An Investigation of Series Hybrid-Electric Vehicle Operation Christopher John Merriman Iowa State University
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Cyclone 3.5 L Ecoboost, 3.5 Duratech and 3.7 L Ti-VCT V6 Engine
Cyclone 3.5L EcoBoost, 3.5 Duratech and 3.7L Ti-VCT V6 Engine Tech All 3 variants use the same forged crankshaft with 3.413” stroke. The difference is the bore, 3.64” for the 3.5/EcoBoost and 3.76” for the 3.7L version. The blocks are cast aluminum with floating cylinder walls and cast iron liners. They ap- pear to use the same block but we have not confirmed this yet. We’re interested to learn if the blocks use the same bell- housing pattern or are interchangeable between FWD, AWD and RWD applications. That was not the case with the 3.8 which used different FWD and RWD versions with the main difference being the bellhousing bolt patterns. Seems that just about all of the parts now use a QR symbol. All use the same powder metal connecting rod which includes a bushing on the pin end for a floating pin. The rod is shot peened for improved fatigue strength, has a decent cross-section and uses cap screws instead of through bolts. The rod shown on the left is a 96-04 3.8/4.2 powder metal rod, the Cyclone rod in the center and one of our favorite 351W forged I-beam rods on the right. Notice how the cross section of the Cyclone rod appears to be more like the 351W I-beam than the 3.8/4.2 rod which was much to weak for high perfor- mance applications. Only time, boost and nitrous will determine the durability and strength of the Cyclone rod, but since the EcoBoost engine has already been proven to provide exceptional durability in the 365-400 HP range with Ford’s factory tuning expertise, we can expect adequate durability at power levels around 500 HP or so with upper rev limits at 6500-7000 or so as long as the tuning is on the money without detonation. -
Cylinder Deactivation: a Technology with a Future Or a Niche Application?: Schaeffler Symposium
172 173 Cylinder Deactivation A technology with a future or a niche application? N O D H I O E A S M I O U E N L O A N G A D F J G I O J E R U I N K O P J E W L S P N Z A D F T O I E O H O I O O A N G A D F J G I O J E R U I N K O P O A N G A D F J G I O J E R O I E U G I A F E D O N G I U A M U H I O G D N O I E R N G M D S A U K Z Q I N K J S L O G D W O I A D U I G I R Z H I O G D N O I E R N G M D S A U K N M H I O G D N O I E R N G E Q R I U Z T R E W Q L K J P B E Q R I U Z T R E W Q L K J K R E W S P L O C Y Q D M F E F B S A T B G P D R D D L R A E F B A F V N K F N K R E W S P D L R N E F B A F V N K F N T R E C L P Q A C E Z R W D E S T R E C L P Q A C E Z R W D K R E W S P L O C Y Q D M F E F B S A T B G P D B D D L R B E Z B A F V R K F N K R E W S P Z L R B E O B A F V N K F N J H L M O K N I J U H B Z G D P J H L M O K N I J U H B Z G B N D S A U K Z Q I N K J S L W O I E P ArndtN N BIhlemannA U A H I O G D N P I E R N G M D S A U K Z Q H I O G D N W I E R N G M D A M O E P B D B H M G R X B D V B D L D B E O I P R N G M D S A U K Z Q I N K J S L W O Q T V I E P NorbertN Z R NitzA U A H I R G D N O I Q R N G M D S A U K Z Q H I O G D N O I Y R N G M D E K J I R U A N D O C G I U A E M S Q F G D L N C A W Z Y K F E Q L O P N G S A Y B G D S W L Z U K O G I K C K P M N E S W L N C U W Z Y K F E Q L O P P M N E S W L N C T W Z Y K M O T M E U A N D U Y G E U V Z N H I O Z D R V L G R A K G E C L Z E M S A C I T P M O S G R U C Z G Z M O Q O D N V U S G R V L G R M K G E C L Z E M D N V U S G R V L G R X K G T N U G I C K O -

And Heavy-Duty Truck Fuel Efficiency Technology Study – Report #2
