Mars Rover - Limits of Passive Thermal Design
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

11 Fall Unamagazine
FALL 2011 • VOLUME 19 • No. 3 FOR ALUMNI AND FRIENDS OF THE UNIVERSITY OF NORTH ALABAMA Cover Story 10 ..... Thanks a Million, Harvey Robbins Features 3 ..... The Transition 14 ..... From Zero to Infinity 16 ..... Something Special 20 ..... The Sounds of the Pride 28 ..... Southern Laughs 30 ..... Academic Affairs Awards 33 ..... Excellence in Teaching Award 34 ..... China 38 ..... Words on the Breeze Departments 2 ..... President’s Message 6 ..... Around the Campus 45 ..... Class Notes 47 ..... In Memory FALL 2011 • VOLUME 19 • No. 3 for alumni and friends of the University of North Alabama president’s message ADMINISTRATION William G. Cale, Jr. President William G. Cale, Jr. The annual everyone to attend one of these. You may Vice President for Academic Affairs/Provost Handy festival contact Dr. Alan Medders (Vice President John Thornell is drawing large for Advancement, [email protected]) Vice President for Business and Financial Affairs crowds to the many or Mr. Mark Linder (Director of Athletics, Steve Smith venues where music [email protected]) for information or to Vice President for Student Affairs is being played. At arrange a meeting for your group. David Shields this time of year Sometimes we measure success by Vice President for University Advancement William G. Cale, Jr. it is impossible the things we can see, like a new building. Alan Medders to go anywhere More often, though, success happens one Vice Provost for International Affairs in town and not hear music. The festival student at a time as we provide more and Chunsheng Zhang is also a reminder that we are less than better educational opportunities. -

March 21–25, 2016
FORTY-SEVENTH LUNAR AND PLANETARY SCIENCE CONFERENCE PROGRAM OF TECHNICAL SESSIONS MARCH 21–25, 2016 The Woodlands Waterway Marriott Hotel and Convention Center The Woodlands, Texas INSTITUTIONAL SUPPORT Universities Space Research Association Lunar and Planetary Institute National Aeronautics and Space Administration CONFERENCE CO-CHAIRS Stephen Mackwell, Lunar and Planetary Institute Eileen Stansbery, NASA Johnson Space Center PROGRAM COMMITTEE CHAIRS David Draper, NASA Johnson Space Center Walter Kiefer, Lunar and Planetary Institute PROGRAM COMMITTEE P. Doug Archer, NASA Johnson Space Center Nicolas LeCorvec, Lunar and Planetary Institute Katherine Bermingham, University of Maryland Yo Matsubara, Smithsonian Institute Janice Bishop, SETI and NASA Ames Research Center Francis McCubbin, NASA Johnson Space Center Jeremy Boyce, University of California, Los Angeles Andrew Needham, Carnegie Institution of Washington Lisa Danielson, NASA Johnson Space Center Lan-Anh Nguyen, NASA Johnson Space Center Deepak Dhingra, University of Idaho Paul Niles, NASA Johnson Space Center Stephen Elardo, Carnegie Institution of Washington Dorothy Oehler, NASA Johnson Space Center Marc Fries, NASA Johnson Space Center D. Alex Patthoff, Jet Propulsion Laboratory Cyrena Goodrich, Lunar and Planetary Institute Elizabeth Rampe, Aerodyne Industries, Jacobs JETS at John Gruener, NASA Johnson Space Center NASA Johnson Space Center Justin Hagerty, U.S. Geological Survey Carol Raymond, Jet Propulsion Laboratory Lindsay Hays, Jet Propulsion Laboratory Paul Schenk, -

