IAR C/C++ Development Guide Compiling and Linking for Arm Limited’S Arm® Cores
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Introduction to Computer Systems 15-213/18-243, Spring 2009 1St
M4-L3: Executables CSE351, Winter 2021 Executables CSE 351 Winter 2021 Instructor: Teaching Assistants: Mark Wyse Kyrie Dowling Catherine Guevara Ian Hsiao Jim Limprasert Armin Magness Allie Pfleger Cosmo Wang Ronald Widjaja http://xkcd.com/1790/ M4-L3: Executables CSE351, Winter 2021 Administrivia ❖ Lab 2 due Monday (2/8) ❖ hw12 due Friday ❖ hw13 due next Wednesday (2/10) ▪ Based on the next two lectures, longer than normal ❖ Remember: HW and readings due before lecture, at 11am PST on due date 2 M4-L3: Executables CSE351, Winter 2021 Roadmap C: Java: Memory & data car *c = malloc(sizeof(car)); Car c = new Car(); Integers & floats c->miles = 100; c.setMiles(100); x86 assembly c->gals = 17; c.setGals(17); Procedures & stacks float mpg = get_mpg(c); float mpg = Executables free(c); c.getMPG(); Arrays & structs Memory & caches Assembly get_mpg: Processes pushq %rbp language: movq %rsp, %rbp Virtual memory ... Memory allocation popq %rbp Java vs. C ret OS: Machine 0111010000011000 100011010000010000000010 code: 1000100111000010 110000011111101000011111 Computer system: 3 M4-L3: Executables CSE351, Winter 2021 Reading Review ❖ Terminology: ▪ CALL: compiler, assembler, linker, loader ▪ Object file: symbol table, relocation table ▪ Disassembly ▪ Multidimensional arrays, row-major ordering ▪ Multilevel arrays ❖ Questions from the Reading? ▪ also post to Ed post! 4 M4-L3: Executables CSE351, Winter 2021 Building an Executable from a C File ❖ Code in files p1.c p2.c ❖ Compile with command: gcc -Og p1.c p2.c -o p ▪ Put resulting machine code in -

CERES Software Bulletin 95-12
CERES Software Bulletin 95-12 Fortran 90 Linking Experiences, September 5, 1995 1.0 Purpose: To disseminate experience gained in the process of linking Fortran 90 software with library routines compiled under Fortran 77 compiler. 2.0 Originator: Lyle Ziegelmiller ([email protected]) 3.0 Description: One of the summer students, Julia Barsie, was working with a plot program which was written in f77. This program called routines from a graphics package known as NCAR, which is also written in f77. Everything was fine. The plot program was converted to f90, and a new version of the NCAR graphical package was released, which was written in f77. A problem arose when trying to link the new f90 version of the plot program with the new f77 release of NCAR; many undefined references were reported by the linker. This bulletin is intended to convey what was learned in the effort to accomplish this linking. The first step I took was to issue the "-dryrun" directive to the f77 compiler when using it to compile the original f77 plot program and the original NCAR graphics library. "- dryrun" causes the linker to produce an output detailing all the various libraries that it links with. Note that these libaries are in addition to the libaries you would select on the command line. For example, you might compile a program with erbelib, but the linker would have to link with librarie(s) that contain the definitions of sine or cosine. Anyway, it was my hypothesis that if everything compiled and linked with f77, then all the libraries must be contained in the output from the f77's "-dryrun" command. -
Linking + Libraries
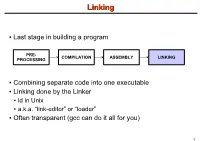
LinkingLinking ● Last stage in building a program PRE- COMPILATION ASSEMBLY LINKING PROCESSING ● Combining separate code into one executable ● Linking done by the Linker ● ld in Unix ● a.k.a. “link-editor” or “loader” ● Often transparent (gcc can do it all for you) 1 LinkingLinking involves...involves... ● Combining several object modules (the .o files corresponding to .c files) into one file ● Resolving external references to variables and functions ● Producing an executable file (if no errors) file1.c file1.o file2.c gcc file2.o Linker Executable fileN.c fileN.o Header files External references 2 LinkingLinking withwith ExternalExternal ReferencesReferences file1.c file2.c int count; #include <stdio.h> void display(void); Compiler extern int count; int main(void) void display(void) { file1.o file2.o { count = 10; with placeholders printf(“%d”,count); display(); } return 0; Linker } ● file1.o has placeholder for display() ● file2.o has placeholder for count ● object modules are relocatable ● addresses are relative offsets from top of file 3 LibrariesLibraries ● Definition: ● a file containing functions that can be referenced externally by a C program ● Purpose: ● easy access to functions used repeatedly ● promote code modularity and re-use ● reduce source and executable file size 4 LibrariesLibraries ● Static (Archive) ● libname.a on Unix; name.lib on DOS/Windows ● Only modules with referenced code linked when compiling ● unlike .o files ● Linker copies function from library into executable file ● Update to library requires recompiling program 5 LibrariesLibraries ● Dynamic (Shared Object or Dynamic Link Library) ● libname.so on Unix; name.dll on DOS/Windows ● Referenced code not copied into executable ● Loaded in memory at run time ● Smaller executable size ● Can update library without recompiling program ● Drawback: slightly slower program startup 6 LibrariesLibraries ● Linking a static library libpepsi.a /* crave source file */ … gcc .. -

Using the DLFM Package on the Cray XE6 System
Using the DLFM Package on the Cray XE6 System Mike Davis, Cray Inc. Version 1.4 - October 2013 1.0: Introduction The DLFM package is a set of libraries and tools that can be applied to a dynamically-linked application, or an application that uses Python, to provide improved performance during the loading of dynamic libraries and importing of Python modules when running the application at large scale. Included in the DLFM package are: a set of wrapper functions that interface with the dynamic linker (ld.so) to cache the application's dynamic library load operations; and a custom libpython.so, with a set of optimized components, that caches the application's Python import operations. 2.0: Dynamic Linking and Python Importing Without DLFM When a dynamically-linked application is executed, the set of dependent libraries is loaded in sequence by ld.so prior to the transfer of control to the application's main function. This set of dependent libraries ordinarily numbers a dozen or so, but can number many more, depending on the needs of the application; their names and paths are given by the ldd(1) command. As ld.so processes each dependent library, it executes a series of system calls to find the library and make the library's contents available to the application. These include: fd = open (/path/to/dependent/library, O_RDONLY); read (fd, elfhdr, 832); // to get the library ELF header fstat (fd, &stbuf); // to get library attributes, such as size mmap (buf, length, prot, MAP_PRIVATE, fd, offset); // read text segment mmap (buf, length, prot, MAP_PRIVATE, fd, offset); // read data segment close (fd); The number of open() calls can be many times larger than the number of dependent libraries, because ld.so must search for each dependent library in multiple locations, as described on the ld.so(1) man page. -

IAR Systems Brings Functional Safety Tools to RISC-V with Certification for IEC 61508 and ISO 26262
Press release Date: October 20, 2020 IAR Systems brings functional safety tools to RISC-V with certification for IEC 61508 and ISO 26262 Stockholm, Sweden—October 20, 2020— IAR Systems®, the future-proof supplier of software tools and services for embedded development, further extends its strong tools offering for RISC-V by announcing a certified version of its development tools. The functional safety edition of IAR Embedded Workbench® for RISC-V will be certified by TÜV SÜD according to the requirements of IEC 61508, the international umbrella standard for functional safety, as well as ISO 26262, which is used for automotive safety-related systems. In addition, the certification covers the international standard IEC 62304, which specifies life cycle requirements for the development of medical software and software within medical devices, and the European railway standards EN 50128 and EN 50657. “We are seeing RISC-V becoming an important architecture not only in broad designs, but specifically in automotive applications,” said Stefan Skarin, CEO, IAR Systems. “By providing our development tools with certification according to ISO 26262, we enable the RISC-V community to further expand and more rapidly bring functional safety designs to the market. As a commercial tools vendor, we are able to provide global technical support as well as invest in keeping our products robust, maintained and qualified. Our certified tools will enable our customers to speed up the path to using RISC-V in safety-critical applications within automotive and other areas.” “We see a strong demand for RISC-V with safety among our customers, and the certification of IAR Embedded Workbench for RISC-V aligns perfectly with that demand,” said Frankwell Lin, President, Andes Technology. -

