Multilateration and Kalman Filtering Techniques for Stealth Intelligence Surveillance and Reconnaissance Using Multistatic Radar
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Solving the Multilateration Problem Without Iteration
Article Solving the Multilateration Problem without Iteration Thomas H. Meyer 1 and Ahmed F. Elaksher 2,* 1 Department of Natural Resources and the Environment, College of Agriculture, Health, and Natural Resources, University of Connecticut, Storrs, CT 06269-4087, USA; [email protected] 2 Geomatics Program, College of Engineering, New Mexico State University, Las Cruces, NM 88003, USA * Correspondence: [email protected] Abstract: The process of positioning, using only distances from control stations, is called trilateration (or multilateration if the problem is over-determined). The observation equation is Pythagoras’s formula, in terms of the summed squares of coordinate differences and, thus, is nonlinear. There is one observation equation for each control station, at a minimum, which produces a system of simultaneous equations to solve. Over-determined nonlinear systems of simultaneous equations are typically solved using iterative least squares after forming the system as a truncated Taylor’s series, omitting the nonlinear terms. This paper provides a linearization of the observation equation that is not a truncated infinite series—it is exact—and, thus, is solved exactly, with full rigor, without iteration and, thus, without the need of first providing approximate coordinates to seed the iteration. However, there is a cost of requiring an additional observation beyond that required by the non-linear approach. The examples and terminology come from terrestrial land surveying, but the method is fully general: it works for, say, radio beacon positioning, as well. The approach can use slope distances directly, which avoids the possible errors introduced by atmospheric refraction into the zenith-angle observations needed to provide horizontal distances. -

Tracking Non-Cooperative Low Earth Orbit Objects Using GNSS Satellites As a Multi-Static Radar
Tracking non-cooperative low earth orbit objects using GNSS satellites as a multi-static radar Md Sohrab Mahmud Andrew Lambert Craig Benson [email protected] [email protected] [email protected] School of Engineering and Information Technology University of New South Wales, Canberra Abstract Space debris is a growing hazard since space activity and the amount of space debris are both increasing. If the risks posed by space object collisions cannot be mitigated, this will hinder the future use of space. Accurate knowledge of the trajectory and behavior of satellites and debris is required to mitigate collision risks as the density of space objects increases. This requires space object tracking systems that are both affordable and scale well for very large numbers of objects under observation. Wide field of view, all-weather, passive systems scale well for reliable surveillance of very large numbers of objects. Global Navigation Satellite System (GNSS) satellites have been proposed as potential illuminators of opportunity to track Low Earth Orbit (LEO) debris, paired with ground-based receivers in a bistatic arrangement. In this paper, we discuss the signal characteristics used in these observations, the results of recent relevant laboratory-based experiments, simulation work performed in preparation for on-orbit experiments of these techniques, and our plans for the development of a system capable of tracking LEO debris to enhance space situational awareness. Introduction Space debris is an existing and growing problem for active satellites and future space missions. Since the first ever space mission, Sputnik 1, up to now, the number of tracked objects as small as 10 cm is catalogued as 43,931 (Kelso, 2018). -

