Autonomous Robotic Rescue Boat Showing How the Three Main Systems Interact with Each Other
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Commonwealth News Service
COMMONWEALTH 25 27 28 22 18 23 15 33 CNS National Pick Up 10 11 1,176 Stations 29 30 23 1 4 31 5 7 6 38 39 16 8 NEWS SERVICE 17 26 34 35 9 12 36 74 state/regional radio stations aired 19 32 14 20 21 CNS stories in 2005 13 37 24 1. WCDJ-FM (1) Allston 26. WMRC-AM (1) Milford 2. WMUA-FM, WFCR-FM (2) Amherst 27. WNAW-AM, WMNB-FM (2) North Adams 3. WPNI-AM, WRNX-FM (2) Amherst 28. WJDF-FM (1) Orange 4. Metro Networks, Boston 29. WBEC-AM/FM (2) Pittsfi eld 5. WAAF-FM, WEEI-AM, WRKO-AM, WVEI-AM, WQSX-FM (5) Boston 30. WBRK-AM/FM (2) Pittsfi eld 6. WBZ-AM, WBCN-FM, WODS-FM,WBMX-FM, WZLX-FM (5) Boston 31. WUHN-AM, WUPE-FM (2) Pittsfi eld 7. WERS-FM (1) Boston 32. WPRO-AM/FM, WSKO-AM, WWLI-FM (4) Providence 8. WVEI-AM, WEEI-AM (2) Boston/Worcestor 33. WESX-AM (1) Salem 9. WBET-AM (1) Brockton 34. WHMP-AM, WRSI-FM, WPVQ-FM, WAQY-FM, WHAI-FM, WLZX-FM 10. WMBR-FM (1) Cambridge (6) Springfi eld 11. WRCA-AM, WHRB-FM (2) Cambridge 35. WHYN-AM/FM, WNNZ-AM (3) Springfi eld 12. WHNP-AM (1) East Longmeadow 36. WPEP-AM (1) Taunton 13. WBSM-AM, WFHN-FM (2) Fairhaven 37. WNAN-AM, WCAI-FM (2) Woods Hole 14. WSAR-AM, WHTB-AM (2) Fall River 38. WORC-AM, WGFP-AM (2) Worcester 15. WEIM-AM (1) Fitchburg 39. -
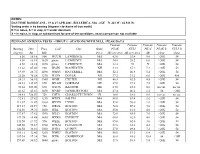
Daytime Bandscans
NOTES: DAYTIME BANDSCANS - 19 & 27 APR 2001 -BILLERICA, MA - (GC= 71.221 W / 42.533 N) Sorting order is by bearing (degrees clockwise of true north) N = in noise, S = in slop, U = under dominant X = in noise, in slop, or subdominant for one of the conditions, exact comparison not available PENNANT ANTENNA TESTS - GROUP 1 - STATIONS WITH NULL / PEAK DATA Pennant Pennant Pennant Pennant Pennant Bearing Dist. Freq. Call City State/ PEAK NULL PK-N PEAK R NULL R degrees km kHz Prov. dB over zero dB over zero dB ohms ohms 8.56 16.18 800 WCCM LAWRENCE MA 63.0 53.4 9.6 >20K 54 8.56 16.18 1620 pirate LAWRENCE MA 34.8 28.2 6.6 >20K 54 8.56 16.18 1670 pirate LAWRENCE MA 22.8 N X >20K 54 14.62 87.04 930 WGIN ROCHESTER NH 44.4 37.2 7.2 >20K 54 19.89 28.72 1490 WHAV HAVERHILL MA 52.2 46.8 5.4 >20K 54 22.20 78.58 1270 WTSN DOVER NH 37.2 31.2 6.0 >20K 486 24.21 56.10 1540 WGIP EXETER NH 46.8 42.0 4.8 >20K 54 24.81 139.07 870 WLAM GORHAM ME 27.0 19.2 7.8 >20K 54 36.61 322.00 620 WZON BANGOR ME 24.0 24.0 0.0 no var. no var. 41.83 43.83 1450 WNBP NEWBURYPORT MA 47.4 46.2 1.2 54 >20K 54.81 758.59 720 CHTN CHARLOTTETOWN PI 18.0 18.0 0.0 no var. -

