. -

Trigonometric Functions
Trigonometric Functions This worksheet covers the basic characteristics of the sine, cosine, tangent, cotangent, secant, and cosecant trigonometric functions. Sine Function: f(x) = sin (x) • Graph • Domain: all real numbers • Range: [-1 , 1] • Period = 2π • x intercepts: x = kπ , where k is an integer. • y intercepts: y = 0 • Maximum points: (π/2 + 2kπ, 1), where k is an integer. • Minimum points: (3π/2 + 2kπ, -1), where k is an integer. • Symmetry: since sin (–x) = –sin (x) then sin(x) is an odd function and its graph is symmetric with respect to the origin (0, 0). • Intervals of increase/decrease: over one period and from 0 to 2π, sin (x) is increasing on the intervals (0, π/2) and (3π/2 , 2π), and decreasing on the interval (π/2 , 3π/2). Tutoring and Learning Centre, George Brown College 2014 www.georgebrown.ca/tlc Trigonometric Functions Cosine Function: f(x) = cos (x) • Graph • Domain: all real numbers • Range: [–1 , 1] • Period = 2π • x intercepts: x = π/2 + k π , where k is an integer. • y intercepts: y = 1 • Maximum points: (2 k π , 1) , where k is an integer. • Minimum points: (π + 2 k π , –1) , where k is an integer. • Symmetry: since cos(–x) = cos(x) then cos (x) is an even function and its graph is symmetric with respect to the y axis. • Intervals of increase/decrease: over one period and from 0 to 2π, cos (x) is decreasing on (0 , π) increasing on (π , 2π). Tutoring and Learning Centre, George Brown College 2014 www.georgebrown.ca/tlc Trigonometric Functions Tangent Function : f(x) = tan (x) • Graph • Domain: all real numbers except π/2 + k π, k is an integer. -

Niobrara County School District #1 Curriculum Guide
NIOBRARA COUNTY SCHOOL DISTRICT #1 CURRICULUM GUIDE th SUBJECT: Math Algebra II TIMELINE: 4 quarter Domain: Student Friendly Level of Resource Academic Standard: Learning Objective Thinking Correlation/Exemplar Vocabulary [Assessment] [Mathematical Practices] Domain: Perform operations on matrices and use matrices in applications. Standards: N-VM.6.Use matrices to I can represent and Application Pearson Alg. II Textbook: Matrix represent and manipulated data, e.g., manipulate data to represent --Lesson 12-2 p. 772 (Matrices) to represent payoffs or incidence data. M --Concept Byte 12-2 p. relationships in a network. 780 Data --Lesson 12-5 p. 801 [Assessment]: --Concept Byte 12-2 p. 780 [Mathematical Practices]: Niobrara County School District #1, Fall 2012 Page 1 NIOBRARA COUNTY SCHOOL DISTRICT #1 CURRICULUM GUIDE th SUBJECT: Math Algebra II TIMELINE: 4 quarter Domain: Student Friendly Level of Resource Academic Standard: Learning Objective Thinking Correlation/Exemplar Vocabulary [Assessment] [Mathematical Practices] Domain: Perform operations on matrices and use matrices in applications. Standards: N-VM.7. Multiply matrices I can multiply matrices by Application Pearson Alg. II Textbook: Scalars by scalars to produce new matrices, scalars to produce new --Lesson 12-2 p. 772 e.g., as when all of the payoffs in a matrices. M --Lesson 12-5 p. 801 game are doubled. [Assessment]: [Mathematical Practices]: Domain: Perform operations on matrices and use matrices in applications. Standards:N-VM.8.Add, subtract and I can perform operations on Knowledge Pearson Alg. II Common Matrix multiply matrices of appropriate matrices and reiterate the Core Textbook: Dimensions dimensions. limitations on matrix --Lesson 12-1p. 764 [Assessment]: dimensions. -