Seasonal Melting and the Formation of Sedimentary Rocks on Mars, with Predictions for the Gale Crater Mound
Seasonal melting and the formation of sedimentary rocks on Mars, with predictions for the Gale Crater mound Edwin S. Kite a, Itay Halevy b, Melinda A. Kahre c, Michael J. Wolff d, and Michael Manga e;f aDivision of Geological and Planetary Sciences, California Institute of Technology, Pasadena, California 91125, USA bCenter for Planetary Sciences, Weizmann Institute of Science, P.O. Box 26, Rehovot 76100, Israel cNASA Ames Research Center, Mountain View, California 94035, USA dSpace Science Institute, 4750 Walnut Street, Suite 205, Boulder, Colorado, USA eDepartment of Earth and Planetary Science, University of California Berkeley, Berkeley, California 94720, USA f Center for Integrative Planetary Science, University of California Berkeley, Berkeley, California 94720, USA arXiv:1205.6226v1 [astro-ph.EP] 28 May 2012 1 Number of pages: 60 2 Number of tables: 1 3 Number of figures: 19 Preprint submitted to Icarus 20 September 2018 4 Proposed Running Head: 5 Seasonal melting and sedimentary rocks on Mars 6 Please send Editorial Correspondence to: 7 8 Edwin S. Kite 9 Caltech, MC 150-21 10 Geological and Planetary Sciences 11 1200 E California Boulevard 12 Pasadena, CA 91125, USA. 13 14 Email: [email protected] 15 Phone: (510) 717-5205 16 2 17 ABSTRACT 18 A model for the formation and distribution of sedimentary rocks on Mars 19 is proposed. The rate{limiting step is supply of liquid water from seasonal 2 20 melting of snow or ice. The model is run for a O(10 ) mbar pure CO2 atmo- 21 sphere, dusty snow, and solar luminosity reduced by 23%. -

Geophysical and Remote Sensing Study of Terrestrial Planets
GEOPHYSICAL AND REMOTE SENSING STUDY OF TERRESTRIAL PLANETS A Dissertation Presented to The Academic Faculty By Lujendra Ojha In Partial Fulfillment Of the Requirements for the Degree Doctor of Philosophy in Earth and Atmospheric Sciences Georgia Institute of Technology August, 2016 COPYRIGHT © 2016 BY LUJENDRA OJHA GEOPHYSICAL AND REMOTE SENSING STUDY OF TERRESTRIAL PLANETS Approved by: Dr. James Wray, Advisor Dr. Ken Ferrier School of Earth and Atmospheric School of Earth and Atmospheric Sciences Sciences Georgia Institute of Technology Georgia Institute of Technology Dr. Joseph Dufek Dr. Suzanne Smrekar School of Earth and Atmospheric Jet Propulsion laboratory Sciences California Institute of Technology Georgia Institute of Technology Dr. Britney Schmidt School of Earth and Atmospheric Sciences Georgia Institute of Technology Date Approved: June 27th, 2016. To Rama, Tank, Jaika, Manjesh, Reeyan, and Kali. ACKNOWLEDGEMENTS Thanks Mom, Dad and Jaika for putting up with me and always being there. Thank you Kali for being such an awesome girl and being there when I needed you. Kali, you are the most beautiful girl in the world. Never forget that! Thanks Midtown Tavern for the hangovers. Thanks Waffle House for curing my hangovers. Thanks Sarah Sutton for guiding me into planetary science. Thanks Alfred McEwen for the continued support and mentoring since 2008. Thanks Sue Smrekar for taking me under your wings and teaching me about planetary geodynamics. Thanks Dan Nunes for guiding me in the gravity world. Thanks Ken Ferrier for helping me study my favorite planet. Thanks Scott Murchie for helping me become a better scientist. Thanks Marion Masse for being such a good friend and a mentor. -