Beacon Hill Seeks Ban on All Hand-Held Cell Phone Use While Driving
VOL. 116 - NO. 7 BOSTON, MASSACHUSETTS, FEBRUARY 17, 2012 $.30 A COPY BEACON HILL SEEKS BAN ON ALL Presidents’ Day HAND-HELD CELL PHONE USE WHILE DRIVING Observed February 20, 2012 by Sal Giarratani Remember these men as you enjoy the holiday rest area to use his or her phone. Said Wagner, “It’s a common sense measure. I think it will save lives; I think it will improve public safety ... I think it is a mea- sure which is long overdue.” The whole debate between hands-free and hand-held cell phone use while driving is so comical, isn’t it? Scientific test results show that there is little if any difference when it comes to distracted driving over what kind of cell phones are being used. The distraction isn’t in the hands but in the head. When using a cell phone, it The nanny staters are back again. The is the mind that gets distracted and the Legislature’s Joint Transportation Commit- response time it takes from the brain to the tee unanimously approved a bill to ban hand. When someone is in conversation, drivers from using hand-held cell phones. it always takes your focus off the road even Senator Mark Montigny, (D-New Bedford) is if your eyes are glued to the road. Bluetooths the bill’s Senate sponsor and recently stated, are no different to my handheld Samsung Abraham Lincoln George Washington “If (the hand-held ban) is an inconvenience or a cup of coffee which is often in my right- 1809 - 1865 1732 - 1799 for people, tough. -

Is Excited to Feature a Diverse Slate of Over 50 Speakers for the 2020 AMS
The Student Conference Planning Committee (SCPC) is excited to feature a diverse slate of over 50 speakers for the 2020 AMS Student Conference! We are grateful that our speakers provided biographical sketches before the conference. Please take advantage of these biographies to learn more about our speakers and think about which sessions you’d like to attend in Boston. Gaige Kerr, Kenzie Krocak, and Matt Flournoy 2020 Student Conference Chairpersons Dr. Sean Arms: Sean Arms is a Software Engineer at the NSF funded Unidata Program Center, one of the University Corporation for Atmospheric Research (UCAR)'s Community Programs (UCP). Born and raised in the rural karstlands of southern Indiana, Sean’s interest in meteorology began before he was even in kindergarten. However, it was in the 8th grade that he learned that there was this thing called “college” where he could learn all about the science behind the weather. After graduating high school in the year 2000, he packed up and headed west to the University of Oklahoma, where he earned his BS (2004), MS (2006), and, eventually, PhD (2014). His studies at OU were focused on observational boundary layer meteorology (the “lesser whirls”, if you will), and often involved deploying various types of instrumentation. During his time at OU, he was a TA for the junior level Meteorological Measurements course for multiple semesters, and taught the full course in his final fall semester on campus. With his incredible advisor (Dr. Petra Klein) and one of his committee members (Dr. Alan Shapiro) leading the way, he prioritized getting undergraduate students “into the field” as part of the regular undergraduate curriculum. -