IAR Systems Supports New Amazon Web Services Iot Microcontroller Operating System Amazon Freertos at Launch
Press release Date: November 30, 2017 IAR Systems supports new Amazon Web Services IoT Microcontroller Operating System Amazon FreeRTOS at Launch Amazon FreeRTOS will be supported by the leading embedded development toolchain IAR Embedded Workbench Uppsala, Sweden—November 30, 2017—IAR Systems®, a leading supplier of software tools and services for embedded development, announces support for newly launched Internet of Things (IoT) Microcontroller Operating System, Amazon FreeRTOS. Together with Amazon Web Services (AWS), IAR Systems provides developers with easy access to high-performance, pre-integrated development tools for developing and debugging embedded and IoT-connected applications based on Amazon FreeRTOS. Amazon FreeRTOS provides tools that developers need to quickly and easily deploy a microcontroller- based connected device and develop an embedded or IoT application without having to worry about the complexity of scaling across millions of devices. Based on the FreeRTOS kernel, Amazon FreeRTOS includes software libraries which make it easy to securely connect devices locally to AWS Greengrass, directly to the cloud, and update them remotely. For new devices, developers can choose to build their embedded and IoT application on a variety of qualified microcontrollers from companies collaborating with AWS and IAR Systems, including Microchip, NXP, STMicroelectronics and Texas Instruments. Since 1983, IAR Systems’ solutions have ensured quality, reliability and efficiency in the development of over one million embedded applications. Now available for Amazon FreeRTOS users, development tools from IAR Systems deliver leading code optimizations and extensive debugging functionality. The technology is coupled with professional technical support offered globally. “AWS is pleased to be teamed with IAR Systems to provide developers with access to a high performance, pre-integrated set of development tools for developing and debugging connected applications,” says Richard Barry, Principal Engineer, Amazon Web Services, Inc. -

Environment Variable and Set-UID Program Lab 1
SEED Labs – Environment Variable and Set-UID Program Lab 1 Environment Variable and Set-UID Program Lab Copyright © 2006 - 2016 Wenliang Du, All rights reserved. Free to use for non-commercial educational purposes. Commercial uses of the materials are prohibited. The SEED project was funded by multiple grants from the US National Science Foundation. 1 Overview The learning objective of this lab is for students to understand how environment variables affect program and system behaviors. Environment variables are a set of dynamic named values that can affect the way running processes will behave on a computer. They are used by most operating systems, since they were introduced to Unix in 1979. Although environment variables affect program behaviors, how they achieve that is not well understood by many programmers. As a result, if a program uses environment variables, but the programmer does not know that they are used, the program may have vulnerabilities. In this lab, students will understand how environment variables work, how they are propagated from parent process to child, and how they affect system/program behaviors. We are particularly interested in how environment variables affect the behavior of Set-UID programs, which are usually privileged programs. This lab covers the following topics: • Environment variables • Set-UID programs • Securely invoke external programs • Capability leaking • Dynamic loader/linker Readings and videos. Detailed coverage of the Set-UID mechanism, environment variables, and their related security problems can be found in the following: • Chapters 1 and 2 of the SEED Book, Computer & Internet Security: A Hands-on Approach, 2nd Edition, by Wenliang Du. -

