Numerical Analysis of the Rudder–Propeller Interaction
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Propeller Operation and Malfunctions Basic Familiarization for Flight Crews
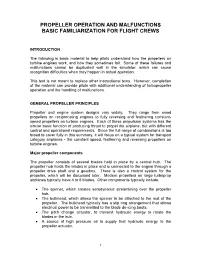
PROPELLER OPERATION AND MALFUNCTIONS BASIC FAMILIARIZATION FOR FLIGHT CREWS INTRODUCTION The following is basic material to help pilots understand how the propellers on turbine engines work, and how they sometimes fail. Some of these failures and malfunctions cannot be duplicated well in the simulator, which can cause recognition difficulties when they happen in actual operation. This text is not meant to replace other instructional texts. However, completion of the material can provide pilots with additional understanding of turbopropeller operation and the handling of malfunctions. GENERAL PROPELLER PRINCIPLES Propeller and engine system designs vary widely. They range from wood propellers on reciprocating engines to fully reversing and feathering constant- speed propellers on turbine engines. Each of these propulsion systems has the similar basic function of producing thrust to propel the airplane, but with different control and operational requirements. Since the full range of combinations is too broad to cover fully in this summary, it will focus on a typical system for transport category airplanes - the constant speed, feathering and reversing propellers on turbine engines. Major propeller components The propeller consists of several blades held in place by a central hub. The propeller hub holds the blades in place and is connected to the engine through a propeller drive shaft and a gearbox. There is also a control system for the propeller, which will be discussed later. Modern propellers on large turboprop airplanes typically have 4 to 6 blades. Other components typically include: The spinner, which creates aerodynamic streamlining over the propeller hub. The bulkhead, which allows the spinner to be attached to the rest of the propeller. -

Use of Rudder on Boeing Aircraft
12ADOBL02 December 2011 Use of rudder on Boeing aircraft According to Boeing the Primary uses for rudder input are in crosswind operations, directional control on takeoff or roll out and in the event of engine failure. This Briefing Leaflet was produced in co-operation with Boeing and supersedes the IFALPA document 03SAB001 and applies to all models of the following Boeing aircraft: 707, 717, 727, 737, 747, 757, 767, 777, 787, DC-8, DC-9, DC-10, MD-10, md-11, MD-80, MD-90 Sideslip Angle Fig 1: Rudder induced sideslip Background As part of the investigation of the American Airlines Flt 587 crash on Heading Long Island, USA the United States National Transportation Safety Board (NTSB) issued a safety recommendation letter which called Flight path for pilots to be made aware that the use of “sequential full opposite rudder inputs can potentially lead to structural loads that exceed those addressed by the requirements of certification”. Aircraft are designed and tested based on certain assumptions of how pilots will use the rudder. These assumptions drive the FAA/EASA, and other certifica- tion bodies, requirements. Consequently, this type of structural failure is rare (with only one event over more than 45 years). However, this information about the characteristics of Boeing aircraft performance in usual circumstances may prove useful. Rudder manoeuvring considerations At the outset it is a good idea to review and consider the rudder and it’s aerodynamic effects. Jet transport aircraft, especially those with wing mounted engines, have large and powerful rudders these are neces- sary to provide sufficient directional control of asymmetric thrust after an engine failure on take-off and provide suitable crosswind capability for both take-off and landing. -

