Semi-Automated Crater Depth Measurements Sylvain Breton, Cathy Quantin-Nataf, Thomas Bodin, Damien Loizeau, Matthieu Volat, Loic Lozac’H
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Tarzan Series of Edgar Rice Burroughs
I The Tarzan Series of Edgar Rice Burroughs: Lost Races and Racism in American Popular Culture James R. Nesteby Submitted to the Graduate College of Bowling Green State University in partial fulfillment of the requirements for the degree in Doctor of Philosophy August 1978 Approved: © 1978 JAMES RONALD NESTEBY ALL RIGHTS RESERVED ¡ ¡ in Abstract The Tarzan series of Edgar Rice Burroughs (1875-1950), beginning with the All-Story serialization in 1912 of Tarzan of the Apes (1914 book), reveals deepseated racism in the popular imagination of early twentieth-century American culture. The fictional fantasies of lost races like that ruled by La of Opar (or Atlantis) are interwoven with the realities of racism, particularly toward Afro-Americans and black Africans. In analyzing popular culture, Stith Thompson's Motif-Index of Folk-Literature (1932) and John G. Cawelti's Adventure, Mystery, and Romance (1976) are utilized for their indexing and formula concepts. The groundwork for examining explanations of American culture which occur in Burroughs' science fantasies about Tarzan is provided by Ray R. Browne, publisher of The Journal of Popular Culture and The Journal of American Culture, and by Gene Wise, author of American Historical Explanations (1973). The lost race tradition and its relationship to racism in American popular fiction is explored through the inner earth motif popularized by John Cleves Symmes' Symzonla: A Voyage of Discovery (1820) and Edgar Allan Poe's The narrative of A. Gordon Pym (1838); Burroughs frequently uses the motif in his perennially popular romances of adventure which have made Tarzan of the Apes (Lord Greystoke) an ubiquitous feature of American culture. -

Sinuous Ridges in Chukhung Crater, Tempe Terra, Mars: Implications for Fluvial, Glacial, and Glaciofluvial Activity
This is a repository copy of Sinuous ridges in Chukhung crater, Tempe Terra, Mars: Implications for fluvial, glacial, and glaciofluvial activity. White Rose Research Online URL for this paper: http://eprints.whiterose.ac.uk/166644/ Version: Published Version Article: Butcher, F.E.G. orcid.org/0000-0002-5392-7286, Balme, M.R., Conway, S.J. et al. (6 more authors) (2021) Sinuous ridges in Chukhung crater, Tempe Terra, Mars: Implications for fluvial, glacial, and glaciofluvial activity. Icarus, 357. 114131. ISSN 0019-1035 https://doi.org/10.1016/j.icarus.2020.114131 Reuse This article is distributed under the terms of the Creative Commons Attribution (CC BY) licence. This licence allows you to distribute, remix, tweak, and build upon the work, even commercially, as long as you credit the authors for the original work. More information and the full terms of the licence here: https://creativecommons.org/licenses/ Takedown If you consider content in White Rose Research Online to be in breach of UK law, please notify us by emailing [email protected] including the URL of the record and the reason for the withdrawal request. [email protected] https://eprints.whiterose.ac.uk/ Journal Pre-proof Sinuous ridges in Chukhung crater, Tempe Terra, Mars: Implications for fluvial, glacial, and glaciofluvial activity Frances E.G. Butcher, Matthew R. Balme, Susan J. Conway, Colman Gallagher, Neil S. Arnold, Robert D. Storrar, Stephen R. Lewis, Axel Hagermann, Joel M. Davis PII: S0019-1035(20)30473-5 DOI: https://doi.org/10.1016/j.icarus.2020.114131 Reference: YICAR 114131 To appear in: Icarus Received date: 2 June 2020 Revised date: 19 August 2020 Accepted date: 28 September 2020 Please cite this article as: F.E.G. -
