Mars in the News
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mars Reconnaissance Orbiter
Chapter 6 Mars Reconnaissance Orbiter Jim Taylor, Dennis K. Lee, and Shervin Shambayati 6.1 Mission Overview The Mars Reconnaissance Orbiter (MRO) [1, 2] has a suite of instruments making observations at Mars, and it provides data-relay services for Mars landers and rovers. MRO was launched on August 12, 2005. The orbiter successfully went into orbit around Mars on March 10, 2006 and began reducing its orbit altitude and circularizing the orbit in preparation for the science mission. The orbit changing was accomplished through a process called aerobraking, in preparation for the “science mission” starting in November 2006, followed by the “relay mission” starting in November 2008. MRO participated in the Mars Science Laboratory touchdown and surface mission that began in August 2012 (Chapter 7). MRO communications has operated in three different frequency bands: 1) Most telecom in both directions has been with the Deep Space Network (DSN) at X-band (~8 GHz), and this band will continue to provide operational commanding, telemetry transmission, and radiometric tracking. 2) During cruise, the functional characteristics of a separate Ka-band (~32 GHz) downlink system were verified in preparation for an operational demonstration during orbit operations. After a Ka-band hardware anomaly in cruise, the project has elected not to initiate the originally planned operational demonstration (with yet-to-be used redundant Ka-band hardware). 201 202 Chapter 6 3) A new-generation ultra-high frequency (UHF) (~400 MHz) system was verified with the Mars Exploration Rovers in preparation for the successful relay communications with the Phoenix lander in 2008 and the later Mars Science Laboratory relay operations. -

Tianwen-1: China's Mars Mission
Tianwen-1: China's Mars Mission drishtiias.com/printpdf/tianwen-1-china-s-mars-mission Why In News China will launch its first Mars Mission - Tianwen-1- in July, 2020. China's previous ‘Yinghuo-1’ Mars mission, which was supported by a Russian spacecraft, had failed after it did not leave the earth's orbit and disintegrated over the Pacific Ocean in 2012. The National Aeronautics and Space Administration (NASA) is also going to launch its own Mars mission in July, the Perseverance which aims to collect Martian samples. Key Points The Tianwen-1 Mission: It will lift off on a Long March 5 rocket, from the Wenchang launch centre. It will carry 13 payloads (seven orbiters and six rovers) that will explore the planet. It is an all-in-one orbiter, lander and rover system. Orbiter: It is a spacecraft designed to orbit a celestial body (astronomical body) without landing on its surface. Lander: It is a strong, lightweight spacecraft structure, consisting of a base and three sides "petals" in the shape of a tetrahedron (pyramid- shaped). It is a protective "shell" that houses the rover and protects it, along with the airbags, from the forces of impact. Rover: It is a planetary surface exploration device designed to move across the solid surface on a planet or other planetary mass celestial bodies. 1/3 Objectives: The mission will be the first to place a ground-penetrating radar on the Martian surface, which will be able to study local geology, as well as rock, ice, and dirt distribution. It will search the martian surface for water, investigate soil characteristics, and study the atmosphere. -

Mars, the Nearest Habitable World – a Comprehensive Program for Future Mars Exploration
Mars, the Nearest Habitable World – A Comprehensive Program for Future Mars Exploration Report by the NASA Mars Architecture Strategy Working Group (MASWG) November 2020 Front Cover: Artist Concepts Top (Artist concepts, left to right): Early Mars1; Molecules in Space2; Astronaut and Rover on Mars1; Exo-Planet System1. Bottom: Pillinger Point, Endeavour Crater, as imaged by the Opportunity rover1. Credits: 1NASA; 2Discovery Magazine Citation: Mars Architecture Strategy Working Group (MASWG), Jakosky, B. M., et al. (2020). Mars, the Nearest Habitable World—A Comprehensive Program for Future Mars Exploration. MASWG Members • Bruce Jakosky, University of Colorado (chair) • Richard Zurek, Mars Program Office, JPL (co-chair) • Shane Byrne, University of Arizona • Wendy Calvin, University of Nevada, Reno • Shannon Curry, University of California, Berkeley • Bethany Ehlmann, California Institute of Technology • Jennifer Eigenbrode, NASA/Goddard Space Flight Center • Tori Hoehler, NASA/Ames Research Center • Briony Horgan, Purdue University • Scott Hubbard, Stanford University • Tom McCollom, University of Colorado • John Mustard, Brown University • Nathaniel Putzig, Planetary Science Institute • Michelle Rucker, NASA/JSC • Michael Wolff, Space Science Institute • Robin Wordsworth, Harvard University Ex Officio • Michael Meyer, NASA Headquarters ii Mars, the Nearest Habitable World October 2020 MASWG Table of Contents Mars, the Nearest Habitable World – A Comprehensive Program for Future Mars Exploration Table of Contents EXECUTIVE SUMMARY .......................................................................................................................... -

