Hardware Architectures for Point-Based Graphics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Real-Time Graphics Architecture P
4/18/2007 Real-Time Graphics Architecture Lecture 4: Parallelism and Communication Kurt Akeley Pat Hanrahan http://graphics.stanford.edu/cs448-07-spring/ CS448 Lecture 4 Kurt Akeley, Pat Hanrahan, Spring 2007 Topics 1. Frame buffers 2. Types of parallelism 3. Communication patterns and requirements 4. Sorting classification for parallel rendering (with examples) CS448 Lecture 4 Kurt Akeley, Pat Hanrahan, Spring 2007 1 4/18/2007 Frame Buffers Raster vs. calligraphic Raster (image order) dominant choice Calligraphic (object order) Earliest choice (Sketchpad) E&S terminals in the 70s and 80s Works with light pens Scene complexity affects frame rate Monitors are expensive Still required for FAA simulation Increases absolute brightness of light points CS448 Lecture 4 Kurt Akeley, Pat Hanrahan, Spring 2007 2 4/18/2007 Frame buffer definitions What is a frame buffer? What can we learn by considering different definitions? CS448 Lecture 4 Kurt Akeley, Pat Hanrahan, Spring 2007 Frame buffer definition #1 Storage for commands that are executed to refresh the display Allows for raster or calligraphiccalligraphic display (e. g. Megatech) “Frame buffer” for calligraphic display is a “display list” OpenGL “render list”? Key point: frame buffer contents are interpreted Color mapping Image scaling, warping Window system (overlay, separate windows, …) Address Recalculation Pipeline CS448 Lecture 4 Kurt Akeley, Pat Hanrahan, Spring 2007 3 4/18/2007 Frame buffer definition #2 Image memory used to decouple the render frame rate from the display -

20 Years of Opengl
20 Years of OpenGL Kurt Akeley © Copyright Khronos Group, 2010 - Page 1 So many deprecations! • Application-generated object names • Depth texture mode • Color index mode • Texture wrap mode • SL versions 1.10 and 1.20 • Texture borders • Begin / End primitive specification • Automatic mipmap generation • Edge flags • Fixed-function fragment processing • Client vertex arrays • Alpha test • Rectangles • Accumulation buffers • Current raster position • Pixel copying • Two-sided color selection • Auxiliary color buffers • Non-sprite points • Context framebuffer size queries • Wide lines and line stipple • Evaluators • Quad and polygon primitives • Selection and feedback modes • Separate polygon draw mode • Display lists • Polygon stipple • Hints • Pixel transfer modes and operation • Attribute stacks • Pixel drawing • Unified text string • Bitmaps • Token names and queries • Legacy pixel formats © Copyright Khronos Group, 2010 - Page 2 Technology and culture © Copyright Khronos Group, 2010 - Page 3 Technology © Copyright Khronos Group, 2010 - Page 4 OpenGL is an architecture Blaauw/Brooks OpenGL SGI Indy/Indigo/InfiniteReality Different IBM 360 30/40/50/65/75 NVIDIA GeForce, ATI implementations Amdahl Radeon, … Code runs equivalently on Top-level goal Compatibility all implementations Conformance tests, … It’s an architecture, whether Carefully planned, though Intentional design it was planned or not . mistakes were made Can vary amount of No feature subsetting Configuration resource (e.g., memory) Config attributes (e.g., FB) Not a formal -
PACKET 22 BOOKSTORE, TEXTBOOK CHAPTER Reading Graphics
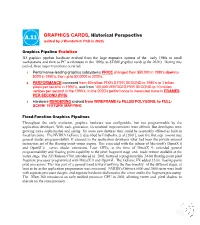