Jack Wright1, David A. Rothery1, Matt R. Balme1 and Susan J. Conway2
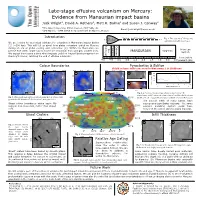
Late-stage effusive volcanism on Mercury: Evidence from Mansurian impact basins Jack Wright1, David A. Rothery1, Matt R. Balme1 and Susan J. Conway2 1The Open University, Milton Keynes, MK7 6AA, UK Email: [email protected] 2LPG Nantes - UMR CNRS 6112 Université de Nantes, France Introduction Young, post-impact volcanism Fig. 1. Time systems of Mercury and ? Widespread Volcanism ? conventional absolute model ages. We are looking for geological evidence for volcanism in Mansurian impact basins Tolstojan Tolstojan [1] (>100 km). This will tell us about how plains volcanism ended on Mercury Calorian during an era of global cooling and contraction [2]. Within the Mansurian, we Pre- Hermean predict that older, larger basins host more volcanism than younger, smaller ones. Kuiperian MANSURIAN System We expect there came a time when impacts could no longer liberate magma from Mercury's interior, marking the end of effusive volcanism. Time before 4.5 4.0 3.5 3.0 2.5 2.0 1.5 1.0 0.5 0.0 present (Ga) Colour Boundaries Pyroclastics & Edifice Shield volcano talk tomorrow in Waterway 1 @ 10.00 am! 18°E 20°E 22°E 54°E 56°E 58°E 52°E 56°E 60°E 120°E 122°E 124°E 123°E A B C A B D 1000 34°S ± 800 30°N ± 600 ± 2020 kmkm 400 8°S ± ± 200 14°S 34°S 0 C 0 5 10 15 20 25 30 relative relative elevation m / 34°S 26°N ± A distance along profile / km A' 10°S 2020 kmkm 200200 kmkm 100100 kmkm 36°S 123°E 16°S -5 km Mercury global topography +4 km 100100 kmkm 100100 kmkm Fig. -

Templeton's Peace Trent Devell Hudley University of Texas at El Paso, [email protected]
University of Texas at El Paso DigitalCommons@UTEP Open Access Theses & Dissertations 2009-01-01 Templeton's Peace Trent Devell Hudley University of Texas at El Paso, [email protected] Follow this and additional works at: https://digitalcommons.utep.edu/open_etd Part of the American Literature Commons, Literature in English, North America Commons, and the Modern Literature Commons Recommended Citation Hudley, Trent Devell, "Templeton's Peace" (2009). Open Access Theses & Dissertations. 285. https://digitalcommons.utep.edu/open_etd/285 This is brought to you for free and open access by DigitalCommons@UTEP. It has been accepted for inclusion in Open Access Theses & Dissertations by an authorized administrator of DigitalCommons@UTEP. For more information, please contact [email protected]. TEMPLETON’S PEACE TRENT D. HUDLEY Department of Creative Writing APPROVED: Daniel Chacón, MFA, Committee Chair Johnny Payne, Ph.D. Mimi Gladstein, Ph.D. Patricia D. Witherspoon, Ph.D. Dean of the Graduate School Copyright © by Trent Hudley May 2009 Dedication To everyone I’ve ever hurt TEMPLETON’S PEACE by TRENT D. HUDLEY THESIS Presented to the Faculty of the Graduate School of The University of Texas at El Paso in Partial Fulfillment of the Requirements for the Degree of MASTER OF FINE ARTS Department of Creative Writing THE UNIVERSITY OF TEXAS AT EL PASO May 2009 Acknowledgements First I would like to thank my parents, Darrold and Majorie Hudley for their continued support in all that I have done. They have been there for me throughout everything whether it was for my accomplishments or things less noble. I owe them my heart. -