Mars 2020 Radiological Contingency Planning
National Aeronautics and Space Administration Mars 2020 Radiological Contingency Planning NASA plans to launch the Mars 2020 rover, produce the rover’s onboard power and to Perseverance, in summer 2020 on a mission warm its internal systems during the frigid to seek signs of habitable conditions in Mars’ Martian night. ancient past and search for signs of past microbial life. The mission will lift off from Cape NASA prepares contingency response plans Canaveral Air Force Station in Florida aboard a for every launch that it conducts. Ensuring the United Launch Alliance Atlas V launch vehicle safety of launch-site workers and the public in between mid-July and August 2020. the communities surrounding the launch area is the primary consideration in this planning. The Mars 2020 rover design is based on NASA’s Curiosity rover, which landed on Mars in 2012 This contingency planning task takes on an and greatly increased our knowledge of the added dimension when the payload being Red Planet. The Mars 2020 rover is equipped launched into space contains nuclear material. to study its landing site in detail and collect and The primary goal of radiological contingency store the most promising samples of rock and planning is to enable an efficient response in soil on the surface of Mars. the event of an accident. This planning is based on the fundamental principles of advance The system that provides electrical power for preparation (including rehearsals of simulated Mars 2020 and its scientific equipment is the launch accident responses), the timely availability same as for the Curiosity rover: a Multi- of technically accurate and reliable information, Mission Radioisotope Thermoelectric Generator and prompt external communication with the (MMRTG). -

Mars Helicopter/Ingenuity
National Aeronautics and Space Administration Mars Helicopter/Ingenuity When NASA’s Perseverance rover lands on February 18, 2021, it will be carrying a passenger onboard: the first helicopter ever designed to fly in the thin Martian air. The Mars Helicopter, Ingenuity, is a small, or as full standalone science craft carrying autonomous aircraft that will be carried to instrument payloads. Taking to the air would the surface of the Red Planet attached to the give scientists a new perspective on a region’s belly of the Perseverance rover. Its mission geology and even allow them to peer into is experimental in nature and completely areas that are too steep or slippery to send independent of the rover’s science mission. a rover. In the distant future, they might even In the months after landing, the helicopter help astronauts explore Mars. will be placed on the surface to test – for the first time ever – powered flight in the thin The project is solely a demonstration of Martian air. Its performance during these technology; it is not designed to support the experimental test flights will help inform Mars 2020/Perseverance mission, which decisions relating to considering small is searching for signs of ancient life and helicopters for future Mars missions, where collecting samples of rock and sediment in they could perform in a support role as tubes for potential return to Earth by later robotic scouts, surveying terrain from above, missions. This illustration shows the Mars Helicopter Ingenuity on the surface of Mars. Key Objectives Key Features • Prove powered flight in the thin atmosphere of • Weighs 4 pounds (1.8 kg) Mars. -