A.11 GRAPHICS CARDS, Historical Perspective (edited by J Wunderlich PhD in 2020) Graphics Pipeline Evolution 3D graphics pipeline hardware evolved from the large expensive systems of the early 1980s to small workstations and then to PC accelerators in the 1990s, to $X,000 graphics cards of the 2020’s During this period, three major transitions occurred: 1. Performance-leading graphics subsystems PRICE changed from $50,000 in 1980’s down to $200 in 1990’s, then up to $X,0000 in 2020’s. 2. PERFORMANCE increased from 50 million PIXELS PER SECOND in 1980’s to 1 billion pixels per second in 1990’’s and from 100,000 VERTICES PER SECOND to 10 million vertices per second in the 1990’s. In the 2020’s performance is measured more in FRAMES PER SECOND (FPS) 3. Hardware RENDERING evolved from WIREFRAME to FILLED POLYGONS, to FULL- SCENE TEXTURE MAPPING Fixed-Function Graphics Pipelines Throughout the early evolution, graphics hardware was configurable, but not programmable by the application developer. With each generation, incremental improvements were offered. But developers were growing more sophisticated and asking for more new features than could be reasonably offered as built-in fixed functions. The NVIDIA GeForce 3, described by Lindholm, et al. [2001], took the first step toward true general shader programmability. It exposed to the application developer what had been the private internal instruction set of the floating-point vertex engine. This coincided with the release of Microsoft’s DirectX 8 and OpenGL’s vertex shader extensions. Later GPUs, at the time of DirectX 9, extended general programmability and floating point capability to the pixel fragment stage, and made texture available at the vertex stage. -

Interactive Visualization of Large-Scale Architectural Models Over the Grid Strolling in Tang Chang’An City
Interactive Visualization of Large-Scale Architectural Models over the Grid Strolling in Tang Chang’an City XU Shuhong1, HENG Chye Kiang2, SUBRAMANIAM Ganesan1, HO Quoc Thuan1, KHOO Boon Tat1 and HUANG Yan2 1 Institute of High Performance Computing, Singapore 2 Department of Architecture, National University of Singapore Keywords: remote visualization, grid-enabled visualization, large-scale architectural models, virtual heritage Abstract: Virtual reconstruction of the ancient Chinese Chang’an city has been continued for ten years at the National University of Singapore. Motivated by sharing this grand city with people who are geographically distant and equipped with normal personal computers, this paper presents a practical Grid-enabled visualization infrastructure that is suitable for interactive visualization of large-scale architectural models. The underlying Grid services, such as information service, visualization planner and execution container etc, are developed according to the OGSA standard. To tackle the critical problem of Grid visualization, i.e. data size and network bandwidth, a multi-stage data compression approach is deployed and the corresponding data pre-processing, rendering and remote display issues are systematically addressed. 1 INTRODUCTION Chang’an, meaning long-lasting peace, was the capital of China’s Tang dynasty from 618 to 907 AD. At its peak, it had a population of about one million. Measuring 9.7 by 8.6 kilometres, the city’s architecture inspired the planning of many capital cities in East Asia such as Heijo-kyo and Heian-kyo in Japan in the 8th century, and imperial Chinese cities like Beijing of the Ming and Qing dynasties. To bring this architectural miracle back to life, a team led by Professor Heng Chye Kiang at the National University of Singapore (NUS) has conducted extensive research since the middle of 90s. -

Master-Seminar: Hochleistungsrechner - Aktuelle Trends Und Entwicklungen Aktuelle GPU-Generationen (Nvidia Volta, AMD Vega)