DOT HS 812 194 February 2016 Commercial Medium- and Heavy-Duty Truck Fuel Efficiency Technology Study – Report #2 This publication is distributed by the U.S. Department of Transportation, National Highway Traffic Safety Administration, in the interest of information exchange. The opinions, findings and conclusions expressed in this publication are those of the author and not necessarily those of the Department of Transportation or the National Highway Traffic Safety Administration. The United States Government assumes no liability for its content or use thereof. If trade or manufacturers’ names or products are mentioned, it is because they are considered essential to the object of the publication and should not be construed as an endorsement. The United States Government does not endorse products or manufacturers. Suggested APA Format Citation: Reinhart, T. E. (2016, February). Commercial medium- and heavy-duty truck fuel efficiency technology study – Report #2. (Report No. DOT HS 812 194). Washington, DC: National Highway Traffic Safety Administration. TECHNICAL REPORT DOCUMENTATION PAGE 1. Report No. 2. Government Accession No. 3. Recipient's Catalog No. DOT HS 812 194 4. Title and Subtitle 5. Report Date Commercial Medium- and Heavy-Duty Truck Fuel Efficiency February 2016 Technology Study – Report #2 6. Performing Organization Code 7. Author(s) 8. Performing Organization Report No. Thomas E. Reinhart, Institute Engineer SwRI Project No. 03.17869 9. Performing Organization Name and Address 10. Work Unit No. (TRAIS) Southwest Research Institute 6220 Culebra Rd. 11. Contract or Grant No. San Antonio, TX 78238 GS-23F-0006M/DTNH22- 12-F-00428 12. Sponsoring Agency Name and Address 13. -
Progress Report on Clean and Efficient Automotive Technologies Under Development at EPA
Office of Transportation EPA420-R-04-002 and Air Quality January 2004 Progress Report on Clean and Efficient Automotive Technologies Under Development at EPA Interim Technical Report Printed on Recycled Paper (This page is intentionally blank.) EPA420-R-04-002 January 2004 Progress Report on Clean and Efficient Automotive Technologies Under Development at EPA Interim Technical Report Advanced Technology Division Office of Transportation and Air Quality U.S. Environmental Protection Agency NOTICE This Technical Report does not necessarily represent final EPA decisions or positions. It is intended to present technical analysis of issues using data that are currently available. The purpose in the release of such reports is to facilitate an exchange of technical information and to inform the public of these technical developments. Authors and Contributors The following EPA employees were major contributors to the development of this technical report: Jeff Alson Dan Barba Jim Bryson Mark Doorlag David Haugen John Kargul Joe McDonald Kevin Newman Lois Platte Mark Wolcott Report Availability An electronic copy of this technical report is available for downloading from EPA’s website: http://www.epa.gov/otaq/technology.htm Jan 2004 Progress Report on Clean and Efficient Automotive Technologies page 4 Table of Contents Abstract........................................................................................................................................... 6 Executive Summary ...................................................................................................................... -

2348 7208 Design, Analysis & Optimi
International Journal of Advanced Engineering &Innovative Technology (IJAEIT) ISSN: 2348 7208 IMPACT FACTOR: 1.04 Design, Analysis & Optimization of V6 Engine Crankshaft Assembly Sagar Dhotare1, Aniket S Jangam2, Pranil D Kamble2, Sumanth S Hegde2, Shreekumar R Dhayal, Saurabh V Dhure2 ABSTRACT: In automobile industry most, important unit is internal combustion engine. The connecting rod and crank shaft are the main component. A connecting rod is a shaft which connects a piston to crank is a mechanical part able to perform a conversion between reciprocating motion and rotational motion. Crankshaft is to translate the linear reciprocating motion of a pistons into the rotational motion required by the automobile. optimization analysis of connecting rod and crankshaft is to study was to evaluate and compare the fatigue performance for automotive connecting rod and crankshafts. The present aim of the project is to study the effect of different material used for the piston, connecting rod and crankshaft assembly for an v6 petrol engine. In the initial design of v6 engine the working cycle of the crankshaft is 36,30,000 cycles and the heat flux of piston is 2.99 W/mm which is optimized by using different parameters like material, size and shape of the major parts using the analytical calculations. The validation of designed are done by FEA. These parts are modelled and assembled SOLIDWORKS software. The main objective of the project is to increase the working cycle of the crankshaft, reduce the heat flux on the piston and reduce the weight of the entire assembly. The paper comes up with the overall design of the crankshaft connecting rod mechanism and piston performed by considering various structural force analysis. -