1 Cross-Calibration of Laser-Induced Breakdown Spectroscopy (LIBS)
ISSI/ISSI-BJ Joint Call for Proposals 2018 International Teams in Space and Earth Sciences Cross-calibration of Laser-Induced Breakdown Spectroscopy (LIBS) instruments for planetary exploration. 1 Summary of the project : A revolutionary technique for planetary science: Laser-induced Breakdown Spectroscopy (LIBS) is an active analytical technique that makes use of a pulsed laser to ablate material of interest at a distance. The atoms in the high temperature plasma emit at specific wavelengths from the UV to near- IR and the light can be analyzed by spectrometry to determine the composition of the target [1]. Since 2012, LIBS has been successfully used under low atmospheric pressure for exploring the geology of Mars at Gale Crater with the Mars Science Laboratory rover’s ChemCam instrument [2-4]. LIBS can be used to analyze single regolith mineral particles and larger rocks, giving major and minor elements compositions. Moreover, LIBS is sensitive to volatile elements (H, Na, etc.) that are of intrinsic interest to understand key planetary processes. The generated shock wave can also ablate dust covering rocks to allow further analysis by other instruments on the mission platform (rover, lander). In order to quantify the elemental composition of various targets, large laboratory samples analyses are required for calibration, with ChemCam’s calibration database containing more than 400 standards [5-6]. LIBS is becoming international: Due to its ease of deployment and rapidity of analysis, LIBS has shown a great potential as a chemistry survey instrument for the next generation of in situ space missions to planets, satellites and small bodies. In the next couple of years, three more LIBS space instruments will be sent for planetary exploration by teams representing several different nationalities In 2018, the Indian space mission to the Moon Chandrayaan 2 will comprise a rover equipped with a small portable LIBS instrument for regolith reconnaissance around the landing site [7]. -
Build Your Own Mars Helicopter
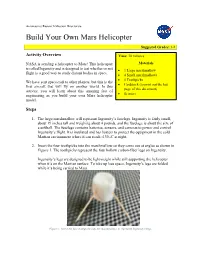
Aeronautics Research Mission Directorate Build Your Own Mars Helicopter Suggested Grades: 3-8 Activity Overview Time: 30 minutes NASA is sending a helicopter to Mars! This helicopter Materials is called Ingenuity and is designed to test whether or not • 1 Large marshmallow flight is a good way to study distant bodies in space. • 4 Small marshmallows • 5 Toothpicks We have sent spacecraft to other planets, but this is the • Cardstock (to print out the last first aircraft that will fly on another world. In this page of this document) activity, you will learn about this amazing feat of engineering as you build your own Mars helicopter • Scissors model. Steps 1. The large marshmallow will represent Ingenuity’s fuselage. Ingenuity is fairly small, about 19 inches tall and weighing about 4 pounds, and the fuselage is about the size of a softball. The fuselage contains batteries, sensors, and cameras to power and control Ingenuity’s flight. It is insulated and has heaters to protect the equipment in the cold Martian environment where it can reach -130 oC at night. 2. Insert the four toothpicks into the marshmallow so they come out at angles as shown in Figure 1. The toothpicks represent the four hollow carbon-fiber legs on Ingenuity. Ingenuity’s legs are designed to be lightweight while still supporting the helicopter when it’s on the Martian surface. To take up less space, Ingenuity’s legs are folded while it’s being carried to Mars. / Figure 1. Insert the four toothpicks into the marshmallow to represent Ingenuity's legs. 3. -
SATELLITE DATA for Weather Forecasting
VOL. 98 NO. 3 MAR 2017 Mars 2020 Mission Earth Science Jobs: Seven Projections Earth & Space Science News Landsat Archive of Greenland Glaciers SATELLITE DATA for Weather Forecasting Earth & Space Science News Contents MARCH 2017 VOLUME 98, ISSUE 3 PROJECT UPDATE 20 Using LANDSAT to Take the Long View on Greenland Glaciers A new web-based data portal gives scientists access to more than 40 years of satellite imagery, providing seasonal to long-term insights into outflows from Greenland’s ice sheet. PROJECT UPDATE 32 Seeking Signs of Life and More: NASA’s Mars 2020 Mission The next Mars rover will be able to land near rugged terrain, giving scientists access to diverse landscapes. It will also cache core samples, a first step in the quest 26 to return samples to Earth. COVER OPINION Transforming Satellite Data Seven Projections 14 for Earth and Space into Weather Forecasts Science Jobs What do recent political changes mean A NASA project spans the gap between research and operations, for the job market? In the short term, not introducing new composites of satellite imagery to weather much. But long term, expect privatization, forecasters. contract employment, and more. Earth & Space Science News Eos.org // 1 Contents DEPARTMENTS Editor in Chief Barbara T. Richman: AGU, Washington, D. C., USA; eos_ [email protected] Editors Christina M. S. Cohen Wendy S. Gordon Carol A. Stein California Institute Ecologia Consulting, Department of Earth and of Technology, Pasadena, Austin, Texas, USA; Environmental Sciences, Calif., USA; wendy@ecologiaconsulting University of Illinois at cohen@srl .caltech.edu .com Chicago, Chicago, Ill., José D. -