Master-Seminar: Hochleistungsrechner - Aktuelle Trends und Entwicklungen Aktuelle GPU-Generationen (NVidia Volta, AMD Vega) Stephan Breimair Technische Universitat¨ Munchen¨ 23.01.2017 Abstract 1 Einleitung GPGPU - General Purpose Computation on Graphics Grafikbeschleuniger existieren bereits seit Mitte der Processing Unit, ist eine Entwicklung von Graphical 1980er Jahre, wobei der Begriff GPU“, im Sinne der ” Processing Units (GPUs) und stellt den aktuellen Trend hier beschriebenen Graphical Processing Unit (GPU) bei NVidia und AMD GPUs dar. [1], 1999 von NVidia mit deren Geforce-256-Serie ein- Deshalb wird in dieser Arbeit gezeigt, dass sich GPUs gefuhrt¨ wurde. im Laufe der Zeit sehr stark differenziert haben. Im strengen Sinne sind damit Prozessoren gemeint, die Wahrend¨ auf technischer Seite die Anzahl der Transis- die Berechnung von Grafiken ubernehmen¨ und diese in toren stark zugenommen hat, werden auf der Software- der Regel an ein optisches Ausgabegerat¨ ubergeben.¨ Der Seite mit neueren GPU-Generationen immer neuere und Aufgabenbereich hat sich seit der Einfuhrung¨ von GPUs umfangreichere Programmierschnittstellen unterstutzt.¨ aber deutlich erweitert, denn spatestens¨ seit 2008 mit dem Erscheinen von NVidias GeForce 8“-Serie ist die Damit wandelten sich einfache Grafikbeschleuniger zu ” multifunktionalen GPGPUs. Die neuen Architekturen Programmierung solcher GPUs bei NVidia uber¨ CUDA NVidia Volta und AMD Vega folgen diesem Trend (Compute Unified Device Architecture) moglich.¨ und nutzen beide aktuelle Technologien, wie schnel- Da die Bedeutung von GPUs in den verschiedensten len Speicher, und bieten dadurch beide erhohte¨ An- Anwendungsgebieten, wie zum Beispiel im Automobil- wendungsleistung. Bei der Programmierung fur¨ heu- sektor, zunehmend an Bedeutung gewinnen, untersucht tige GPUs wird in solche fur¨ herkommliche¨ Grafi- diese Arbeit aktuelle GPU-Generationen, gibt aber auch kanwendungen und allgemeine Anwendungen differen- einen Ruckblick,¨ der diese aktuelle Generation mit vor- ziert. -

Onyx2™ Deskside Workstation Owner's Guide
Onyx2™ Deskside Workstation Owner’s Guide Document Number 007-3454-004 CONTRIBUTORS Written by Mark Schwenden and Carolyn Curtis Illustrated by Dan Young and Cheri Brown Production by Allen Clardy Engineering contributions by Bob Marinelli, Brad Morrow, Bharat Patel, Ed Reidenbach, Philip Montalban, Mike Mackovitch, Jim Ammon, Bob Murphy, Reuel Nash, Mohsen Hosseini, Suzanne Jones, Jeff Milo, Patrick Conway, Kirk Law, Dave Lima, and Martin Frankel St Peter’s Basilica image courtesy of ENEL SpA and InfoByte SpA. Disk Thrower image courtesy of Xavier Berenguer, Animatica. © 1998, Silicon Graphics, Inc.— All Rights Reserved The contents of this document may not be copied or duplicated in any form, in whole or in part, without the prior written permission of Silicon Graphics, Inc. RESTRICTED RIGHTS LEGEND Use, duplication, or disclosure of the technical data contained in this document by the Government is subject to restrictions as set forth in subdivision (c) (1) (ii) of the Rights in Technical Data and Computer Software clause at DFARS 52.227-7013 and/or in similar or successor clauses in the FAR, or in the DOD or NASA FAR Supplement. Unpublished rights reserved under the Copyright Laws of the United States. Contractor/manufacturer is Silicon Graphics, Inc., 2011 N. Shoreline Blvd., Mountain View, CA 94043-1389. FCC Warning This equipment has been tested and found compliant with the limits for a Class A digital device, pursuant to Part 15 of the FCC rules. These limits are designed to provide reasonable protection against harmful interference when the equipment is operated in a commercial environment. This equipment generates, uses, and can radiate radio frequency energy and if not installed and used in accordance with the instruction manual, may cause harmful interference to radio communications. -