2 Review of Composite Propeller Developments
'HIHQFH5HVHDUFKDQG 5HFKHUFKHHWGpYHORSSHPHQW 'HYHORSPHQW&DQDGD SRXUODGpIHQVH&DQDGD Review of Composite Propeller Developments and Strategy for Modeling Composite Propellers using PVAST Tamunoiyala S. Koko Khaled O. Shahin Unyime O. Akpan Merv E. Norwood Prepared By: Martec Limited 1888 Brunswick Street, Suite 400 Halifax, NS B3J 3J8 Team Leader, Reliability & Risk Engineering Contractor's Document Number: TR-11-XX Contract Project Manager: Tamunoiyala S. Koko, 902-425-5101 Ext 243 PWGSC Contract Number: W7707-088100 Task 10 &6$/D\WRQ*LOUR\ The scientific or technical validity of this Contract Report is entirely the responsibility of the Contractor and the contents do not necessarily have the approval or endorsement of Defence R&D Canada. Defence R&D Canada – Atlantic &RQWUDFW5HSRUW '5'&$WODQWLF&5 6HSWHPEHU Review of Composite Propeller Developments and Strategy for Modeling Composite Propellers using PVAST Tamunoiyala S. Koko Khaled O. Shahin Unyime O. Akpan Merv E. Norwood Prepared By: Martec Limited 1888 Brunswick Street, Suite 400 Halifax, NS B3J 3J8 Team Leader, Reliability & Risk Engineering Contractor's Document Number: TR-11-XX Contract Project Manager: Tamunoiyala S. Koko, 902-425-5101 Ext 243 PWGSC Contract Number: W7707-088100 Task 10 &6$/D\WRQ*LOUR\ The scientific or technical validity of this Contract Report is entirely the responsibility of the Contractor and the contents do not necessarily have the approval or endorsement of Defence R&D Canada. Defence R&D Canada – Atlantic Contract Report DRDC Atlantic CR 2011-156 6HSWHPEHU © Her Majesty the Queen in Right of Canada, as represented by the Minister of National Defence, 201 © Sa Majesté la Reine (en droit du Canada), telle que représentée par le ministre de la Défense nationale, 201 Abstract ……. -

Touring Rudder Sit-On Top Kit Kit to Fit Rudder Enabled Sit-On Tops with a 10Mm Rudder Fixing Point
touring rudder sit-on top kit Kit to fit rudder enabled sit-on tops with a 10mm rudder fixing point. Note: It is easier to fit the Touring Rudder System if you have a screw hatch fitted to the rear stowage area of the kayak. If your kayak does not have this screw hatch and you wish to fit one, please contact a Perception dealer for advice. These instructions explain how to fit the rudder kit to a kayak with or without a rear screw hatch in place. Please make sure you follow the correct steps for your version of sit-on top kayak. This kit should contain the following: 1x rudder assembly with up-haul rope & split ring 4x deck fittings 4x length of rudder hose 5x self tapping screws 2x Dyneema control line - with cord end assembly 2x oval toggle 1x pair of Tip-Toes control footrests with foam washers 1x length of 4mm shock cord 6x footrest screws, washers and nuts - pre-fitted 1x rudder park - inc. hook, shock cord & fixing block You will also require some tools to fit this kit: Drill with 3mm, 5mm and 6mm drill bits Marker pen Short phillips screwdriver Wire cutters Small adjustable spanner or pair of pliers Lighter Tape measure Small amount of sticky tape Please read these instructions carefully before fitting! Step 1 - Control line entry points The rudder will need to have two control lines attached, each one running through hose sections inside the kayak from the rudder to the Tip-Toes footrests. This kit has four hose sections (two pairs) as two sections are needed per control line. -

Marine Propellers
2.016 Hydrodynamics Reading #10 2.016 Hydrodynamics Prof. A.H. Techet Marine Propellers Today, conventional marine propellers remain the standard propulsion mechanism for surface ships and underwater vehicles. Modifications of basic propeller geometries into water jet propulsors and alternate style thrusters on underwater vehicles has not significantly changed how we determine and analyze propeller performance. We still need propellers to generate adequate thrust to propel a vessel at some design speed with some care taken in ensuring some “reasonable” propulsive efficiency. Considerations are made to match the engine’s power and shaft speed, as well as the size of the vessel and the ship’s operating speed, with an appropriately designed propeller. Given that the above conditions are interdependent (ship speed depends on ship size, power required depends on desired speed, etc.) we must at least know a priori our desired operating speed for a given vessel. Following this we should understand the basic relationship between ship power, shaft torque and fuel consumption. Power: Power is simply force times velocity, where 1 HP (horsepower, english units) is equal to 0.7457 kW (kilowatt, metric) and 1kW = 1000 Newtons*meters/second. P = F*V (1.1) Effective Horsepower (EHP) is the power required to overcome a vessel’s total resistance at a given speed, not including the power required to turn the propeller or operate any machinery (this is close to the power required to tow a vessel). version 3.0 updated 8/30/2005 -1- ©2005 A. Techet 2.016 Hydrodynamics Reading #10 Indicated Horsepower (IHP) is the power required to drive a ship at a given speed, including the power required to turn the propeller and to overcome any additional friction inherent in the system. -