2D Mercury Crater Wordsearch V2
3/24/2019 Word Search Generator :: Create your own printable word find worksheets @ A to Z Teacher Stuff MAKE YOUR OWN WORKSHEETS ONLINE @ WWW.ATOZTEACHERSTUFF.COM NAME:_______________________________ DATE:_____________ Craters on Mercury SICINIMODFIQPVMRQSLJ BEETHOVEN MICHELANGELO BLTVPTSDUOMRCIPDRAEN BYRON RAPHAEL YAPVWYPXSEHAUEHSEVDI CUNNINGHAM SAVAGE RRZAYRKFJROGNIGSNAIA DAMER SHAKESPEARE ORTNPIVOCDTJNRRSKGSW DOMINICI SVEINSDOTTIR NOMGETIKLKEUIAAGLEYT DRISCOLL TOLSTOI PCLOLTVLOEPSNDPNUMQK ELLINGTON VANGOGH YHEGLOAAEIGEGAHQAPRR FAULKNER VIEIRADASILVA NANHIDLNTNNNHSAOFVLA HEMINGWAY VIVALDI VDGYNSDGGMNGAIEDMRAM HOLST GALQGNIEBIMOMLLCNEZG HOMER VMESTIWWKWCANVEKLVRU IMHOTEP ZELTOEPSBOAWMAUHKCIS IZQUIERDO JRQGNVMODREIUQZICDTH JOPLIN SHAKESPEARETOLSTOIOX KIPLING BBCZWAQSZRSLPKOJHLMA LANGE SFRLLOCSIRDIYGSSSTQT LARROCHA FKUIDTISIYYFAIITRODE LENGLE NILPOJHEMINGWAYEGXLM LENNON BEETHOVENRYSKIPLINGV MARKTWAIN 1/2 Mercury Craters: Famous Writers, Artists, and Composers: Location and Sizes Beethoven: Ludwig van Beethoven (1770−1827). German composer and pianist. 20.9°S, 124.2°W; Diameter = 630 km. Byron: Lord Byron (George Byron) (1788−1824). British poet and politician. 8.4°S, 33°W; Diameter = 106.6 km. Cunningham: Imogen Cunningham (1883−1976). American photographer. 30.4°N, 157.1°E; Diameter = 37 km. Damer: Anne Seymour Damer (1748−1828). English sculptor. 36.4°N, 115.8°W; Diameter = 60 km. Dominici: Maria de Dominici (1645−1703). Maltese painter, sculptor, and Carmelite nun. 1.3°N, 36.5°W; Diameter = 20 km. Driscoll: Clara Driscoll (1861−1944). American glass designer. 30.6°N, 33.6°W; Diameter = 30 km. Ellington: Edward Kennedy “Duke” Ellington (1899−1974). American composer, pianist, and jazz orchestra leader. 12.9°S, 26.1°E; Diameter = 216 km. Faulkner: William Faulkner (1897−1962). American writer and Nobel Prize laureate. 8.1°N, 77.0°E; Diameter = 168 km. Hemingway: Ernest Hemingway (1899−1961). American journalist, novelist, and short-story writer. 17.4°N, 3.1°W; Diameter = 126 km. -

MESSENGER Reveals Mercury in New Detail 16 January 2008
MESSENGER Reveals Mercury in New Detail 16 January 2008 It is already clear that MESSENGER’s superior camera will tell us much that could not be resolved even on the side of Mercury viewed by Mariner’s vidicon camera in the mid-1970s. This MESSENGER image was taken from a distance of about18,000 kilometers (11,000 miles), about 56 minutes before the spacecraft's closest encounter with Mercury. It shows a region roughly 500 kilometers (300 miles) across, and craters as small as 1 kilometer (0.6 mile) can be seen in this image. Source: JHU/APL Credit: NASA/Johns Hopkins University Applied Physics Laboratory/Carnegie Institution of Washington As MESSENGER approached Mercury on January 14, 2008, the spacecraft’s Narrow-Angle Camera on the Mercury Dual Imaging System (MDIS) instrument captured this view of the planet’s rugged, cratered landscape illuminated obliquely by the Sun. The large, shadow-filled, double ringed crater to the upper right was glimpsed by Mariner 10 more than three decades ago and named Vivaldi, after the Italian composer. Its outer ring has a diameter of about 200 kilometers (about 125 miles). MESSENGER’s modern camera has revealed detail that was not well seen by Mariner 10, including the broad ancient depression overlapped by the lower-left part of the Vivaldi crater. The MESSENGER science team is in the process of evaluating later images snapped from even closer range showing features on the side of Mercury never seen by Mariner 10. 1 / 2 APA citation: MESSENGER Reveals Mercury in New Detail (2008, January 16) retrieved 3 October 2021 from https://phys.org/news/2008-01-messenger-reveals-mercury.html This document is subject to copyright. -