Infinitereality: Ein Real-Time- Grafiksystem
InfiniteReality: Ein Real-Time- Grafiksystem Vortrag am GDV-Seminar ETH Zürich Andreas Deller 18. Mai 1998 05/19/98 InfiniteReality Seite 1 Outline I. Einführung A. Grundinformationen über InfiniteReality B. Eckdaten der InfiniteReality C. Zum Vortrag II. Architektur A. Übersicht B. Detailbeschreibungen 1. Geometry Board a. Host Interface b. Geometry Distributor c. Geometry Engines (2 oder 4 pro Pipeline) d. Geometry Raster FIFO 2. Raster Memory Board (1, 2, oder 4 pro Pipeline) a. Fragment Generators b. Image Engines 3. Display Generator Board III. Features 1. Virtual Texture 2. Scene Load Management IV. Host-Systeme A. Systembeschreibung 1. Node Cards 2. Beispielkonfigurationen V. Performance VI. Endnoten/Literaturangaben VII. Index 05/19/98 InfiniteReality Seite 2 Einführung Grundinformationen über InfiniteReality Das InfiniteReality(IR)-Grafiksystem von SGI (Silicon Graphics, Inc.) ist das erste Workstation-System, das für gleichmässige, garantierte Hertz-Raten entwickelt worden ist. Als Nachfolger der RealityEngine wird es in den Hochleistungs-Grafikcomputern Onyx und Onyx2 von SGI eingesetzt. Das Design musste derart angepasst werden, dass die IR-Engine sowohl von den Vorzügen der verbesserten Systemarchitektur der Onyx2 profitieren als auch in der Onyx optimal eingesetzt werden kann. Zudem sollte sie skalierbar sein, um den verschiedenen Kundenwünschen möglichst gut zu entsprechen und einen benötigten Ausbau ohne grossen Aufwand zu erledigen. Das IR-Grafiksystem wird als «third-generation graphics system» bezeichnet. Dies bedeuetet, dass das System beleuchtete, schattierte, tiefengepufferte, texturierte, antialiased Dreiecke hardwareunterstützt rendern kann, und zwar mit möglichst wenig Performance-Einbusse. Weiter sollten Texturen eine praktisch unbegrenzte Grösse haben dürfen, ohne die Performance erheblich zu beeinflussen. Der Programmierer sollte mit dem Handling der Textur so wenig Zeit wie möglich aufbringen müssen. -
GPU Architecture:Architecture: Implicationsimplications && Trendstrends
GPUGPU Architecture:Architecture: ImplicationsImplications && TrendsTrends DavidDavid Luebke,Luebke, NVIDIANVIDIA ResearchResearch Beyond Programmable Shading: In Action GraphicsGraphics inin aa NutshellNutshell • Make great images – intricate shapes – complex optical effects – seamless motion • Make them fast – invent clever techniques – use every trick imaginable – build monster hardware Eugene d’Eon, David Luebke, Eric Enderton In Proc. EGSR 2007 and GPU Gems 3 …… oror wewe couldcould justjust dodo itit byby handhand Perspective study of a chalice Paolo Uccello, circa 1450 Beyond Programmable Shading: In Action GPU Evolution - Hardware 1995 1999 2002 2003 2004 2005 2006-2007 NV1 GeForce 256 GeForce4 GeForce FX GeForce 6 GeForce 7 GeForce 8 1 Million 22 Million 63 Million 130 Million 222 Million 302 Million 754 Million Transistors Transistors Transistors Transistors Transistors Transistors Transistors 20082008 GeForceGeForce GTX GTX 200200 1.41.4 BillionBillion TransistorsTransistors Beyond Programmable Shading: In Action GPUGPU EvolutionEvolution -- ProgrammabilityProgrammability ? Future: CUDA, DX11 Compute, OpenCL CUDA (PhysX, RT, AFSM...) 2008 - Backbreaker DX10 Geo Shaders 2007 - Crysis DX9 Prog Shaders 2004 – Far Cry DX7 HW T&L DX8 Pixel Shaders 1999 – Test Drive 6 2001 – Ballistics TheThe GraphicsGraphics PipelinePipeline Vertex Transform & Lighting Triangle Setup & Rasterization Texturing & Pixel Shading Depth Test & Blending Framebuffer Beyond Programmable Shading: In Action TheThe GraphicsGraphics PipelinePipeline Vertex Transform -