Radar Imager for Mars' Subsurface Experiment—RIMFAX
Space Sci Rev (2020) 216:128 https://doi.org/10.1007/s11214-020-00740-4 Radar Imager for Mars’ Subsurface Experiment—RIMFAX Svein-Erik Hamran1 · David A. Paige2 · Hans E.F. Amundsen3 · Tor Berger 4 · Sverre Brovoll4 · Lynn Carter5 · Leif Damsgård4 · Henning Dypvik1 · Jo Eide6 · Sigurd Eide1 · Rebecca Ghent7 · Øystein Helleren4 · Jack Kohler8 · Mike Mellon9 · Daniel C. Nunes10 · Dirk Plettemeier11 · Kathryn Rowe2 · Patrick Russell2 · Mats Jørgen Øyan4 Received: 15 May 2020 / Accepted: 25 September 2020 © The Author(s) 2020 Abstract The Radar Imager for Mars’ Subsurface Experiment (RIMFAX) is a Ground Pen- etrating Radar on the Mars 2020 mission’s Perseverance rover, which is planned to land near a deltaic landform in Jezero crater. RIMFAX will add a new dimension to rover investiga- tions of Mars by providing the capability to image the shallow subsurface beneath the rover. The principal goals of the RIMFAX investigation are to image subsurface structure, and to provide information regarding subsurface composition. Data provided by RIMFAX will aid Perseverance’s mission to explore the ancient habitability of its field area and to select a set of promising geologic samples for analysis, caching, and eventual return to Earth. RIM- FAX is a Frequency Modulated Continuous Wave (FMCW) radar, which transmits a signal swept through a range of frequencies, rather than a single wide-band pulse. The operating frequency range of 150–1200 MHz covers the typical frequencies of GPR used in geology. In general, the full bandwidth (with effective center frequency of 675 MHz) will be used for The Mars 2020 Mission Edited by Kenneth A. -

The Supercam Remote Raman Spectrometer for Mars 2020 R.C
Lunar and Planetary Science XLVIII (2017) 2600.pdf THE SUPERCAM REMOTE RAMAN SPECTROMETER FOR MARS 2020 R.C. Wiens1, R. Newell1, S. Clegg1, S.K. Sharma2, A. Misra2, P. Bernardi3, S. Maurice4, K. McCabe1, P. Cais5, and the SuperCam Science Team (1LANL, Los Alamos, NM; [email protected], 2U. Hawaii; 3LESIA; 4IRAP; 5LAB) Overview: The Mars 2020 Science Definition length calibration as well as to have reasonable Team developed criteria for advanced instrumen- resolution; b) to identify a mineral by resolving tation for the next NASA rover. One important two of its closely-spaced peaks. Examples of this criterion is to provide mineral compositions at are olivine or albite whose twin peaks are gener- remote distances [1]. Hence, the SuperCam in- ally characteristic of their spectra; and c) to iden- strument that was selected provides two remote tify the presence of two or more minerals in the mineralogy techniques: passive visible and infra- same spectrum by resolving their respective red (VISIR) reflectance spectroscopy and remote peaks. An example is quartz and albite, which Raman spectroscopy. These are in addition to often occur together. A FWHM of 12 cm-1 vali- providing co-bore-sighted remote elemental com- dated on a naturally narrow emission line meets positions, color images, and acoustic spectra all of the above needs. There are other ways of (sounds) [2]. SuperCam’s remote Raman spec- specifying resolution, such as the pixel spread or troscopy complements the rover’s in-situ Raman the theoretical resolution of a system. For exam- experiment, SHERLOC (see below; [3]), and ple, the 12 cm-1 FWHM criterion is better than RLS on ExoMars, as the first Raman spectrome- examples labeled in [4] as “4 cm-1”, the highest ters to be built for another planet. -