CS 110 Discussion 15 Programming with SIMD Intrinsics
CS 110 Discussion 15 Programming with SIMD Intrinsics Yanjie Song School of Information Science and Technology May 7, 2020 Yanjie Song (S.I.S.T.) CS 110 Discussion 15 2020.05.07 1 / 21 Table of Contents 1 Introduction on Intrinsics 2 Compiler and SIMD Intrinsics 3 Intel(R) SDE 4 Application: Horizontal sum in vector Yanjie Song (S.I.S.T.) CS 110 Discussion 15 2020.05.07 2 / 21 Table of Contents 1 Introduction on Intrinsics 2 Compiler and SIMD Intrinsics 3 Intel(R) SDE 4 Application: Horizontal sum in vector Yanjie Song (S.I.S.T.) CS 110 Discussion 15 2020.05.07 3 / 21 Introduction on Intrinsics Definition In computer software, in compiler theory, an intrinsic function (or builtin function) is a function (subroutine) available for use in a given programming language whose implementation is handled specially by the compiler. Yanjie Song (S.I.S.T.) CS 110 Discussion 15 2020.05.07 4 / 21 Intrinsics in C/C++ Compilers for C and C++, of Microsoft, Intel, and the GNU Compiler Collection (GCC) implement intrinsics that map directly to the x86 single instruction, multiple data (SIMD) instructions (MMX, Streaming SIMD Extensions (SSE), SSE2, SSE3, SSSE3, SSE4). Yanjie Song (S.I.S.T.) CS 110 Discussion 15 2020.05.07 5 / 21 x86 SIMD instruction set extensions MMX (1996, 64 bits) 3DNow! (1998) Streaming SIMD Extensions (SSE, 1999, 128 bits) SSE2 (2001) SSE3 (2004) SSSE3 (2006) SSE4 (2006) Advanced Vector eXtensions (AVX, 2008, 256 bits) AVX2 (2013) F16C (2009) XOP (2009) FMA FMA4 (2011) FMA3 (2012) AVX-512 (2015, 512 bits) Yanjie Song (S.I.S.T.) CS 110 Discussion 15 2020.05.07 6 / 21 SIMD extensions in other ISAs There are SIMD instructions for other ISAs as well, e.g. -

PGI Compilers
USER'S GUIDE FOR X86-64 CPUS Version 2019 TABLE OF CONTENTS Preface............................................................................................................ xii Audience Description......................................................................................... xii Compatibility and Conformance to Standards............................................................xii Organization................................................................................................... xiii Hardware and Software Constraints.......................................................................xiv Conventions.................................................................................................... xiv Terms............................................................................................................ xv Related Publications.........................................................................................xvii Chapter 1. Getting Started.....................................................................................1 1.1. Overview................................................................................................... 1 1.2. Creating an Example..................................................................................... 2 1.3. Invoking the Command-level PGI Compilers......................................................... 2 1.3.1. Command-line Syntax...............................................................................2 1.3.2. Command-line Options............................................................................ -
Chapter 6: the Linker
6. The Linker 6-1 Chapter 6: The Linker References: • Brian W. Kernighan / Dennis M. Ritchie: The C Programming Language, 2nd Ed. Prentice-Hall, 1988. • Samuel P. Harbison / Guy L. Steele Jr.: C — A Reference Manual, 4th Ed. Prentice-Hall, 1995. • Online Documentation of Microsoft Visual C++ 6.0 (Standard Edition): MSDN Library: Visual Studio 6.0 release. • Horst Wettstein: Assemblierer und Binder (in German). Carl Hanser Verlag, 1979. • Peter Rechenberg, Gustav Pomberger (Eds.): Informatik-Handbuch (in German). Carl Hanser Verlag, 1997. Kapitel 12: Systemsoftware (H. M¨ossenb¨ock). Stefan Brass: Computer Science III Universit¨atGiessen, 2001 6. The Linker 6-2 Overview ' $ 1. Introduction (Overview) & % 2. Object Files, Libraries, and the Linker 3. Make 4. Dynamic Linking Stefan Brass: Computer Science III Universit¨atGiessen, 2001 6. The Linker 6-3 