Appendix I Lunar and Martian Nomenclature
APPENDIX I LUNAR AND MARTIAN NOMENCLATURE LUNAR AND MARTIAN NOMENCLATURE A large number of names of craters and other features on the Moon and Mars, were accepted by the IAU General Assemblies X (Moscow, 1958), XI (Berkeley, 1961), XII (Hamburg, 1964), XIV (Brighton, 1970), and XV (Sydney, 1973). The names were suggested by the appropriate IAU Commissions (16 and 17). In particular the Lunar names accepted at the XIVth and XVth General Assemblies were recommended by the 'Working Group on Lunar Nomenclature' under the Chairmanship of Dr D. H. Menzel. The Martian names were suggested by the 'Working Group on Martian Nomenclature' under the Chairmanship of Dr G. de Vaucouleurs. At the XVth General Assembly a new 'Working Group on Planetary System Nomenclature' was formed (Chairman: Dr P. M. Millman) comprising various Task Groups, one for each particular subject. For further references see: [AU Trans. X, 259-263, 1960; XIB, 236-238, 1962; Xlffi, 203-204, 1966; xnffi, 99-105, 1968; XIVB, 63, 129, 139, 1971; Space Sci. Rev. 12, 136-186, 1971. Because at the recent General Assemblies some small changes, or corrections, were made, the complete list of Lunar and Martian Topographic Features is published here. Table 1 Lunar Craters Abbe 58S,174E Balboa 19N,83W Abbot 6N,55E Baldet 54S, 151W Abel 34S,85E Balmer 20S,70E Abul Wafa 2N,ll7E Banachiewicz 5N,80E Adams 32S,69E Banting 26N,16E Aitken 17S,173E Barbier 248, 158E AI-Biruni 18N,93E Barnard 30S,86E Alden 24S, lllE Barringer 29S,151W Aldrin I.4N,22.1E Bartels 24N,90W Alekhin 68S,131W Becquerei -
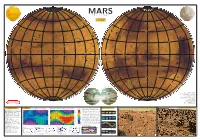
In Pdf Format
lós 1877 Mik 88 ge N 18 e N i h 80° 80° 80° ll T 80° re ly a o ndae ma p k Pl m os U has ia n anum Boreu bal e C h o A al m re u c K e o re S O a B Bo l y m p i a U n d Planum Es co e ria a l H y n d s p e U 60° e 60° 60° r b o r e a e 60° l l o C MARS · Korolev a i PHOTOMAP d n a c S Lomono a sov i T a t n M 1:320 000 000 i t V s a Per V s n a s l i l epe a s l i t i t a s B o r e a R u 1 cm = 320 km lkin t i t a s B o r e a a A a A l v s l i F e c b a P u o ss i North a s North s Fo d V s a a F s i e i c a a t ssa l vi o l eo Fo i p l ko R e e r e a o an u s a p t il b s em Stokes M ic s T M T P l Kunowski U 40° on a a 40° 40° a n T 40° e n i O Va a t i a LY VI 19 ll ic KI 76 es a As N M curi N G– ra ras- s Planum Acidalia Colles ier 2 + te . -

Acte Argeo Final
ELECTRICITY AND FRESHWATER MACRO-PROJECT IN THE ARID AFRICAN LANDSCAPE OF DJIBOUTI Radu D. Rugescu Richard B. Cathcart Dragos Ronald Rugescu Sergiu Paul Vataman INTRODUCTION Bordering the Gulf of Aden and the Red Sea, the economically underdeveloped Republic of Djibouti gained its independence on June 27, 1977 from the former territory of the French Somaliland (later called the French Territory of the Afars and Issas), which was created in the first half of the 19 th Century as a result of French interest in the Horn of Africa. It is a 23,200 km 2 coastal dryland ecosystem-nation without any perennial rivers, generally described as a drab and hot desert-type landscape of ochre-colored geomorphology situated near the Bab-al-Mandab Strait, international shipping’s southernmost Red Sea entrance/exit (Fig. 1). Figure 1: Map of the Republic of Djibouti indicating its most pronounced physical features as well as its immediate surroundings. A Bab-al-Mandab dam-construction macro-project has been proposed to regulate the Red Sea for the purpose of electricity generation on a truly monumental scale (Schuiling et al 2007); were the Bab-al-Mandab Dam built it might induce further seaport development in Djibouti. Macro-engineers have already proposed a plan to “tent” most of the Sahara, which lies to the west of Djibouti (Cathcart and Badescu, 2004). The DESERTEC Foundation is actively formulating a macro-engineering concept to produce electricity and freshwater on a spatially semi-continental scale (Strahan, 2009). During 2010, DESERTEC’s geographical planning boundaries, encompassing spatially widespread industrial-scale electricity generation installations (concentrating solar power, photovoltaics, wind-power, geothermal, biomass and hydropower), do not yet include any Republic of Djibouti territory. -