Aerosport Modeling Rudder Trim
AEROSPORT MODELING RUDDER TRIM Segment: MOBILITY PARTS PROVIDERS | Engineering companies Application vertical: MOBILITY AND TRANSPORTATION | AircraFt Application type: FINAL PART: Short runs THE CUSTOMER FINAL PART: SHORT RUNS AEROSPORT MODELING RUDDER TRIM COMPANY DESCRIPTION APPLICATION TRADITIONAL MANUFACTURING Some planes are equipped with small tabs on the control surfaces (e.g., rudder trim Assembly of 26 different machined and standard parts Aerosport Modeling & Design was established in tabs, aileron tabs, elevator tabs) so the pilot can make minute adjustments to pitch, September 1996, and since then, they have worked to yaw, and roll to keep the airplane flying a true, clean line through the air. This produce the highest-possible quality prototypes, improves speed by reducing drag from the larger, constant movements of the full appearance models, working models, and machined rudder, aileron, and elevator. parts, and to meet or exceed client expectations. The company strives to be seen as a partner to their Many airplanes also have rudder and/or aileron trim systems. On some, the rudder clients and an extension of their design and trim tab is rigid but adjustable on the ground by bending: It is angled slightly to the development team, not just a supplier of prototyping left (when viewed from behind) to lessen the need for the pilot to push the rudder services. pedal constantly in order to overcome the left-turning tendencies of many prop- driven aircraft. Some aircraft have hinged rudder trim tabs that the pilot can adjust Aerosport Products spun off from sister company in flight. Aerosport Modeling & Design in 2009 to develop products for experimental aircraft, the first of which When a servo tab is employed, it is moved into the slipstream opposite of the was the RV-10 Carbon Fiber Instrument Panel. -
Want Something Better Than the OEM Propeller?
Quick Reference Guide Product Info • Prop Selection • Crossover Info • Part List Want Something Better Than The OEM Propeller? Run FASTER • Pull HARDER • Handle BETTER Get A free Diameter & Pitch Recommendation Today Visit us on the web at: https://turningpointpropellers.com/PROPWIZARD 6-300+hp • 3 AND 4 BLADE • ALUMINUM AND STAINLESS STEEL OUTBOARD AND STERNDRIVE BOAT PROPELLERS AVAILABLE FOR: Coleman® Evinrude® Honda® Johnson® Mariner® Mercury® MerCruiser® Nissan® OMC® Parsun® Suzuki® Tohatsu® Volvo Penta® Yamaha® Turning Point Propellers Industry Leading Manufacturer of Aluminum and Stainless Steel Pleasure Boat Propellers NO FASTER PROP ON THE WATER CONTENTS About Turning Point Propellers 1-6 Propeller Selection 7-14 OEM & Aftermarket Brand Crossover 15 ® Solas Crossover to Turning Point 16-24 Turning Point Propellers Features and Benefits (Con’t) ® Quicksilver Crossover to Turning Point 25-26 ® 11762 Marco Beach Drive STE. 2 Michigan Wheel Crossover to Turning Point 27-30 Jacksonville, FL 32224 Premium ULTRACOAT Powder Coat (Hustler Prop Series) Turning Point Propellers Part List 30-31 United States • Exclusive to Turning Point, the Ultracoat powder coat rivals a fine automotive finish, and 24 Hour Slurry Test: 600% More Wear! Competitor’s Process Office Hours: 9am-5pm ET M-F is more durable than paint. Phone: +1 904-900-7739 • Utilizing a state-of-the-art five step process, Ultracoat gives the propeller a shiny, uniform Who Is Turning Point Propellers Press (1) for Product Installation & Tech Support • One of the worlds largest propeller manufacturers. We own and operate our own aluminum Press (2) for Purchase Orders & Accounting appearance that enhances any boat’s good looks. -