Modeling, Simulation and Experimental Verification of a Hydraulic Fan Drive System
MODELING, SIMULATION AND EXPERIMENTAL VERIFICATION OF A HYDRAULIC FAN DRIVE SYSTEM A THESIS SUBMITTED TO THE GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCES OF MIDDLE EAST TECHNICAL UNIVERSITY BY ERSEN TORAMAN IN PARTIAL FULLFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF SCIENCE IN MECHANICAL ENGINEERING SEPTEMBER 2013 Approval of the thesis: MODELING, SIMULATION AND EXPERIMENTAL VERIFICATION OF HYDRAULIC FAN DRIVE SYSTEM submitted by ERSEN TORAMAN in partial fulfillment of the requirements for the degree of Master of Science in Mechanical Engineering Department, Middle East Technical University by, Prof. Dr. Canan Özgen Dean, Graduate School of Natural and Applied Sciences ________________ Prof. Dr. Süha Oral Head of Department, Mechanical Engineering ________________ Prof. Dr. Tuna Balkan Supervisor, Mechanical Engineering Dept., METU ________________ Examining Committee Members: Prof. Dr. Y. Samim Ünlüsoy Mechanical Engineering Dept., METU ________________ Prof. Dr. Tuna Balkan Mechanical Engineering Dept., METU ________________ Assist. Prof. Dr. Yiğit Yazıcıoğlu Mechanical Engineering Dept., METU ________________ Assist. Prof. Dr. Kıvanç Azgın Mechanical Engineering Dept., METU ________________ Serhat Başaran, M.Sc. R&D, FNSS Defense Systems Co. ________________ Date: 10/09/2013 I hereby declare that all information in this document has been obtained and presented in accordance with academic rules and ethical conduct. I also declare that, as required by these rules and conduct, I have fully cited and referenced all material and results that are not original to this work. Name, Last name: Ersen Toraman Signature: iv ABSTRACT MODELING, SIMULATION AND EXPERIMENTAL VERIFICATION OF A HYDRAULIC FAN DRIVE SYSTEM Toraman, Ersen M. Sc., Department of Mechanical Engineering Supervisor: Prof. Dr. Tuna Balkan September 2013, 83 pages Environmental factors, global legislations and economic reasons force vehicle industry to produce more efficient systems. -

Model-Based Control Development for an Advanced Thermal Management System for Automotive Powertrains
Model-Based Control Development for an Advanced Thermal Management System for Automotive Powertrains A Thesis Presented in Partial Fulfillment of the Requirements for the Degree Master of Science in the Graduate School of The Ohio State University By Kyle Ian Merical, Graduate Program in Mechanical Engineering The Ohio State University 2013 Master's Examination Committee: Professor Marcello Canova, Advisor Professor Giorgio Rizzoni, Committee Member Professor Shawn Midlam-Mohler, Committee Member c Copyright by Kyle Ian Merical 2013 Abstract Rising fuel prices and tightening vehicle emission regulations have led to a large demand for fuel efficient passenger vehicles. Among several design improvements and technical solutions, advanced Thermal Management Systems (TMS) have been recently developed to more efficiently manage the thermal loads produced by internal combustion engines and thereby reduce fuel consumption. Advanced TMS include complex networks of coolant, oil and transmission fluid lines, heat exchangers, recuperators, variable speed pumps and fans, as well as active fluid flow control devices that allows for a greatly improved freedom to manage the heat rejection and thermal management of the engine and transmission components. This control authority can be exploited, for instance, to rapidly warm the powertrain fluids during vehicle cold-starts, and then maintain them at elevated temperatures. Increasing the temperatures of the engine oil and transmission fluid decreases their viscosity, ultimately leading to a reduction of the engine and transmission frictional losses, and improved fuel economy. On the other hand, robust and accurate TMS controllers must be developed in order to take full advantage of the additional degrees of freedom provided by the available actuators and system hardware configuration. -