1 the Complex Plane
Math 135A, Winter 2012 Complex numbers 1 The complex numbers C are important in just about every branch of mathematics. These notes present some basic facts about them. 1 The Complex Plane A complex number z is given by a pair of real numbers x and y and is written in the form z = x+iy, where i satisfies i2 = −1. The complex numbers may be represented as points in the plane, with the real number 1 represented by the point (1; 0), and the complex number i represented by the point (0; 1). The x-axis is called the \real axis," and the y-axis is called the \imaginary axis." For example, the complex numbers 1, i, 3 + 4i and 3 − 4i are illustrated in Fig 1a. 3 + 4i 6 + 4i 2 + 3i imag i 4 + i 1 real 3 − 4i Fig 1a Fig 1b Complex numbers are added in a natural way: If z1 = x1 + iy1 and z2 = x2 + iy2, then z1 + z2 = (x1 + x2) + i(y1 + y2) (1) It's just vector addition. Fig 1b illustrates the addition (4 + i) + (2 + 3i) = (6 + 4i). Multiplication is given by z1z2 = (x1x2 − y1y2) + i(x1y2 + x2y1) Note that the product behaves exactly like the product of any two algebraic expressions, keeping in mind that i2 = −1. Thus, (2 + i)(−2 + 4i) = 2(−2) + 8i − 2i + 4i2 = −8 + 6i We call x the real part of z and y the imaginary part, and we write x = Re z, y = Im z.(Remember: Im z is a real number.) The term \imaginary" is a historical holdover; it took mathematicians some time to accept the fact that i (for \imaginary," naturally) was a perfectly good mathematical object. -

Complex Eigenvalues
Quantitative Understanding in Biology Module III: Linear Difference Equations Lecture II: Complex Eigenvalues Introduction In the previous section, we considered the generalized two- variable system of linear difference equations, and showed that the eigenvalues of these systems are given by the equation… ± 2 4 = 1,2 2 √ − …where b = (a11 + a22), c=(a22 ∙ a11 – a12 ∙ a21), and ai,j are the elements of the 2 x 2 matrix that define the linear system. Inspecting this relation shows that it is possible for the eigenvalues of such a system to be complex numbers. Because our plants and seeds model was our first look at these systems, it was carefully constructed to avoid this complication [exercise: can you show that http://www.xkcd.org/179 this model cannot produce complex eigenvalues]. However, many systems of biological interest do have complex eigenvalues, so it is important that we understand how to deal with and interpret them. We’ll begin with a review of the basic algebra of complex numbers, and then consider their meaning as eigenvalues of dynamical systems. A Review of Complex Numbers You may recall that complex numbers can be represented with the notation a+bi, where a is the real part of the complex number, and b is the imaginary part. The symbol i denotes 1 (recall i2 = -1, i3 = -i and i4 = +1). Hence, complex numbers can be thought of as points on a complex plane, which has real √− and imaginary axes. In some disciplines, such as electrical engineering, you may see 1 represented by the symbol j. √− This geometric model of a complex number suggests an alternate, but equivalent, representation. -