Licensing and Management System
Approved by OMB (Office of Management and Budget) 3060-0084 July 2019 (REFERENCE COPY - Not for submission) Noncommercial Broadcast Stations Biennial Ownership Report (FCC Form 323-E) File Number: 0000097332 Submit Date: 2020-01-14 FRN: 0014839302 Purpose: Noncommercial Broadcast Stations Biennial Ownership Report Status: Received Status Date: 01/14/2020 Filing Status: Active Section I - General Information 1. Respondent FRN Entity Name 0014839302 Horizon Christian Fellowship Street City (and Country if non U.S. State ("NA" if non-U.S. Zip Address address) address) Code Phone Email 356 Broad Fitchburg MA 01420 +1 (978) 665- debbie@renewfm. Street 9111 org 2. Contact Name Organization Representative Deborah Jean Smith Horizon Christian Fellowship RENEW FM Zip Street Address City (and Country if non U.S. address) State Code Phone Email 356 Broad Fitchburg MA 01420 +1 (978) 665-9111 [email protected] Street Not Applicable 3. Application Filing Fee 4. Control of (a) Provide the following information about the Respondent: Respondent Relationship to stations/permits Licensee Is the Respondent's governing board (or other governing entity) directly or No indirectly under the control of another entity? (b) Provide the following information about this report: Purpose Biennial "As of" date 10/01/2019 When filing a biennial ownership report or validating and resubmitting a prior biennial ownership report, this date must be Oct. 1 of the year in which this report is filed. 5. Licensee(s) and Station(s) Respondent is filing this report to cover the following Licensee(s) and station(s): Licensee/Permittee Name FRN Horizon Christian Fellowship 0014839302 Fac. -
Broadcasting Telecasting
YEAR 101RN NOSI1)6 COLLEIih 26TH LIBRARY énoux CITY IOWA BROADCASTING TELECASTING THE BUSINESSWEEKLY OF RADIO AND TELEVISION APRIL 1, 1957 350 PER COPY c < .$'- Ki Ti3dddSIA3N Military zeros in on vhf channels 2 -6 Page 31 e&ol 9 A3I3 It's time to talk money with ASCAP again Page 42 'mars :.IE.iC! I ri Government sues Loew's for block booking Page 46 a2aTioO aFiE$r:i:;ao3 NARTB previews: What's on tap in Chicago Page 79 P N PO NT POW E R GETS BEST R E SULTS Radio Station W -I -T -H "pin point power" is tailor -made to blanket Baltimore's 15 -mile radius at low, low rates -with no waste coverage. W -I -T -H reaches 74% * of all Baltimore homes every week -delivers more listeners per dollar than any competitor. That's why we have twice as many advertisers as any competitor. That's why we're sure to hit the sales "bull's -eye" for you, too. 'Cumulative Pulse Audience Survey Buy Tom Tinsley President R. C. Embry Vice Pres. C O I N I F I I D E I N I C E National Representatives: Select Station Representatives in New York, Philadelphia, Baltimore, Washington. Forloe & Co. in Chicago, Seattle, San Francisco, Los Angeles, Dallas, Atlanta. RELAX and PLAY on a Remleee4#01%,/ You fly to Bermuda In less than 4 hours! FACELIFT FOR STATION WHTN-TV rebuilding to keep pace with the increasing importance of Central Ohio Valley . expanding to serve the needs of America's fastest growing industrial area better! Draw on this Powerhouse When OPERATION 'FACELIFT is completed this Spring, Station WNTN -TV's 316,000 watts will pour out of an antenna of Facts for your Slogan: 1000 feet above the average terrain! This means . -

Return Of,Organization Exempt from Income
Form 990 Return of,Organization Exempt From Income Tax Under section 501(c), 527, or 4947(a)(1) of the Internal Revenue Code (except black lung 2001 benefit trust or private foundation) Oepartment al the Treasury Open to Public Internal Revenue Semce The organization may have py of this return to sahsty, state reporting requirements A For the 2001 calendar OR tax year beginning JULY 1 2001 , and ending JUNE B Check d applicable C Name of organization D Employer identification number Please Address change use IRS 13-3002025 label or P mail is 0elrvereE address) Name change poor or Number and street (or O box if not to street I RooMsuite E Telephone number type Initial return Sea (212) 529-5300 Specific Final return or town State ZIP r q F Insuue City or country Accounting method Cash Accrual tons D I Amended return ANEW YORK NY E) Other (specify) F-JApplicaiion pending Section 501(c)(3) organizations and4947(a)(1) nonexempt charitable 1 and I are not applicable to section 527 organizations trusts must attach a completed Schedule A (Form 990 or 990-Q) H(a) Is this a group return for affiliates? 1:1 Yes ~ No H(b) If -Yes ." enter number of aFiliales H(t) Are all affiliates included? F-]YesFx-]No J Organization type (check only one) u501(c) ( 3 ) Insert no ) u4947(a)(1) or u527 (It 'No' attach a list Sea instructions ) H(d) Is this a separate return filed by an or ani K Check here ,1 organizations gross receipts are normally not mare Nan $25 000 E] Ne The zation covered by a group rulings ~ Yes El No organization need not file a return w+N -