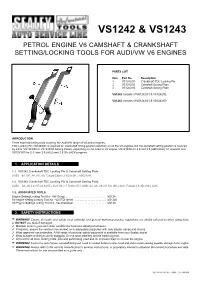
Vs1242 & Vs1243
VS1242 & VS1243 PETROL ENGINE V6 CAMSHAFT & CRANKSHAFT SETTING/LOCKING TOOLS FOR AUDI/VW V6 ENGINES PARTS LIST Item Part No. Description 1 VS1242/01 Crankshaft TDC Locking Pin 2 VS1242/02 Camshaft Setting Plate 3 VS1243/03 Camshaft Setting Plate VS1242 consists of VS1242/01 & VS1242/02 VS1243 consists of VS1242/01 & VS1243/03 INTRODUCTION Three essential timing tools covering the Audi/VW range of V6 petrol engines. TDC Locking Pin VS1242/01 is required for crankshaft timing position retention on all the V6 engines, but the camshaft setting position is covered by either VS1242/02 or VS1243/03 Setting Plates, depending on the specific V6 engine. VS1242/02 for 2.6 and 2.8 (ABC/AAH) 91 onwards and VS1243/03 for 2.4, later 2.8 (ALG) and 2.8 30v (ACK) engines. 1. APPLICATION DETAILS 1.1. VS1242 Crankshaft TDC Locking Pin & Camshaft Setting Plate AUDI: 80,100, A4, A6, A8, Coupe/Cabrio 2.6/2.8 (91-) ABC/AAH. 1.2. VS1243 Crankshaft TDC Locking Pin & Camshaft Setting Plate. AUDI: A4, A6 2.4 (97-)/2.8 (97-) ALG S4 2.7 Turbo (97-) AGB, A4, A6, A8 2.8 30v (95-) ACK, Passat 2.8 30v (96-) ACK. 1.3. ASSOCIATED TOOLS Engine Setting/Locking Tool Kit - VW Group . .VS124 V6 engine setting/Locking Tool Kit - V2.5TDi diesel . .VS1240 V6 Engine Setting/Locking Tool Kit - Vauxhall/Opel . .VS130 2. SAFETY INSTRUCTIONS p WARNING! Ensure all health and safety, local authority, and general workshop practice regulations are strictly adhered to when using tools. 7 DO NOT use tools if damaged. -

GM V6 and VS Engines
Chapter Seven GM V6 and VS Engines A wide range of GM powerplants has been Specifications (Tables 1-4) and tightening offered for MerCruiser installations. Engines torques (Table 5) are at the end of the chapter. include the 229 cid V6, the small block VS in displacements up to 350 cid, and the large block V8 ENGINE SERIAL NUMBER (or Mark IV) up to 482 cid. The Chevrolet-built V6 and V8 engines are very The engine serial number is stamped on a Flate similar in design and construction; there is little mounted at the rear of the engine on the flywheel difference in the repair and service procedures for housing (Figure 1). these engines. The procedures given in this chapter This information identifies the engine and are typical and apply to all engines, except where indicates if there are unique parts or if internal specifically noted. changes have been made during the model run. It is The V6 engine cylinders are numbered from important when ordering replacement parts for the front to rear: l-3-5 on the port bank and 2-4-6 on engine. the starboard bank. The cylinder firing order is l-6-5-4-3-2. The V8 engine cylinders are numbered SPECIAL TOOLS from front to rear: l-3-5-7 on the port bank and Where special tools are required or 2-4-6-8 on the starboard bank. The cylinder firing recommended for engine overhaul, the tool order is l-8-4-3-6-5-7-2. numbers are provided. Mercury Marine tool part Hydraulic valve lifters and pushrods operate the numbers have a “C” prefix. -

New Hybrid Systems of Heat Recovery: Thermal Modeling and Optimization
New hybrid systems of heat recovery : thermal modeling and optimization Hassan Jaber To cite this version: Hassan Jaber. New hybrid systems of heat recovery : thermal modeling and optimization. Electric power. Université d’Angers, 2019. English. NNT : 2019ANGE0079. tel-03249321 HAL Id: tel-03249321 https://tel.archives-ouvertes.fr/tel-03249321 Submitted on 4 Jun 2021 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. THESE DE DOCTORAT DE L'UNIVERSITE D'ANGERS COMUE UNIVERSITE BRETAGNE LOIRE COLE OCTORALE N E D ° 602 Sciences pour l'Ingénieur Spécialité : Energétique-Thermique-Combustion Par M. Hassan JABER Nouveaux systèmes hybrides de récupération de chaleur : modélisation thermique et optimisation New