Exobiology in the Solar System & the Search for Life on Mars
SP-1231 SP-1231 October 1999 Exobiology in the Solar System & The Search for Life on Mars for The Search Exobiology in the Solar System & Exobiology in the Solar System & The Search for Life on Mars Report from the ESA Exobiology Team Study 1997-1998 Contact: ESA Publications Division c/o ESTEC, PO Box 299, 2200 AG Noordwijk, The Netherlands Tel. (31) 71 565 3400 - Fax (31) 71 565 5433 SP-1231 October 1999 EXOBIOLOGY IN THE SOLAR SYSTEM AND THE SEARCH FOR LIFE ON MARS Report from the ESA Exobiology Team Study 1997-1998 Cover Fossil coccoid bacteria, 1 µm in diameter, found in sediment 3.3-3.5 Gyr old from the Early Archean of South Africa. See pages 160-161. Background: a portion of the meandering canyons of the Nanedi Valles system viewed by Mars Global Surveyor. The valley is about 2.5 km wide; the scene covers 9.8 km by 27.9 km centred on 5.1°N/48.26°W. The valley floor at top right exhibits a 200 m-wide channel covered by dunes and debris. This channel suggests that the valley might have been carved by water flowing through the system over a long period, in a manner similar to rivers on Earth. (Malin Space Science Systems/NASA) SP-1231 ‘Exobiology in the Solar System and The Search for Life on Mars’, ISBN 92-9092-520-5 Scientific Coordinators: André Brack, Brian Fitton and François Raulin Edited by: Andrew Wilson ESA Publications Division Published by: ESA Publications Division ESTEC, Noordwijk, The Netherlands Price: 70 Dutch Guilders/ EUR32 Copyright: © 1999 European Space Agency Contents Foreword 7 I An Exobiological View of the -

The Environmental Effects of Very Large Bolide Impacts on Early Mars Explored with a Hierarchy of Numerical Models
The environmental effects of very large bolide impacts on early Mars explored with a hierarchy of numerical models Martin Turbet, Cedric Gillmann, Francois Forget, Baptiste Baudin, Ashley Palumbo, James Head, Ozgur Karatekin To cite this version: Martin Turbet, Cedric Gillmann, Francois Forget, Baptiste Baudin, Ashley Palumbo, et al.. The environmental effects of very large bolide impacts on early Mars explored with a hierarchy ofnumerical models. Icarus, Elsevier, 2020, 335, pp.113419. 10.1016/j.icarus.2019.113419. hal-03103944 HAL Id: hal-03103944 https://hal.archives-ouvertes.fr/hal-03103944 Submitted on 8 Jan 2021 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. The environmental effects of very large bolide impacts on early Mars explored with a hierarchy of numerical models Martin Turbet1, Cedric Gillmann2,3, Francois Forget1, Baptiste Baudin1,4, Ashley Palumbo5, James Head5, and Ozgur Karatekin2 1Laboratoire de Met´ eorologie´ Dynamique/IPSL, CNRS, Sorbonne Universite,´ Ecole normale superieure,´ PSL Research University, Ecole Polytechnique, 75005 Paris, France. 2Royal Observatory of Belgium, Brussels, Belgium 3Free University of Brussels, Department of Geosciences, G-Time, Brussels, Belgium 4Magistere` de Physique Fondamentale, Departement´ de Physique, Univ. Paris-Sud, Universite´ Paris-Saclay, 91405 Orsay Campus, France. -
1912 the Mountaineers
The Mountaineer. Volume Five Nineteen Hundred Twelve h611, •• , ,, The Mountaineen Sea11le. Wa1hla1100 :J1'.)1'1zec1 bv G oog I e 2,-�a""" ...._� _..,..i..c.. tyJ Vi) Copyright 1912 The Mountaineers Din,tiZ<'d by Google CONTENTS Page Greeting ................... ................................John Muir .......................................... Greeting ..................................................... Enos Mills ........................................ The Higher Functions of a Mountain Club................................................... \ Wm. Frederic Bade.......................... 9 Little Tahoma ............ ............................. .Edmond S. Meany............................ 13 Mountaineer Outing of 1912 on north side of Mt. Rainier....................... Mary Paschall ................................... 14 Itinerary of Outing of 1912................... .Charles S. Gleason........................... 26 The Ascent of Mt. Rainier.................... £. M.Hack ........................................ 28 Grand Park .............................................. 1=dmond S. Meany............................ 36 A New Route up Mt. Rainier.............. 'Jara Keen ........................................ 37 Naches Pass .............................................. Edmond S. Meany....... ,.................... 40 Undescribed Glaciers of Mt. Rainier .. Fran,ois Matthes ............................. 42 Thermal Caves ....................................... J. B. Flett .......................................... 58 Change in Willis -