Collicot Elementary School 80 Edge Hill Road, Milton, MA 02186
Milton Public Schools Elementary Parent/Guardian & Student Handbook 2011-2012 Collicot Elementary School 80 Edge Hill Road, Milton, MA 02186 Respect, Achievement, Citizenship Collicot Elementary School Message from the Principal: At the Collicot School there is a commitment to academic excellence and high standards for administrators, teachers, and students. The dedicated and creative Collicot teachers and staff are committed to maximizing the individual potential of each child. Through a wide variety of challenging activities and experiences, we strive to provide a strong academic foundation and a love of learning in a secure, safe, and stimulating environment that values individual differences. The Collicot School promotes Milton Public Schools’ core values: High Academic Achievement for All Excellence in the Classroom Collaborative Relationships and Communication Respect for Human Differences Risk Taking and Innovation for Education Family interest and involvement are at the foundation of the Collicot School’s success. We look forward to nurturing this relationship and to continuing this educational partnership. Table of Contents District Directory Page 3-6 Collicot Elementary School Procedures Pages Collicot School Hours, Early Arrival/ Extended Day Program, Arrival and Dismissal Procedures, Early 6-8 Dismissal, Late Student Pick-up Policy, Lunch Milton Public Schools Administrative Information Pages School Cancellations, Home/School Communication, Attendance, Residency, Birthdays, Homework 9-13 and Reading Policy, Family Educational -

Nutrition 116 Country Club Boulevard (508)853-6419 Office at (508) 852-3205 After 8:00Am For
Dining Centers Inclement Weather WORCESTER If meals are cancelled because of Bet Shalom *Kosher* (Tues & Thurs) inclement weather (snow, icy conditions, 475 Chandler Street (508) 756-7109 ext.232 etc.), the cancellation will be announced Centro Las Americas (Weds & Fri) as “Elder Services of Worcester Meals on 11 Sycamore Street (508) 798-1900 Wheels and Dining Center are closed” Grace Cafe (Weds) on: WCRN 830AM, WTAG 580AM & 41 Whitmarsh Ave (508) 832-3427 94.9FM, and WXLO 104.5 radio Lincoln Village Victoria Café (Mon,Weds, Fri) stations. You may also call the Nutrition 116 Country Club Boulevard (508)853-6419 Office at (508) 852-3205 after 8:00am for Rainbow Lunch Club (2nd & 4th Wednesdays cancellation information. of month) 90 Holden Street (508) 756-1545 x404 Rainbow Supper Club (1st Tuesday of month— Nutrition 6PM) 90 Holden Street (508) 756-1545 x404 Worcester Senior Center (Mon–Fri) Dining Centers 128 Providence Street (508) 799-8070 & AUBURN Young at Heart Café (Mon - Fri) 4 Goddard Drive (508) 832-7798 Meals on Wheels BARRE (Mon – Fri) Elder Services of Worcester Area, Inc. 557 South Barre Road (978) 355-5027 Nutrition Program BOYLSTON (Tues & Thurs) 67 Millbrook St., Suite 117 599 Main Street (508) 852-3205 Worcester, MA 01606 GRAFTON (Mon – Fri) (508) 852-3205 ext. 290 30 Providence Road (508) 839-5335 x161 www.eswa.org HOLDEN (Mon – Fri) 1128 Main Street (508) 210-5578 LEICESTER Strawberry Hill Café (Mon – Fri) 40 Winslow Avenue (508) 892-7016 MILLBURY (Mon – Fri) 1 River Street (508) 865-9247 OAKHAM Backdoor Café (Mon-Thurs) 2 Coldbrook Road (508) 882-5251 The Nutrition Project is administered by Elder Services of Worcester Area, Inc. -

2005 University of Massachusetts Football
2005 Football • MEDIA INFORMATION 2005 University of Massachusetts Football 195 2005 Football • MEDIA INFORMATION Media GUIDELINES Interviews UMass Media Relations Office • All interviews should be scheduled at least 24 hours in advance through the media relations office by calling Jason Jason Yellin Yellin (413-577-3061). Assistant A.D./Media Relations • The best time to interview Coach Don Brown is before or (Football, Men’s Basketball, after practice, Tuesday through Thursday. Men’s Lacrosse) • The best time to interview players is before practice, Phone: 413-577-3061 Tuesday through Thursday. Arrangements for interviews Cell: 413-687-1756 must be made by 2:00 p.m. the day prior to the interview Email: [email protected] so that notices can be posted for the players (example: call by 2:00 p.m. Monday for a Tuesday interview). Team practice time varies, so please call to confirm the time. Players phone Kimberly Gardner numbers will not be given out without permission and phone Associate Director interviews are requested to be done after practice as well. (Ice Hockey, Women’s Soccer, • Due to scheduling and potential class conflicts, post-practice Baseball) player interviews will be limited in number and time. Phone: 413-545-5292 • There will be no player or coach interviews on the day of a Cell: 413-687-7797 game, until after the game is finished. Email: [email protected] • The UMass locker and training rooms are off limits to media at all times, unless ushered by a UMass media relations Seth Gerard representative. Assistant Director (Women’s Basketball, Softball, Credentials Field Hockey) Requests for press, radio, television and photo credentials Phone: 413-577-0053 should be made to Jason Yellin in the UMass media relations Cell: 413-87-2237 office via email ([email protected]) or by phone (413- Email: [email protected] 577-3061). -