Prof. Hugh Griffiths
Passive Radar - From Inception to Maturity Hugh Griffiths Senior Past President, IEEE AES Society 2017 IEEE Picard Medal IEEE AESS Distinguished Lecturer THALES / Royal Academy of Engineering Chair of RF Sensors University College London Radar Symposium, Ben-Gurion University of the Negev, 13 February 2017 OUTLINE • Introduction and definitions • Some history • Bistatic radar properties: geometry, radar equation, target properties • Passive radar illuminators • Passive radar systems and results • The future … 2 BISTATIC RADAR: DEFINITIONS MONOSTATIC RADAR MULTILATERATION RADAR Tx & Rx at same, or nearly Radar net using range-only data the same, location MULTISTATIC RADAR BISTATIC RADAR Bistatic radar net with multiple Txs Tx & Rx separated by a and/or RXs. considerable distance in order to achieve a technical, operational or cost benefit HITCHHIKER Bistatic Rx operating with the Tx of a monostatic radar RADAR NET Several radars linked together to improve PASSIVE BISTATIC RADAR coverage* or accuracy Bistatic Rx operating with other Txs of opportunity * Enjoys the union of individual coverage areas. All others 3 require the intersection of individual coverage areas. Coverage area: (SNR + BW + LOS) 3 BISTATIC RADAR • Bistatic radar has potential advantages in detection of stealthy targets which are shaped to scatter energy in directions away from the monostatic • The receiver is covert and therefore safer in many situations • Countermeasures are difficult to deploy against bistatic radar • Increasing use of systems based on unmanned air vehicles (UAVs) makes bistatic systems attractive • Many of the synchronisation and geolocation problems that were previously very difficult are now readily soluble using GPS, and • The extra degrees of freedom may make it easier to extract information from bistatic clutter for remote sensing applications 4 4 BISTATIC RADAR • The first radars were bistatic (till T/R switches were invented) • First resurgence (1950 – 1960): semi-active homing missiles, SPASUR, …. -

A Survey of Indoor Localization Systems and Technologies Faheem Zafari, Student Member, IEEE, Athanasios Gkelias, Senior Member, IEEE, Kin K
1 A Survey of Indoor Localization Systems and Technologies Faheem Zafari, Student Member, IEEE, Athanasios Gkelias, Senior Member, IEEE, Kin K. Leung, Fellow, IEEE Abstract—Indoor localization has recently witnessed an in- cities [5], smart buildings [6], smart grids [7]) and Machine crease in interest, due to the potential wide range of services it Type Communication (MTC) [8]. can provide by leveraging Internet of Things (IoT), and ubiqui- IoT is an amalgamation of numerous heterogeneous tech- tous connectivity. Different techniques, wireless technologies and mechanisms have been proposed in the literature to provide nologies and communication standards that intend to provide indoor localization services in order to improve the services end-to-end connectivity to billions of devices. Although cur- provided to the users. However, there is a lack of an up- rently the research and commercial spotlight is on emerging to-date survey paper that incorporates some of the recently technologies related to the long-range machine-to-machine proposed accurate and reliable localization systems. In this communications, existing short- and medium-range technolo- paper, we aim to provide a detailed survey of different indoor localization techniques such as Angle of Arrival (AoA), Time of gies, such as Bluetooth, Zigbee, WiFi, UWB, etc., will remain Flight (ToF), Return Time of Flight (RTOF), Received Signal inextricable parts of the IoT network umbrella. While long- Strength (RSS); based on technologies such as WiFi, Radio range IoT technologies aim to provide high coverage and low Frequency Identification Device (RFID), Ultra Wideband (UWB), power communication solution, they are incapable to support Bluetooth and systems that have been proposed in the literature. -

P-180U and MARS-L Radar Purchase from Ukraine and Turaf PYAS
P-180U and MARS-L Radar Purchase from Ukraine and TuRAF PYAS Project by İbrahim SÜNNETÇİ According to Ukrainian based combined PSR/ the SSR channel, is given the P-18MA/P-180U radar press, Ukrspetsexport SSR (Primary and as 5,000 hours. system, which is also used (the only institution Secondary Surveillance by the Ukrainian Armed authorized by the Radar) system. The The ground-based VHF Forces, could detect the Ukrainian Government to combined use of primary (metric band) P-180U F-117A Nighthawk Stealth fulfill the export potential and secondary channels (P-18MA) is a long- Fighter from 61km. of Ukraine's military- considerably increases range surveillance radar industrial complex), a the detection range and which provides the radar There are different subsidiary of the Ukrainian accuracy of finding the information and flight speculations regarding state-owned defense coordinates of aerial routes of aerial objects. the procurement company UkroBoronProm objects. Additionally, the The solid-state P-180U of the MARS-L and (UOP), delivered two availability of additional is the modernized and P-180U radars, which P-180U and two MARS-L aircraft information improved version of are considered to be radars to SSTEK Defense such as current altitude, the VHF-Band 2D (two- capable of detecting Industry Technologies in remaining fuel, condition dimensional, provides only stealth aircraft as they late December 2019, under of the onboard systems, azimuth and range data) operate on the L and VHF a contract worth US$11,144 etc., together with P-18 early warning radar bands, by SSTEK Defense million. According to the primary radar information, developed during the Industry Technologies, reports, the total cost of significantly increases Soviet Union. -