How to Show That Various Numbers Either Can Or Cannot Be Constructed Using Only a Straightedge and Compass
How to show that various numbers either can or cannot be constructed using only a straightedge and compass Nick Janetos June 3, 2010 1 Introduction It has been found that a circular area is to the square on a line equal to the quadrant of the circumference, as the area of an equilateral rectangle is to the square on one side... -Indiana House Bill No. 246, 1897 Three problems of classical Greek geometry are to do the following using only a compass and a straightedge: 1. To "square the circle": Given a circle, to construct a square of the same area, 2. To "trisect an angle": Given an angle, to construct another angle 1/3 of the original angle, 3. To "double the cube": Given a cube, to construct a cube with twice the area. Unfortunately, it is not possible to complete any of these tasks until additional tools (such as a marked ruler) are provided. In section 2 we will examine the process of constructing numbers using a compass and straightedge. We will then express constructions in algebraic terms. In section 3 we will derive several results about transcendental numbers. There are two goals: One, to show that the numbers e and π are transcendental, and two, to show that the three classical geometry problems are unsolvable. The two goals, of course, will turn out to be related. 2 Constructions in the plane The discussion in this section comes from [8], with some parts expanded and others removed. The classical Greeks were clear on what constitutes a construction. Given some set of points, new points can be defined at the intersection of lines with other lines, or lines with circles, or circles with circles. -
The Integral Resulting in a Logarithm of a Complex Number Dr. E. Jacobs in first Year Calculus You Learned About the Formula: Z B 1 Dx = Ln |B| − Ln |A| a X
The Integral Resulting in a Logarithm of a Complex Number Dr. E. Jacobs In first year calculus you learned about the formula: Z b 1 dx = ln jbj ¡ ln jaj a x It is natural to want to apply this formula to contour integrals. If z1 and z2 are complex numbers and C is a path connecting z1 to z2, we would expect that: Z 1 dz = log z2 ¡ log z1 C z However, you are about to see that there is an interesting complication when we take the formula for the integral resulting in logarithm and try to extend it to the complex case. First of all, recall that if f(z) is an analytic function on a domain D and C is a closed loop in D then : I f(z) dz = 0 This is referred to as the Cauchy-Integral Theorem. So, for example, if C His a circle of radius r around the origin we may conclude immediately that 2 2 C z dz = 0 because z is an analytic function for all values of z. H If f(z) is not analytic then C f(z) dz is not necessarily zero. Let’s do an 1 explicit calculation for f(z) = z . If we are integrating around a circle C centered at the origin, then any point z on this path may be written as: z = reiθ H 1 iθ Let’s use this to integrate C z dz. If z = re then dz = ireiθ dθ H 1 Now, substitute this into the integral C z dz. -
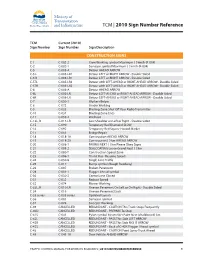
2010 Sign Number Reference for Traffic Control Manual
TCM | 2010 Sign Number Reference TCM Current (2010) Sign Number Sign Number Sign Description CONSTRUCTION SIGNS C-1 C-002-2 Crew Working symbol Maximum ( ) km/h (R-004) C-2 C-002-1 Surveyor symbol Maximum ( ) km/h (R-004) C-5 C-005-A Detour AHEAD ARROW C-5 L C-005-LR1 Detour LEFT or RIGHT ARROW - Double Sided C-5 R C-005-LR1 Detour LEFT or RIGHT ARROW - Double Sided C-5TL C-005-LR2 Detour with LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-5TR C-005-LR2 Detour with LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-6 C-006-A Detour AHEAD ARROW C-6L C-006-LR Detour LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-6R C-006-LR Detour LEFT-AHEAD or RIGHT-AHEAD ARROW - Double Sided C-7 C-050-1 Workers Below C-8 C-072 Grader Working C-9 C-033 Blasting Zone Shut Off Your Radio Transmitter C-10 C-034 Blasting Zone Ends C-11 C-059-2 Washout C-13L, R C-013-LR Low Shoulder on Left or Right - Double Sided C-15 C-090 Temporary Red Diamond SLOW C-16 C-092 Temporary Red Square Hazard Marker C-17 C-051 Bridge Repair C-18 C-018-1A Construction AHEAD ARROW C-19 C-018-2A Construction ( ) km AHEAD ARROW C-20 C-008-1 PAVING NEXT ( ) km Please Obey Signs C-21 C-008-2 SEALCOATING Loose Gravel Next ( ) km C-22 C-080-T Construction Speed Zone C-23 C-086-1 Thank You - Resume Speed C-24 C-030-8 Single Lane Traffic C-25 C-017 Bump symbol (Rough Roadway) C-26 C-007 Broken Pavement C-28 C-001-1 Flagger Ahead symbol C-30 C-030-2 Centre Lane Closed C-31 C-032 Reduce Speed C-32 C-074 Mower Working C-33L, R C-010-LR Uneven Pavement On Left or On Right - Double Sided C-34 -