Annual Report 2005
NATIONAL GALLERY BOARD OF TRUSTEES (as of 30 September 2005) Victoria P. Sant John C. Fontaine Chairman Chair Earl A. Powell III Frederick W. Beinecke Robert F. Erburu Heidi L. Berry John C. Fontaine W. Russell G. Byers, Jr. Sharon P. Rockefeller Melvin S. Cohen John Wilmerding Edwin L. Cox Robert W. Duemling James T. Dyke Victoria P. Sant Barney A. Ebsworth Chairman Mark D. Ein John W. Snow Gregory W. Fazakerley Secretary of the Treasury Doris Fisher Robert F. Erburu Victoria P. Sant Robert F. Erburu Aaron I. Fleischman Chairman President John C. Fontaine Juliet C. Folger Sharon P. Rockefeller John Freidenrich John Wilmerding Marina K. French Morton Funger Lenore Greenberg Robert F. Erburu Rose Ellen Meyerhoff Greene Chairman Richard C. Hedreen John W. Snow Eric H. Holder, Jr. Secretary of the Treasury Victoria P. Sant Robert J. Hurst Alberto Ibarguen John C. Fontaine Betsy K. Karel Sharon P. Rockefeller Linda H. Kaufman John Wilmerding James V. Kimsey Mark J. Kington Robert L. Kirk Ruth Carter Stevenson Leonard A. Lauder Alexander M. Laughlin Alexander M. Laughlin Robert H. Smith LaSalle D. Leffall Julian Ganz, Jr. Joyce Menschel David O. Maxwell Harvey S. Shipley Miller Diane A. Nixon John Wilmerding John G. Roberts, Jr. John G. Pappajohn Chief Justice of the Victoria P. Sant United States President Sally Engelhard Pingree Earl A. Powell III Diana Prince Director Mitchell P. Rales Alan Shestack Catherine B. Reynolds Deputy Director David M. Rubenstein Elizabeth Cropper RogerW. Sant Dean, Center for Advanced Study in the Visual Arts B. Francis Saul II Darrell R. Willson Thomas A. -

Cambridge University Press 978-1-107-15445-2 — Mercury Edited by Sean C
Cambridge University Press 978-1-107-15445-2 — Mercury Edited by Sean C. Solomon , Larry R. Nittler , Brian J. Anderson Index More Information INDEX 253 Mathilde, 196 BepiColombo, 46, 109, 134, 136, 138, 279, 314, 315, 366, 403, 463, 2P/Encke, 392 487, 488, 535, 544, 546, 547, 548–562, 563, 564, 565 4 Vesta, 195, 196, 350 BELA. See BepiColombo: BepiColombo Laser Altimeter 433 Eros, 195, 196, 339 BepiColombo Laser Altimeter, 554, 557, 558 gravity assists, 555 activation energy, 409, 412 gyroscope, 556 adiabat, 38 HGA. See BepiColombo: high-gain antenna adiabatic decompression melting, 38, 60, 168, 186 high-gain antenna, 556, 560 adiabatic gradient, 96 ISA. See BepiColombo: Italian Spring Accelerometer admittance, 64, 65, 74, 271 Italian Spring Accelerometer, 549, 554, 557, 558 aerodynamic fractionation, 507, 509 Magnetospheric Orbiter Sunshield and Interface, 552, 553, 555, 560 Airy isostasy, 64 MDM. See BepiColombo: Mercury Dust Monitor Al. See aluminum Mercury Dust Monitor, 554, 560–561 Al exosphere. See aluminum exosphere Mercury flybys, 555 albedo, 192, 198 Mercury Gamma-ray and Neutron Spectrometer, 554, 558 compared with other bodies, 196 Mercury Imaging X-ray Spectrometer, 558 Alfvén Mach number, 430, 433, 442, 463 Mercury Magnetospheric Orbiter, 552, 553, 554, 555, 556, 557, aluminum, 36, 38, 147, 177, 178–184, 185, 186, 209, 559–561 210 Mercury Orbiter Radio Science Experiment, 554, 556–558 aluminum exosphere, 371, 399–400, 403, 423–424 Mercury Planetary Orbiter, 366, 549, 550, 551, 552, 553, 554, 555, ground-based observations, 423 556–559, 560, 562 andesite, 179, 182, 183 Mercury Plasma Particle Experiment, 554, 561 Andrade creep function, 100 Mercury Sodium Atmospheric Spectral Imager, 554, 561 Andrade rheological model, 100 Mercury Thermal Infrared Spectrometer, 366, 554, 557–558 anorthosite, 30, 210 Mercury Transfer Module, 552, 553, 555, 561–562 anticline, 70, 251 MERTIS. -