The Mars Astrobiology Explorer-Cacher (MAX-C): a Potential Rover Mission for 2018
ASTROBIOLOGY Volume 10, Number 2, 2010 News & Views ª Mary Ann Liebert, Inc. DOI: 10.1089=ast.2010.0462 The Mars Astrobiology Explorer-Cacher (MAX-C): A Potential Rover Mission for 2018 Final Report of the Mars Mid-Range Rover Science Analysis Group (MRR-SAG) October 14, 2009 Table of Contents 1. Executive Summary 127 2. Introduction 129 3. Scientific Priorities for a Possible Late-Decade Rover Mission 130 4. Development of a Spectrum of Possible Mission Concepts 131 5. Evaluation, Prioritization of Candidate Mission Concepts 132 6. Strategy to Achieve Primary In Situ Objectives 136 7. Relationship to a Potential Sample Return Campaign 141 8. Consensus Mission Vision 146 9. Considerations Related to Landing Site Selection 147 10. Some Engineering Considerations Related to the Consensus Mission Vision 152 11. Acknowledgments 156 12. Abbreviations 156 13. References 156 1. Executive Summary use the Mars Science Laboratory (MSL) sky-crane landing system and include a single solar-powered rover. The mis- his report documents the work of the Mid-Range Ro- sion would also have a targeting accuracy of *7km Tver Science Analysis Group (MRR-SAG), which was (semimajor axis landing ellipse), a mobility range of at least assigned to formulate a concept for a potential rover mission 10 km, and a lifetime on the martian surface of at least 1 that could be launched to Mars in 2018. Based on pro- Earth year. An additional key consideration, given recently grammatic and engineering considerations as of April 2009, declining budgets and cost growth issues with MSL, is that our deliberations assumed that the potential mission would the proposed rover must have lower cost and cost risk than Members: Lisa M. -

Tuscaloosa Bicentennial Celebration
OLLI Joins in the Alabama and Tuscaloosa Bicentennial Celebration During 2019, OLLI will be offering classes, field trips, and special programs that will explore the evolution of our state, as well as, the city of Tuscaloosa. Join us, as we look at our past and celebrate the opportunities we have for the future. 1819 was an important year in the history of Tuscaloosa and Alabama. • On December 13, 1819, the town of Tuscaloosa was incorporated. • The following day, Alabama became the 22nd state in the United States. From the War of 1812 and the Creek Indian War, we have seen struggles and opportunities to become the place we now call “home”. Alabama offers so much diversity in our landscapes, from the mountains to the beaches that make up our state. The people who settled this state have also enriched it through cultural diversity, with the State having been under more than seven different flags. From the Civil War and Reconstruction years, we moved into the forefront of the Civil Rights Movement of our country. We have seen a transformation from a largely agrarian economy to one that represents technology and other thriving interests. Check out the many OLLI offerings on page 5 and for the complete listing of bicentennial events offered visit alabama200.org and tuscaloosa200.com. Advisory Board Members 2018-2019 President Elizabeth Aversa [email protected] Past President Richard Rhone [email protected] VP, Long-Range Philip Malone [email protected] VP, Curriculum David Maxwell [email protected] Secretary Marty Massengale [email protected] Treasurer Dot Martin [email protected] Parliamentarian Edward “Buck” Whatley [email protected] OLLI is one of the many programs in the Historian Hattie Kaufman [email protected] College of Continuing Studies and we are Tuscaloosa Member-at-Large Patti Trethaway [email protected] Tuscaloosa Member-at-Large Linda Olivet [email protected] proud to be a part of the 100 Year Celebration.