China's Strategic Modernization: Implications for the United States
CHINA’S STRATEGIC MODERNIZATION: IMPLICATIONS FOR THE UNITED STATES Mark A. Stokes September 1999 ***** The views expressed in this report are those of the author and do not necessarily reflect the official policy or position of the Department of the Army, the Department of the Air Force, the Department of Defense, or the U.S. Government. This report is cleared for public release; distribution is unlimited. ***** Comments pertaining to this report are invited and should be forwarded to: Director, Strategic Studies Institute, U.S. Army War College, 122 Forbes Ave., Carlisle, PA 17013-5244. Copies of this report may be obtained from the Publications and Production Office by calling commercial (717) 245-4133, FAX (717) 245-3820, or via the Internet at [email protected] ***** Selected 1993, 1994, and all later Strategic Studies Institute (SSI) monographs are available on the SSI Homepage for electronic dissemination. SSI’s Homepage address is: http://carlisle-www.army. mil/usassi/welcome.htm ***** The Strategic Studies Institute publishes a monthly e-mail newsletter to update the national security community on the research of our analysts, recent and forthcoming publications, and upcoming conferences sponsored by the Institute. Each newsletter also provides a strategic commentary by one of our research analysts. If you are interested in receiving this newsletter, please let us know by e-mail at [email protected] or by calling (717) 245-3133. ISBN 1-58487-004-4 ii CONTENTS Foreword .......................................v 1. Introduction ...................................1 2. Foundations of Strategic Modernization ............5 3. China’s Quest for Information Dominance ......... 25 4. -

Calibration of Multilateration Positioning Systems Via Nonlinear Optimization
DEGREE PROJECT, IN OPTIMIZATION AND SYSTEMS THEORY , SECOND LEVEL STOCKHOLM, SWEDEN 2015 Calibration of Multilateration Positioning Systems via Nonlinear Optimization SEBASTIAN BREMBERG KTH ROYAL INSTITUTE OF TECHNOLOGY SCI SCHOOL OF ENGINEERING SCIENCES Calibration of Multilateration Positioning Systems via Nonlinear Optimization SEBASTIAN BREMBERG Master’s Thesis in Optimization and Systems Theory (30 ECTS credits) Master Programme in Applied and Computational Mathematics (120 credits) Royal Institute of Technology year 2015 Supervisor at Ericsson: Daniel Henriksson Supervisor at KTH: Johan Karlsson Examiner: Johan Karlsson TRITA-MAT-E 2015:62 ISRN-KTH/MAT/E--15/62--SE Royal Institute of Technology SCI School of Engineering Sciences KTH SCI SE-100 44 Stockholm, Sweden URL: www.kth.se/sci Kalibrering av System f¨or Multilaterations Positionerssystem genom Icke-linj¨ar Optimering ” Sammanfattning I denna masteruppsats utv¨arderas en metod syftande till att f¨orb¨attra noggran- nheten i den funktion som positionerar sensorer i ett tr˚adl¨ost transmissionsn¨atverk. Den positioneringsmetod som har legat till grund f¨or analysen ¨ar TDOA (Time Dif- ference of Arrival), en multilaterations-teknik som baseras p˚am¨atning av tidsskillnaden av en radiosignal fr˚an tv˚arumsligt separerade och synkrona transmittorer till en mottagande sensor. Metoden syftar till att reducera positioneringsfel som orsakats av att de ursprungliga positionsangivelserna varit felaktiga samt synkroniserings- fel i n¨atet. F¨or rekalibrering av transmissionsn¨atet anv¨ands redan k¨anda sensor- positioner. Detta uppn˚as genom minimering av skillnaden mellan signalbaserade TDOA-m¨atningar fr˚an systemet och uppskattade TDOA-m˚att vilka erh˚allits genom ber¨akningar av en given sensorposition baserat p˚aoptimering via en ickelinj¨ar minstakvadratanpassning. -
Bistatic Radar with Thinned Receiving Phased Array for Airports Surveillance
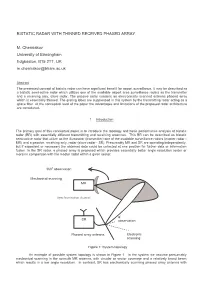
BISTATIC RADAR WITH THINNED RECEIVED PHASED ARRAY M. Cherniakov University of Birmingham Edgbaston, B15 2TT, UK [email protected] Abstract The presented concept of bistatic radar can have significant benefit for airport surveillance. It may be described as a bistatic semi-active radar which utilizes one of the available airport area surveillance radars as the transmitter and a receiving only, slave radar. The passive radar contains an electronically scanned antenna phased array which is essentially thinned. The grating lobes are suppressed in this system by the transmitting radar acting as a space filter. At the conceptual level of the paper the advantages and limitations of the proposed radar architecture are considered. 1 Introduction The primary goal of this conceptual paper is to introduce the topology and basic performance analysis of bistatic radar (BR) with essentially different transmitting and receiving antennas. This BR can be described as bistatic semi-active radar that utilize as the illuminator (transmitter) one of the available surveillance radars (master radar - MR) and a passive, receiving only, radar (slave radar - SR). Presumably MR and SR are operating independently, but if expedient or necessary the obtained data could be collected at one position for further data or information fusion. In the SR radar, a phased array is proposed which provides essentially better angle resolution (order or more) in comparison with the master radar within a given sector. 360 0 observation Mechanical scanning MR Synchronization channel :0 SR observation Phased array antenna Electronic scanning Figure 1: System topology An example of possible system topology is shown in Figure 1. -