View the 2021 Tufts University Commencement Program (PDF)
165TH Commencement Tufts University Sunday, May 23, 2021 Commencement 2021 Commencement 2021 School of Arts and Sciences School of Engineering School of Medicine and Graduate School of Biomedical Sciences School of Dental Medicine The Fletcher School of Law and Diplomacy Cummings School of Veterinary Medicine The Gerald J. and Dorothy R. Friedman School of Nutrition Science and Policy Jonathan M. Tisch College of Civic Life University College #Tufts2021 commencement.tufts.edu Produced by Tufts Communications and Marketing Printed on recycled paper Table of Contents Welcome from the President 5 University Commencement 7 Dear Alma Mater 10 Tuftonia’s Day Academic Mace Academic Regalia Recipients of Honorary Degrees 11 School of Arts and Sciences 15 Graduate School of Arts and Sciences School of Engineering School of Medicine 43 Graduate School of Biomedical Sciences 48 Public Health and Professional Degree Programs 52 School of Dental Medicine 59 The Fletcher School of Law and Diplomacy 67 Cummings School of Veterinary Medicine 73 The Gerald J. and Dorothy R. Friedman 79 School of Nutrition Science and Policy Jonathan M. Tisch College of Civic Life 83 COMMENCEMENT 2021 3 Welcome from the President Commencement is the high point of the academic year and has always been a special day at Tufts. While this year’s virtual celebration makes us less anxious about the weather forecast, this moment is no less extraordinary and no less distinguished. After a period of rigorous study, intellectual pursuit, and personal growth, our students stand ready to graduate from their respective academic programs and this great university. Today, we celebrate their achievements and recognize all those who have helped make this day possible. -

PDF (V. 73:11 December 9, 1971)
Bah, Humbug! IlIFORNIA Copvright 197] by the Associated Students of tl,,,. CaliforniaTechInstitute of Technology. Incorppratf'd. Volume LXXIII Pasadena, California, Thursday, December 9, 1971 Number 11 New ASCIT Funding 1mplemented:Controls Frosh Win Cold Mudeo: Now In Your Hands Juniors Beat All Runners by Norris Krueger by Channon Price everyone's choice for Mudeo prin There have been serious ques Was it ever really in doubt? cess. The Juniors also decided to tions raised concerning the oper What made this year's Mudeo name the first Mudeo Queen this ation of students marking how they more interesting than all of its year to go along with the othe; want their dues spent. First, we equally curious parts was the way precedent setting innovations. encourage people to support acti the Juniors managed to lull the The afternoon was cool and vities that they will (or might) Sophomores into a relative state of overcast and the forecast high was participate in and to support other quietude, all the while, of course, for 60 0, so of course the pit was in things they feel are worthwhile. scheming to award the Frosh a last perfect condition. The frosh fin (For example, you don't have to be second victory and beat a hasty ished the preparations by destoning a jock to support athletic awards.) retreat to a waiting, warmed-up the pit, and then readied themselves This in NO way limits the range of escape vehicle. for the challenge of the sopho activities you can take part in, (For For a time it looked as though mores. -