Introduction Into Quaternions for Spacecraft Attitude Representation
Introduction into quaternions for spacecraft attitude representation Dipl. -Ing. Karsten Groÿekatthöfer, Dr. -Ing. Zizung Yoon Technical University of Berlin Department of Astronautics and Aeronautics Berlin, Germany May 31, 2012 Abstract The purpose of this paper is to provide a straight-forward and practical introduction to quaternion operation and calculation for rigid-body attitude representation. Therefore the basic quaternion denition as well as transformation rules and conversion rules to or from other attitude representation parameters are summarized. The quaternion computation rules are supported by practical examples to make each step comprehensible. 1 Introduction Quaternions are widely used as attitude represenation parameter of rigid bodies such as space- crafts. This is due to the fact that quaternion inherently come along with some advantages such as no singularity and computationally less intense compared to other attitude parameters such as Euler angles or a direction cosine matrix. Mainly, quaternions are used to • Parameterize a spacecraft's attitude with respect to reference coordinate system, • Propagate the attitude from one moment to the next by integrating the spacecraft equa- tions of motion, • Perform a coordinate transformation: e.g. calculate a vector in body xed frame from a (by measurement) known vector in inertial frame. However, dierent references use several notations and rules to represent and handle attitude in terms of quaternions, which might be confusing for newcomers [5], [4]. Therefore this article gives a straight-forward and clearly notated introduction into the subject of quaternions for attitude representation. The attitude of a spacecraft is its rotational orientation in space relative to a dened reference coordinate system. -
Lesson 6: Trigonometric Identities
1. Introduction An identity is an equality relationship between two mathematical expressions. For example, in basic algebra students are expected to master various algbriac factoring identities such as a2 − b2 =(a − b)(a + b)or a3 + b3 =(a + b)(a2 − ab + b2): Identities such as these are used to simplifly algebriac expressions and to solve alge- a3 + b3 briac equations. For example, using the third identity above, the expression a + b simpliflies to a2 − ab + b2: The first identiy verifies that the equation (a2 − b2)=0is true precisely when a = b: The formulas or trigonometric identities introduced in this lesson constitute an integral part of the study and applications of trigonometry. Such identities can be used to simplifly complicated trigonometric expressions. This lesson contains several examples and exercises to demonstrate this type of procedure. Trigonometric identities can also used solve trigonometric equations. Equations of this type are introduced in this lesson and examined in more detail in Lesson 7. For student’s convenience, the identities presented in this lesson are sumarized in Appendix A 2. The Elementary Identities Let (x; y) be the point on the unit circle centered at (0; 0) that determines the angle t rad : Recall that the definitions of the trigonometric functions for this angle are sin t = y tan t = y sec t = 1 x y : cos t = x cot t = x csc t = 1 y x These definitions readily establish the first of the elementary or fundamental identities given in the table below. For obvious reasons these are often referred to as the reciprocal and quotient identities. -

Glossary of Linear Algebra Terms
INNER PRODUCT SPACES AND THE GRAM-SCHMIDT PROCESS A. HAVENS 1. The Dot Product and Orthogonality 1.1. Review of the Dot Product. We first recall the notion of the dot product, which gives us a familiar example of an inner product structure on the real vector spaces Rn. This product is connected to the Euclidean geometry of Rn, via lengths and angles measured in Rn. Later, we will introduce inner product spaces in general, and use their structure to define general notions of length and angle on other vector spaces. Definition 1.1. The dot product of real n-vectors in the Euclidean vector space Rn is the scalar product · : Rn × Rn ! R given by the rule n n ! n X X X (u; v) = uiei; viei 7! uivi : i=1 i=1 i n Here BS := (e1;:::; en) is the standard basis of R . With respect to our conventions on basis and matrix multiplication, we may also express the dot product as the matrix-vector product 2 3 v1 6 7 t î ó 6 . 7 u v = u1 : : : un 6 . 7 : 4 5 vn It is a good exercise to verify the following proposition. Proposition 1.1. Let u; v; w 2 Rn be any real n-vectors, and s; t 2 R be any scalars. The Euclidean dot product (u; v) 7! u · v satisfies the following properties. (i:) The dot product is symmetric: u · v = v · u. (ii:) The dot product is bilinear: • (su) · v = s(u · v) = u · (sv), • (u + v) · w = u · w + v · w.