Detecting Perseverance's Landing with Insight
manuscript submitted to JGR: Planets 1 Listening for the Mars 2020 Landing Sequence with InSight 2 Listening for the Landing: Detecting Perseverance's 3 landing with InSight 1 2 3;4 4 Benjamin Fernando , Natalia W´ojcicka , Marouchka Froment , Ross 5;6 7 8 2 5 Maguire , Simon C. St¨ahler , Lucie Rolland , Gareth S. Collins , Ozgur 9 3 10 11 6 Karatekin , Carene Larmat , Eleanor K. Sansom , Nicholas A. Teanby , 12;13 5 14 7 Aymeric Spiga , Foivos Karakostas , Kuangdai Leng , Tarje 1 4 7 4 8 Nissen-Meyer , Taichi Kawamura , Dominico Giardini , Philippe Lognonn´e , 15 16 9 Bruce Banerdt , Ingrid J. Daubar 1 10 Department of Earth Sciences, University of Oxford, South Parks Road, Oxford, OX1 4AR, UK 2 11 Department of Earth Science and Engineering, Imperial College, London, SW7 2AZ, UK 3 12 Earth and Environmental Sciences Division, Los Alamos National Laboratory, Los Alamos, NM, USA 4 13 Universit´ede Paris, Institut de Physique du Globe de Paris, CNRS, Paris, France 5 14 Department of Geology, University of Maryland, College Park, MD, USA 6 15 Department of Computational Mathematics, Science, and Engineering, Michigan State University, East 16 Lansing, MI, USA 7 17 Department of Earth Sciences, ETH Zurich, Sonneggstrasse 5, 8092 Z¨urich, Switzerland 8 18 Universit´eC^oted'Azur, Observatoire de la C^oted'Azur, CNRS, IRD, G´eoazur,France 9 19 Royal Observatory of Belgium, Belgium 10 20 Space Science and Technology Centre, Curtin University, Australia 11 21 School of Earth Sciences, University of Bristol, Wills Memorial Building, Queens Road, -

Supercam Calibration Targets: Design and Development J
SuperCam Calibration Targets: Design and Development J. Manrique, G. Lopez-Reyes, A. Cousin, F. Rull, S. Maurice, R. Wiens, M. Madsen, J. Madariaga, O. Gasnault, J. Aramendia, et al. To cite this version: J. Manrique, G. Lopez-Reyes, A. Cousin, F. Rull, S. Maurice, et al.. SuperCam Calibration Tar- gets: Design and Development. Space Science Reviews, Springer Verlag, 2020, 216 (8), pp.138. 10.1007/s11214-020-00764-w. hal-03048873 HAL Id: hal-03048873 https://hal.archives-ouvertes.fr/hal-03048873 Submitted on 3 Jan 2021 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Space Sci Rev (2020) 216:138 https://doi.org/10.1007/s11214-020-00764-w SuperCam Calibration Targets: Design and Development J.A. Manrique1 · G. Lopez-Reyes1 · A. Cousin2 · F. Rull 1 · S. Maurice2 · R.C. Wiens3 · M.B. Madsen4 · J.M. Madariaga5 · O. Gasnault2 · J. Aramendia5 · G. Arana5 · P. Beck6 · S. Bernard7 · P. Bernardi 8 · M.H. Bernt4 · A. Berrocal9 · O. Beyssac7 · P. Caïs 10 · C. Castro11 · K. Castro5 · S.M. Clegg3 · E. Cloutis12 · G. Dromart13 · C. Drouet14 · B. Dubois15 · D. Escribano16 · C. Fabre17 · A. Fernandez11 · O. Forni2 · V.