Low-Albedo Surfaces and Eolian Sediment: Mars Orbiter Camera Views of Western Arabia Terra Craters and Wind Streaks
Low-albedo surfaces and eolian sediment: Mars Orbiter Camera views of western Arabia Terra craters and wind streaks Kenneth S. Edgett Malin Space Science Systems, Inc., San Diego, California, USA Abstract. High spatial resolution (1.5 to 6 m/pixel) Mars Global Surveyor Mars Orbiter Camera images obtained September 1997 to June 2001 show that each of the large, dark wind streaks of western Arabia Terra originate at a barchan dune field on a crater floor. The streaks consist of a relatively thin (< 1 m) coating of sediment deflated from the dune fields and their vicinity. In most cases, this sediment drapes over a previous mantle that more thickly covers nearly all of western Arabia Terra. No concurrent eolian bedforms are found within the dark streaks, nor do any dunes climb up crater walls to deliver sand via saltation to the streaks. The relations between dunes, wind streak, and subjacent terrain imply that dark-toned grains finer than those that comprise the dunes are lifted into suspension and carried out of the craters to be deposited on the adjacent terrain. Previous eolian physics and thermal inertia studies suggest that, under modern Martian conditions, such grains likely include silt (3.9–62.5 !m), very fine sand (62.5–125 !m), and possibly fine sand (to ~210 !m). The streaks change in terms of extent, relative albedo, and surface pattern over periods measured in years; however, through June 2001, very little evidence for recent eolian activity (dust plumes, storms, dune movement) was observed. received 18 July 2001, revised 21 December 2001, accepted 2 January 2002, published 13 June 2002 Citation: Edgett, K. -

City of Port St. Lucie Future Land
SCOTT E I N L 6 T D 2 R 1 I A Y t i S N M U x N E S R E I T V E E MIDWAY S I MIDWAY R R E N C M R MIDWAY U M BORR R LGA OMEGA H OSC REGAL ALE 1ST ACLOUGH U A P A T E OSC L SLC T/U B D C S T L R T R R E CS K E A L O T S V E I G E R RAY TWIG JOHNSTON M CG/CH/ROI CS/CG CG I DANIELS O P 2ND I A A CG F G M L NO H 6 E CG N BRADLEY BRADLEY P D T T Y CG/CH/ROI W CG CG/ROI CG 2 S A ASHLEY 5 A OSC N T E 1 J S E I 2 A AINBOW 2 t R S M SLC T/U T N i W 3RD N K U/LI RIV T E ER B x O E D RAN OSC LTON CH HOSBINE S HOSBINE E CG/CS/CH/LI CH/CS/LI R ENDERS W OD O O 1 EETW S CS T E M LNER FL L T MI H F U L RL W I/LI BENGAL A I R Y E L CL EDELL C R NOTLEM O L IR K O T V R I O L R M RIVER HAMMOCK E O E S KINGSWOOD I O ON T C C U OSC H S Y D L V SP E LUCY FLOOD E A L G H C A E T R K MELTON T E E B D M R N C OSC T O O OSC I E OSC 5 I R T Y R M A N M DRIFTWOOD OSC E 2 RL B M I N ANITA 3 T U HWY T K S ROI OSR P L LI A OSC LAMOORE CANOE CREEK P H RL O A E E A L L BUCKEYE A OSC SMALLWOOD A S RL RL M GREGORY N S A M T O I L R I O OSC S S H A L BRACK P N M W N G CS/LI/HI/ROI E O R T N A OC OSC A A E A W O 5 D P N OSC 2 V RL C E N T CS/LI/ROI N RM/ROI/CGOSC L S GAMMA 2 L I N GRAND OAK CORY CAMPBELL S Y D I OSC U T E GOPHER HOWARD OSC LC OSC OSC OSC D GOPHER RIDGE GOPHER HILL HOWARD R R ROI IS A U U OSC OLD KEY WEST U U RELIEF SCEPTER S I C BOYDGA MODEL V KEARNEY C T O COUNTRY GARDENS SEAHORSE OSR E A MANGROVE BAY I O N R M SLC MXD D B O N D F A T Y E T F C E THEDA U M R T O E S T E I Y RM R Y O LY A R SEA CONCH A E S R R R B K T IA E I E OLIVE M B CARLA E B H V E R