New Solar Research Yukon's CKRW Is 50 Uganda
December 2019 Volume 65 No. 7 . New solar research . Yukon’s CKRW is 50 . Uganda: African monitor . Cape Greco goes silent . Radio art sells for $52m . Overseas Russian radio . Oban, Sheigra DXpeditions Hon. President* Bernard Brown, 130 Ashland Road West, Sutton-in-Ashfield, Notts. NG17 2HS Secretary* Herman Boel, Papeveld 3, B-9320 Erembodegem (Aalst), Vlaanderen (Belgium) +32-476-524258 [email protected] Treasurer* Martin Hall, Glackin, 199 Clashmore, Lochinver, Lairg, Sutherland IV27 4JQ 01571-855360 [email protected] MWN General Steve Whitt, Landsvale, High Catton, Yorkshire YO41 1EH Editor* 01759-373704 [email protected] (editorial & stop press news) Membership Paul Crankshaw, 3 North Neuk, Troon, Ayrshire KA10 6TT Secretary 01292-316008 [email protected] (all changes of name or address) MWN Despatch Peter Wells, 9 Hadlow Way, Lancing, Sussex BN15 9DE 01903 851517 [email protected] (printing/ despatch enquiries) Publisher VACANCY [email protected] (all orders for club publications & CDs) MWN Contributing Editors (* = MWC Officer; all addresses are UK unless indicated) DX Loggings Martin Hall, Glackin, 199 Clashmore, Lochinver, Lairg, Sutherland IV27 4JQ 01571-855360 [email protected] Mailbag Herman Boel, Papeveld 3, B-9320 Erembodegem (Aalst), Vlaanderen (Belgium) +32-476-524258 [email protected] Home Front John Williams, 100 Gravel Lane, Hemel Hempstead, Herts HP1 1SB 01442-408567 [email protected] Eurolog John Williams, 100 Gravel Lane, Hemel Hempstead, Herts HP1 1SB World News Ton Timmerman, H. Heijermanspln 10, 2024 JJ Haarlem, The Netherlands [email protected] Beacons/Utility Desk VACANCY [email protected] Central American Tore Larsson, Frejagatan 14A, SE-521 43 Falköping, Sweden Desk +-46-515-13702 fax: 00-46-515-723519 [email protected] S. -

Boston Shine
VOL. 116 - NO. 17 BOSTON, MASSACHUSETTS, APRIL 27, 2012 $.30 A COPY Sweep Up to Help Make Cruise Season Kicks Off at Cruiseport Boston Boston Shine with a Boatload of New Itineraries Join Mayor Menino and More Than 5,000 2012 Brings Four New Cruise Lines to Boston; Residents for Boston Shines Carnival Cruise Lines Enters in a Big Way Citywide Neighborhood Cleanup April 27-28 Cruiseport Boston’s 2012 season began April 21, teer Program, to be held this when Norwegian Dawn set weekend April 27-28. Mayor sail on a special 6-day cruise Menino got into the cleanup to Bermuda, the first of 22 spirit by sweeping outside weekly cruises to the island. City Hall Plaza and releasing This is the second year for a video encouraging resi- the 2,224 passenger ship to dents to join him to help sail the ever-popular 7-day ready Boston for spring. itinerary. The season also http://bit.ly/ImiKQT. brings with it a boatload of “Boston Shines is a true new itineraries giving vaca- community event as thou- tioners many more cruising sands of volunteers and resi- options from Boston. The dents gather each year to main newcomer at Cruise- help clean up our city and port Boston is Carnival show pride in their neighbor- Cruise Lines’ 2,974-passen- hoods,” said Mayor Menino. ger Carnival Glory, which will “This is the 10th anniversary sail a series of 4, 5 and Norwegian Dawn of the program, which has 7-day itineraries to New En- become a mark of spring in gland and Atlantic Canada “We’re going to have a very the number of passengers all of our neighborhoods.