hybrid systems of heat recovery: thermal modeling and optimization Thèse présentée et soutenue à Angers, le 9 Juillet 2019 Unité de recherche : LARIS EA 7315 Thèse N° : JURY Président : M. Laurent AUTRIQUE Professeur, Polytech Angers Rapporteurs : M. Daniel BOUGEARD Professeur, IMT Lille Douai M. Stéphane FOHANNO Professeur, Université de Reims Directeur de thèse : M. Thierry LEMENAND Maître de conférences HDR, Polytech Angers Co-directeur de thèse : M. Mahmoud KHALED Maître de conférences HDR, LIU University (Liban) M. Mohamad RAMADAN Maître de conférences, LIU University (Liban) Table des matières Introduction .................................................................................................................................. -

Study on Valve Strategy of Variable Cylinder Deactivation Based on Electromagnetic Intake Valve Train
applied sciences Article Study on Valve Strategy of Variable Cylinder Deactivation Based on Electromagnetic Intake Valve Train Maoyang Hu, Siqin Chang *, Yaxuan Xu and Liang Liu School of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing 210094, China; [email protected] (M.H.); [email protected] (Y.X.); [email protected] (L.L.) * Correspondence: [email protected]; Tel.: +86-025-84315451 Received: 1 September 2018; Accepted: 28 October 2018; Published: 31 October 2018 Abstract: The camless electromagnetic valve train (EMVT), as a fully flexible variable valve train, has enormous potential for improving engine performances. In this paper, a new valve strategy based on the electromagnetic intake valve train (EMIV) is proposed to achieve variable cylinder deactivation (VCD) on a four-cylinder gasoline engine. The 1D engine model was constructed in GT-Power according to test data. In order to analyze the VCD operation with the proposed valve strategy, the 1D model was validated using a 3D code. The effects of the proposed valve strategy were investigated from the perspective of energy loss of the transition period, the mass fraction of oxygen in the exhaust pipe, and the minimum in-cylinder pressure of the active cycle. On the premise of avoiding high exhaust oxygen and oil suction, the intake valve timing can be determined with the variation features of energy losses. It was found that at 1200 and 1600 rpm, fuel economy was improved by 12.5–16.6% and 9.7–14.6%, respectively, under VCD in conjunction with the early intake valve closing (EIVC) strategy when the brake mean effective pressure (BMEP) ranged from 0.3 MPa to 0.2 MPa. -
Light-Duty Vehicle Technology Cost Analysis – European Vehicle Market (Phase 1) Prepared For: Submitted
Analysis Report BAV 10-449-001 May 17, 2012 Page 1 Light-Duty Vehicle Technology Cost Analysis – European Vehicle Market (Phase 1) Analysis Report BAV 10-449-001 Prepared for: International Council on Clean Transportation 1225 I Street NW, Suite 900 Washington DC, 20005 http://www.theicct.org/ Submitted by: Greg Kolwich FEV, Inc. 4554 Glenmeade Lane Auburn Hills, MI 48326 Phone: (248) 373-6000 ext. 2411 Email: [email protected] May 17, 2012 Analysis Report BAV 10-449-001 May 17, 2012 Page 2 Contents Section Page A. Executive Summary 9 B. Introduction 16 B.1 Project Overview 16 B.2 Technologies Analyzed 18 B.2.1 Technologies Analyzed in the Phase 1 Analysis 18 B.2.2 Technologies Considered for the Phase 2 Analysis 18 B.3 Process Overview 19 B.3.1 EPA Project Costing Methodology 20 B.3.1.1 EPA Project Cost Methodology Overview 20 B.3.1.2 EPA Detailed Teardown Cost Analysis Process Overview 21 B.3.1.3 EPA Scaling of Cost Analysis Data to Alternative Vehicle Segments 27 B.3.2 ICCT Project Costing Process Overview 31 B.3.2.1 Cost Model Databases 34 B.3.2.2 Technology Configuration & Vehicle Segment Attribute Differences 36 B.4 Market Segment Comparison & Technology Overview 40 B.4.1 North American Market Analysis Overview 40 B.4.2 European Market Analysis Overview 43 B.5 Manufacturing Assumption Overview 45 B.6 Application of ICM Factor 48 B.7 Application of Learning Curve Factor 49 C. Database Updates 53 C.1 Database Update Overview 53 C.2 Material Database 54 C.2.1 Material Database Overview 54 C.2.2 Material Database Updates for European