Introduction (1) • Often, a program consists of several modules which are separately compiled. Reasons are: The program is large. Even with fast computers, editing and compiling a single file with a million lines leads to unnecessary delays. The program is developed by several people. Different programmers cannot easily edit the same file at the same time. (There is software for collaborative work that permits that, but it is still a research topic.) A large program is easier to understand if it is divided into natural units. E.g. each module defines one data type with its operations. Stefan Brass: Computer Science III Universit¨atGiessen, 2001 6. The Linker 6-4 Introduction (2) • Reasons for splitting a program into several source files (continued): The same module might be used in different pro- grams (e.g. -

Intel Hardware Intrinsics in .NET Core
Han Lee, Intel Corporation [email protected] Notices and Disclaimers No license (express or implied, by estoppel or otherwise) to any intellectual property rights is granted by this document. Intel disclaims all express and implied warranties, including without limitation, the implied warranties of merchantability, fitness for a particular purpose, and non-infringement, as well as any warranty arising from course of performance, course of dealing, or usage in trade. This document contains information on products, services and/or processes in development. All information provided here is subject to change without notice. Contact your Intel representative to obtain the latest forecast, schedule, specifications and roadmaps. Intel technologies’ features and benefits depend on system configuration and may require enabled hardware, software or service activation. Learn more at intel.com, or from the OEM or retailer. The products and services described may contain defects or errors known as errata which may cause deviations from published specifications. Current characterized errata are available on request. No product or component can be absolutely secure. Copies of documents which have an order number and are referenced in this document may be obtained by calling 1-800-548- 4725 or by visiting www.intel.com/design/literature.htm. Intel, the Intel logo, and other Intel product and solution names in this presentation are trademarks of Intel *Other names and brands may be claimed as the property of others © Intel Corporation. 2 What Do These Have in Common? Domain Example Image processing Color extraction High performance computing (HPC) Matrix multiplication Data processing Hamming code Text processing UTF-8 conversion Data structures Bit array Machine learning Classification For performance sensitive code, consider using Intel® hardware intrinsics 3 Objectives . -
IAR Embedded Workbench® for ARM
IAR Embedded Workbench® for ARM IAR Embedded Workbench is a set of highly sophisticated • Binary compatibility with other EABI compliant tools and easy-to-use development tools for embedded applica- • Automatic checking of MISRA C rules (MISRA C:2004) tions. It integrates the IAR C/C++ Compiler™, assembler, • Language extensions for embedded applications with linker, librarian, text editor, project manager, and C-SPY® target-speciic support Debugger in an integrated development environment • Advanced inline assembler • Support for ARM, Thumb1 and Thumb-2 processor modes (IDE). With its built-in chip-specific code optimizer, IAR • Support for the VFP9-S loating-point co-processor Embedded Workbench generates very efficient and reliable • Support for 4 Gbyte applications in all processor modes code for ARM devices. In addition to this solid technology, • Support for 64-bit long long IAR Systems also provides professional worldwide technical • 32- and 64-bit loating-point types in standard IEEE format support. • Reentrant code • Position Independent Code and Data (PIC/PID) MODULAR AND EXTENSIBLE IDE • Multiple levels of optimizations on code size and execution • A seamlessly integrated environment for building and speed allowing different transformations enabled, such as debugging embedded applications function inlining, loop unrolling etc. • Powerful project management allowing multiple projects in one workspace STATE-OF-THE-ART C-SPY® DEBUGGER • Build integration with IAR visualSTATE • Complex code and data breakpoints • Hierarchical project