Infinitereality: a Real-Time Graphics System
InfiniteReality: A Real-Time Graphics System John S. Montrym, Daniel R. Baum, David L. Dignam, and Christopher J. Migdal Silicon Graphics Computer Systems ABSTRACT Most of the features and capabilities of the InfiniteReality architec- TM The InfiniteReality graphics system is the first general-purpose ture are designed to support this real-time performance goal. Mini- workstation system specifically designed to deliver 60Hz steady mizing the time required to change graphics modes and state is as frame rate high-quality rendering of complex scenes. This paper important as increasing raw transformation and pixel fill rate. Many describes the InfiniteReality system architecture and presents novel of the targeted applications require access to very large textures features designed to handle extremely large texture databases, and/or a great number of distinct textures. Permanently storing such maintain control over frame rendering time, and allow user custom- large amounts of texture data within the graphics system itself is not ization for diverse video output requirements. Rendering perfor- economically viable. Thus methods must be developed for applica- mance expressed using traditional workstation metrics exceeds tions to access a “virtual texture memory” without significantly seven million lighted, textured, antialiased triangles per second, and impacting overall performance. Finally, the system must provide 710 million textured antialiased pixels filled per second. capabilities for the application to monitor actual geometry and fill rate performance on a frame by frame basis and make adjustments CR Categories and Subject Descriptors: I.3.1 [Computer if necessary to maintain a constant 60Hz frame update rate. Graphics]: Hardware Architecture; I.3.3 [Computer Graph- ics]: Picture/Image Generation Aside from the primary goal of real-time application performance, two other areas significantly shaped the system architecture. -

Infinitereality™ Video Format Combiner User's Guide
InfiniteReality™ Video Format Combiner User’s Guide Document Number 007-3279-001 CONTRIBUTORS Written by Carolyn Curtis Illustrated by Carolyn Curtis Production by Laura Cooper Engineering contributions by Gregory Eitzmann, David Naegle, Chase Garfinkle, Ashok Yerneni, Rob Wheeler, Ben Garlick, Mark Schwenden, and Ed Hutchins Cover design and illustration by Rob Aguilar, Rikk Carey, Dean Hodgkinson, Erik Lindholm, and Kay Maitz © 1996, Silicon Graphics, Inc.— All Rights Reserved The contents of this document may not be copied or duplicated in any form, in whole or in part, without the prior written permission of Silicon Graphics, Inc. RESTRICTED RIGHTS LEGEND Use, duplication, or disclosure of the technical data contained in this document by the Government is subject to restrictions as set forth in subdivision (c) (1) (ii) of the Rights in Technical Data and Computer Software clause at DFARS 52.227-7013 and/or in similar or successor clauses in the FAR, or in the DOD or NASA FAR Supplement. Unpublished rights reserved under the Copyright Laws of the United States. Contractor/manufacturer is Silicon Graphics, Inc., 2011 N. Shoreline Blvd., Mountain View, CA 94043-1389. Silicon Graphics, the Silicon Graphics logo, Onyx, and IRIS are registered trademarks and IRIX, Sirius Video, POWER Onyx, and InfiniteReality are trademarks of Silicon Graphics, Inc. X Window System is a trademark of Massachusetts Institute of Technology. InfiniteReality™ Video Format Combiner User’s Guide Document Number 007-3279-001 Contents List of Figures vii List of Tables ix About This Guide xi Audience xi Structure of This Guide xi Conventions xii 1. InfiniteReality Graphics and the Video Format Combiner Utility 1 Channel Input and Output 2 Video Format Combinations 2 Video Format Combiner Utility and the Sirius Video Option 2 Programmable Querying of Video Format Combinations 3 2. -