GNSS Based Passive Radar for UAV Monitoring
GNSS Based Passive Radar for UAV Monitoring Christos V. Ilioudis, Jianlin Cao, Ilias Theodorou, Pasquale Striano William Coventry, Carmine Clemente and John Soraghan Department of Electronic and Electrical Engineering University of Strathclyde Glasgow, UK Email: fc.ilioudis, jianlin.cao, ilias.theodorou, pasquale.striano, william.coventry, carmine.clemente, [email protected] Abstract—Monitoring of unmanned aerial vehicle (UAV) tar- helicopter targets when operating in near FSR configuration. gets has been a subject of great importance in both defence Moreover, in [7] the Doppler information extraction in a GNSS and security sectors. In this paper a novel system is introduced based FSR was validated, while the authors in [8] suggested a based on a passive bistatic radar using Global Navigation Satellite Systems (GNSS) as illuminators of opportunity. Particularly, a filter bank based algorithm that is able to estimate range and link budget analysis is held to determine the capabilities and velocity parameters of the moving target. limitations of such a system. Additionally, a signal reconstruction In [9] a GNSS based PBR was proposed for synthetic algorithm is provided allowing estimation of the transmitted aperture radar (SAR) applications using a synchronization signal from each satellite. Finally, the proposed system is tested algorithm to generate the reference, satellite, signal at the in outdoor acquisitions of small UAV targets where the Fractional Fourier Transform (FrFT) is used as tool to enhance target receiver. Based on the same principles, the authors in [10] detectability. proposed and experimentally validated a GNSS PBR system Index Terms—GNSS, Passive Radar, UAV, Forward Scattering design for maritime target detection. -

