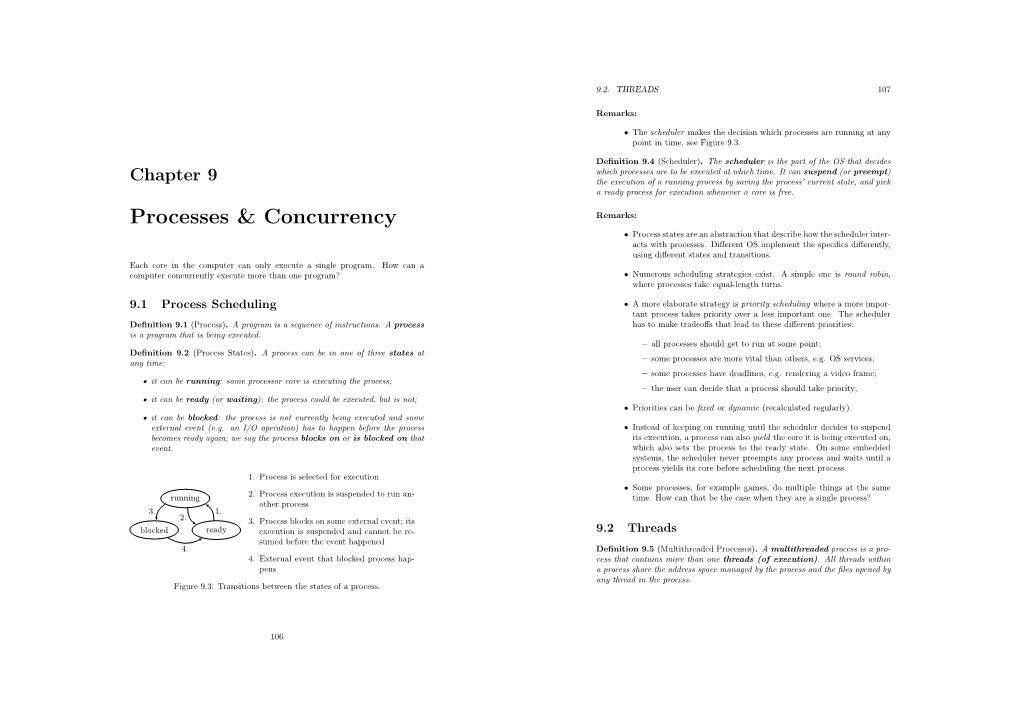
Processes & Concurrency
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Case for High Performance Computing with Virtual Machines
A Case for High Performance Computing with Virtual Machines Wei Huangy Jiuxing Liuz Bulent Abaliz Dhabaleswar K. Panday y Computer Science and Engineering z IBM T. J. Watson Research Center The Ohio State University 19 Skyline Drive Columbus, OH 43210 Hawthorne, NY 10532 fhuanwei, [email protected] fjl, [email protected] ABSTRACT in the 1960s [9], but are experiencing a resurgence in both Virtual machine (VM) technologies are experiencing a resur- industry and research communities. A VM environment pro- gence in both industry and research communities. VMs of- vides virtualized hardware interfaces to VMs through a Vir- fer many desirable features such as security, ease of man- tual Machine Monitor (VMM) (also called hypervisor). VM agement, OS customization, performance isolation, check- technologies allow running different guest VMs in a phys- pointing, and migration, which can be very beneficial to ical box, with each guest VM possibly running a different the performance and the manageability of high performance guest operating system. They can also provide secure and computing (HPC) applications. However, very few HPC ap- portable environments to meet the demanding requirements plications are currently running in a virtualized environment of computing resources in modern computing systems. due to the performance overhead of virtualization. Further, Recently, network interconnects such as InfiniBand [16], using VMs for HPC also introduces additional challenges Myrinet [24] and Quadrics [31] are emerging, which provide such as management and distribution of OS images. very low latency (less than 5 µs) and very high bandwidth In this paper we present a case for HPC with virtual ma- (multiple Gbps). -