SGI High Performance Visualization Solutions
Next Generation Graphics Hardware Architectures Fabrizio Magugliani SE Director, EMEA [email protected] 1 SGI Confidential-Not for Redistribution Agenda • The ultimate architecture •Driving the technology •SGI® Onyx® 3000 series –InfiniteReality3™ –InfinitePerformance™ •SGI® Onyx® 300 •Silicon Graphics Fuel™ visual workstation •Conclusion •Q&A SGI Confidential-Not for Redistribution The Ultimate Architecture Because some people think that “There is no tool like an old tool” SGI Confidential-Not for Redistribution Driving the Technology Real-time visualization Large DBs Desktop Throughput and Visualization High Turnaround Throughput SGI® Reality Center™ Silicon Graphics Fuel™ Silicon Graphics® SGI® Origin® 3000 series SGI® Origin® 3800 SGI® Origin® 300 SGI™ Onyx® 3000 series Octane2® SGI® Onyx® 3800 SGI® Onyx® 300 (IRIX) (IRIX®) (IRIX) (IRIX) Distributed memory Shared memory SGI Confidential-Not for Redistribution SGI™ Onyx® 3000 Series • SGI Onyx 3000 series with InfiniteReality® graphics IntroducedIntroduced JulyJuly 2000 2000 • The industry’s highest quality graphics • Revolutionary NUMAflex™ modular computing design with integrated graphics SGI Confidential-Not for Redistribution InfiniteReality™ Performance, Flexibility, and Quality SGI Confidential-Not for Redistribution InfiniteReality™ Versatile Frame Buffer Displays Frame Buffer SGI Confidential-Not for Redistribution InfiniteReality™ Versatile Frame Buffer SGI Confidential-Not for Redistribution InfiniteReality™ Reality Center™ Multichannels are easy! Even in Edge-Blended -

Download Amd Radeon Hd 8350 Driver Download Amd Radeon Hd 8350 Driver
download amd radeon hd 8350 driver Download amd radeon hd 8350 driver. You can get the basic Radeon HD 8350 drivers through %%os%%, or by conducting a Windows® update. While these Graphics Card drivers are basic, they support the primary hardware functions. Here is a full guide on manually updating these AMD device drivers. Optional Offer for DriverDoc by Solvusoft | EULA | Privacy Policy | Terms | Uninstall. Update Radeon HD 8350 Drivers Automatically: Recommendation: If you are a novice computer user with no experience updating drivers, we recommend using DriverDoc [Download DriverDoc - Product by Solvusoft] to help you update your AMD Graphics Card driver. DriverDoc takes away the hassle and headaches of making sure you are downloading and installing the correct HD 8350's drivers for your operating system. In addition, DriverDoc not only ensures your Graphics Card drivers stay updated, but with a database of over 2,150,000 drivers (database updated daily), it keeps all of your other PC's drivers updated as well. Optional Offer for DriverDoc by Solvusoft | EULA | Privacy Policy | Terms | Uninstall. HD 8350 Update FAQ. Can You Describe the Benefits of HD 8350 Driver Updates? Updated drivers can unlock Graphics Card features, increase PC performance, and maximize your hardware's potential. Risks of installing the wrong HD 8350 drivers can lead to system crashes, decreased performance, and overall instability. When Do I Update HD 8350 Drivers? For optimal HD 8350 hardware performance, you should update your device drivers once every few months. How Do I Download HD 8350 Drivers? Manual updates for advanced PC users can be carried out with Device Manager, while novice computer users can update Radeon HD 8350 drivers automatically with a driver update utility.