Development of Passive Bistatic Radars Based on Orthogonal Frequency-Division Multiplexing Modulated Signals for Short and Medium Range Surveillance
Development of Passive Bistatic Radars based on Orthogonal Frequency-Division Multiplexing modulated signals for short and medium range surveillance Facoltà di Ingegneria dell’Informazione, Informatica e Statistica Dottorato di Ricerca in Telerilevamento XXVIII Ciclo Candidato Claudio Palmarini 1151374 Tutor Prof. Pierfrancesco Lombardo 2 INDEX 1 Introduction ................................................................................................................................................................ 5 2 Exploited signals of opportunity ................................................................................................................................. 7 2.1 OFDM Modulation............................................................................................................................................. 7 2.2 DVB-T signal characteristics .............................................................................................................................. 8 2.3 DAB signal characteristics ............................................................................................................................... 12 2.3.1 DAB in Italy .................................................................................................................................................. 14 2.4 OFDM Modulated signals as opportunity signals ............................................................................................ 16 3 DVB-T based PBR ..................................................................................................................................................... -

Experimental Verification of the Concept of Using LOFAR Radio
sensors Article Experimental Verification of the Concept of Using LOFAR Radio-Telescopes as Receivers in Passive Radiolocation Systems † Julia Kłos 1, Konrad J˛edrzejewski 1,* , Aleksander Droszcz 1, Krzysztof Kulpa 1 , Mariusz Pozoga˙ 2 and Jacek Misiurewicz 1 1 Institute of Electronic Systems, Faculty of Electronics and Information Technology, Warsaw University of Technology, Nowowiejska 15/19, 00-665 Warsaw, Poland; [email protected] (J.K.); [email protected] (A.D.); [email protected] (K.K.); [email protected] (J.M.) 2 Space Research Centre Polish Academy of Science, Bartycka 18A, 00-716 Warsaw, Poland; [email protected] * Correspondence: [email protected]; Tel.: +48-22-234-5883 † This paper is an extended version of the paper published in the 2020 21st International Radar Symposium (IRS). Abstract: The paper presents a new idea of using a low-frequency radio-telescope belonging to the LO- FAR network as a receiver in a passive radar system. The structure of a LOFAR radio-telescope station is described in the context of applying this radio-telescope for detection of aerial (airplanes) and space (satellite) targets. The theoretical considerations and description of the proposed signal processing schema for the passive radar based on a LOFAR radio-telescope are outlined in the paper. The results of initial experiments verifying the concept of a LOFAR station use as a receiver and Citation: Kłos, J.; J˛edrzejewski,K.; a commercial digital radio broadcasting (DAB) transmitters as illuminators of opportunity for aerial Droszcz, A.; Kulpa, K.; Pozoga,˙ M.; object detection are presented. -

Passive Forward-Scattering Radar Using Digital Video Broadcasting Satellite Signal for Drone Detection
remote sensing Article Passive Forward-Scattering Radar Using Digital Video Broadcasting Satellite Signal for Drone Detection Raja Syamsul Azmir Raja Abdullah 1,* , Surajo Alhaji Musa 1,2, Nur Emileen Abdul Rashid 3, Aduwati Sali 1, Asem Ahmad Salah 4 and Alyani Ismail 1 1 Wireless and Photonics Networks (WIPNET), Department of Computer and Communication System Engineering, University Putra Malaysia (UPM), Serdang 43400, Malaysia; [email protected] (S.A.M.); [email protected] (A.S.); [email protected] (A.I.) 2 Computer Engineering Department, Institute of Information Technology, Kazaure 3002, Jigawa, Nigeria 3 Microwave Research Institute, University Teknologi MARA, Shah Alam 40450, Selangor, Malaysia; [email protected] 4 Department of Computer System Engineering, Faculty of Engineering and Information Technology, Arab American University, Jenin 44862, West Bank, Palestine; [email protected] * Correspondence: [email protected] Received: 4 July 2020; Accepted: 23 August 2020; Published: 19 September 2020 Abstract: This paper presents a passive radar system using a signal of opportunity from Digital Video Broadcasting Satellite (DVB-S). The ultimate purpose of the system is to be used as an air traffic monitoring and surveillance system. However, the work focuses on drone detection as a proof of the concept. Detecting a drone by using satellite-based passive radar possess inherent challenges, such as the small radar cross section and low speed. Therefore, this paper proposes a unique method by leveraging the advantage of forward-scattering radar (FSR) topology and characteristics to detect a drone; in other words, the system is known as a passive FSR (p-FSR) system.