Marine Propellers and Propulsion to Jane and Caroline Marine Propellers and Propulsion
Marine Propellers and Propulsion To Jane and Caroline Marine Propellers and Propulsion Second Edition J S Carlton Global Head of MarineTechnology and Investigation, Lloyd’s Register AMSTERDAM • BOSTON • HEIDELBERG • LONDON • NEW YORK • OXFORD PARIS • SAN DIEGO • SAN FRANCISCO • SINGAPORE • SYDNEY • TOKYO Butterworth-Heinemann is an imprint of Elsevier Butterworth-Heinemann is an imprint of Elsevier Linacre House, Jordan Hill, Oxford OX2 8DP 30 Corporate Drive, Suite 400, Burlington, MA 01803, USA First edition 1994 Second edition 2007 Copyright © 2007, John Carlton. Published by Elsevier Ltd. All right reserved The right of John Carlton to be identified as the authors of this work has been asserted in accordance with the Copyright, Designs and Patents Act 1988 No part of this publication may be reproduced, stored in a retrieval system or transmitted in any form or by any means electronic, mechanical, photocopying, recording or otherwise without the prior written permission of the publisher Permissions may be sought directly from Elsevier’s Science & Technology Rights Department in Oxford, UK: phone ( 44) (0) 1865 843830; fax ( 44) (0) 1865 853333; email: [email protected]. Alternatively+ you can submit your+ request online by visiting the Elsevier web site at http://elsevier.com/locate/permissions, and selecting Obtaining permission to use Elsevier material Notice No responsibility is assumed by the published for any injury and/or damage to persons or property as a matter of products liability, negligence or otherwise, or from any use or operation of any methods, products, instructions or ideas contained in the material herein. Because of rapid advances in the medical sciences, in particular, independent verification of diagnoses and drug dosages should be made British Library Cataloguing in Publication Data Carlton, J. -
Low and High Speed Propellers for General Aviation - Performance Potential and Recent Wind Tunnel Test Results
NASA Technical Memorandum 8 1745 Low and High Speed Propellers for General Aviation - Performance Potential and Recent Wind Tunnel Test Results Robert J. Jeracki and Glenn A. Mitchell Lewis Research Center Cleveland, Ohio i I Prepared for the ! National Business Aircraft Meeting sponsored by the Society of Automotive Engineers Wichita, Kansas, April 7-10, 1981 LOW AND HIGH SPEED PROPELLERS FOR GENERAL AVIATION - PERFORMANCE POTENTIAL AND RECENT WIND TUNNEL TEST RESULTS by Robert J. Jeracki and Glenn A. Mitchell National Aeronautics and Space Administration Lewis Research Center Cleveland, Ohio 441 35 THE VAST MAJORlTY OF GENERAL-AVIATION AIRCRAFT manufactured in the United States are propel- ler powered. Most of these aircraft use pro- peller designs based on technology that has not changed significantlv since the 1940's and early 1950's. This older technology has been adequate; however, with the current world en- ergy shortage and the possibility of more stringent noise regulations, improved technol- ogy is needed. Studies conducted by NASA and industry indicate that there are a number of improvements in the technology of general- aviation (G.A.) propellers that could lead to significant energy savings. New concepts like blade sweep, proplets, and composite materi- als, along with advanced analysis techniques have the potential for improving the perform- ance and lowering the noise of future propel- ler-powererd aircraft that cruise at lower speeds. Current propeller-powered general- aviation aircraft are limited by propeller compressibility losses and limited power out- put of current engines to maximum cruise speeds below Mach 0.6. The technology being developed as part of NASA's Advanced Turboprop Project offers the potential of extending this limit to at least Mach 0.8. -

Hydromatic Propeller
HYDROMATIC PROPELLER International Historic Engineering Landmark Hamilton Standard The American Society of A Division of United Technologies Mechanical Engineers Windsor Locks, Connecticut November 8, 1990 Historical Significance The text of this International Landmark Designation: The Hamilton Standard Hydromatic propeller represented INTERNATIONAL HISTORIC MECHANICAL a major advance in propeller design and laid the groundwork ENGINEERING LANDMARK for further advancements in propulsion over the next 50 years. The Hydromatic was designed to accommodate HAMILTON STANDARD larger blades for increased thrust, and provide a faster rate HYDROMATIC PROPELLER of pitch change and a wider range of pitch control. This WINDSOR LOCKS, CONNECTICUT propeller utilized high-pressure oil, applied to both sides of LATE 1930s the actuating piston, for pitch control as well as feathering — the act of stopping propeller rotation on a non-functioning The variable-pitch aircraft propeller allows the adjustment engine to reduce drag and vibration — allowing multiengined in flight of blade pitch, making optimal use of the engine’s aircraft to safely continue flight on remaining engine(s). power under varying flight conditions. On multi-engined The Hydromatic entered production in the late 1930s, just aircraft it also permits feathering the propeller--stopping its in time to meet the requirements of the high-performance rotation--of a nonfunctioning engine to reduce drag and military and transport aircraft of World War II. The vibration. propeller’s performance, durability and reliability made a The Hydromatic propeller was designed for larger blades, major contribution to the successful efforts of the U.S. and faster rate of pitch change, and wider range of pitch control Allied air forces. -

COURSE INFORMATION M1
AII/1 Standard Wheel Orders All wheel orders given should be repeated by the helmsman and the officer of the watch should ensure that they are carried out correctly and immediately. All wheel orders should be held until countermanded. The helmsman should report immediately if the vessel does not answer the wheel. When there is concern that the helmsman is inattentive s/he should be questioned: "What is your heading ?" And s/he should respond: "My heading is ... degrees." Order Meaning 1. Midships Rudder to be held in the fore and aft position. 2. Port / starboard five 5° of port / starboard rudder to be held. 3. Port / starboard ten 10°of port / starboard rudder to be held. 4. Port / starboard fifteen 15°of port / starboard rudder to be held. 5. Port / starboard twenty 20° of port / starboard rudder to be held. 6. Port / starboard twenty-five 25°of port / starboard rudder to be held. 7. Hard -a-port / starboard Rudder to be held fully over to port / starboard. 8. Nothing to port/starboard Avoid allowing the vessel’s head to go to port/starboard . 9.Meet her Check the swing of the vessel´s head in a turn. 10. Steady Reduce swing as rapidly as possible. 11. Ease to five / ten Reduce amount of rudder to 5°/10°/15°/20° and hold. / fifteen / twenty 12. Steady as she goes Steer a steady course on the compass headin g indicated at the time of the order. The helmsman is to repeat the order and call out the compass heading on receiving the order. -

An Introduction to the Design of Marine Propulsors
https://ntrs.nasa.gov/search.jsp?R=19750003133 2020-03-19T20:37:53+00:00Z An Introduction to the Design of Marine Propulsors ~ I I ROBERTE. HENDERSON The Pennsylvania State University This paper is intended to serve as an introduction to the area of marine propulsor design hy presenting a brief summary of current design methods. In addition, n list of reports dealing with the dchsign of open propellers, ducted propellers or pumpjets, and waterjets is presented together with a discussion of some of the major problems facing today’s marine propulsor designer. The propulsion of a marine or waterbornc vehicle represrnts one of the earlier applications of turbomachinrry design. For the past 100 years, ships have been propelled by the open screw propeller while in more recent times the ducted propeller or pumpjet, the waterjet, and various novel forms of the open screw propeller have been employed. The simi- larities which exist between thcsr inark propulsors and the axial-flow compressors of the modern aircraft engine or the liquid pumps employed in today’s space rockets are obvious. One would think, therefore, that the methods employed in the design of thew types of turbomachinery would be similar. Indeed, the principles employed and the problems encountered in the designing of these turbomachines are similar. However, the design methods employed are many times quite different. It is hoped that, through this symposium on design methods, not only can data on methods for the design of improved marine propulsors be presented, but there can be an exchange of the design methods used for various types of turbomachinery, and this will provide solutions in common problem areas.