A Light-Weight Virtual Machine Monitor for Blue Gene/P
A Light-Weight Virtual Machine Monitor for Blue Gene/P Jan Stoessx{1 Udo Steinbergz1 Volkmar Uhlig{1 Jonathan Appavooy1 Amos Waterlandj1 Jens Kehnex xKarlsruhe Institute of Technology zTechnische Universität Dresden {HStreaming LLC jHarvard School of Engineering and Applied Sciences yBoston University ABSTRACT debugging tools. CNK also supports I/O only via function- In this paper, we present a light-weight, micro{kernel-based shipping to I/O nodes. virtual machine monitor (VMM) for the Blue Gene/P Su- CNK's lightweight kernel model is a good choice for the percomputer. Our VMM comprises a small µ-kernel with current set of BG/P HPC applications, providing low oper- virtualization capabilities and, atop, a user-level VMM com- ating system (OS) noise and focusing on performance, scal- ponent that manages virtual BG/P cores, memory, and in- ability, and extensibility. However, today's HPC application terconnects; we also support running native applications space is beginning to scale out towards Exascale systems of directly atop the µ-kernel. Our design goal is to enable truly global dimensions, spanning companies, institutions, compatibility to standard OSes such as Linux on BG/P via and even countries. The restricted support for standardized virtualization, but to also keep the amount of kernel func- application interfaces of light-weight kernels in general and tionality small enough to facilitate shortening the path to CNK in particular renders porting the sprawling diversity applications and lowering OS noise. of scalable applications to supercomputers more and more a Our prototype implementation successfully virtualizes a bottleneck in the development path of HPC applications. -

Opportunities for Leveraging OS Virtualization in High-End Supercomputing
Opportunities for Leveraging OS Virtualization in High-End Supercomputing Kevin T. Pedretti Patrick G. Bridges Sandia National Laboratories∗ University of New Mexico Albuquerque, NM Albuquerque, NM [email protected] [email protected] ABSTRACT formance, making modest virtualization performance over- This paper examines potential motivations for incorporating heads viable. In these cases,the increased flexibility that vir- virtualization support in the system software stacks of high- tualization provides can be used to support a wider range end capability supercomputers. We advocate that this will of applications, to enable exascale co-design research and increase the flexibility of these platforms significantly and development, and provide new capabilities that are not pos- enable new capabilities that are not possible with current sible with the fixed software stacks that high-end capability fixed software stacks. Our results indicate that compute, supercomputers use today. virtual memory, and I/O virtualization overheads are low and can be further mitigated by utilizing well-known tech- The remainder of this paper is organized as follows. Sec- niques such as large paging and VMM bypass. Furthermore, tion 2 discusses previous work dealing with the use of virtu- since the addition of virtualization support does not affect alization in HPC. Section 3 discusses several potential areas the performance of applications using the traditional native where platform virtualization could be useful in high-end environment, there is essentially no disadvantage to its ad- supercomputing. Section 4 presents single node native vs. dition. virtual performance results on a modern Intel platform that show that compute, virtual memory, and I/O virtualization 1. -

A Virtual Machine Environment for Real Time Systems Laboratories
AC 2007-904: A VIRTUAL MACHINE ENVIRONMENT FOR REAL-TIME SYSTEMS LABORATORIES Mukul Shirvaikar, University of Texas-Tyler MUKUL SHIRVAIKAR received the Ph.D. degree in Electrical and Computer Engineering from the University of Tennessee in 1993. He is currently an Associate Professor of Electrical Engineering at the University of Texas at Tyler. He has also held positions at Texas Instruments and the University of West Florida. His research interests include real-time imaging, embedded systems, pattern recognition, and dual-core processor architectures. At the University of Texas he has started a new real-time systems lab using dual-core processor technology. He is also the principal investigator for the “Back-To-Basics” project aimed at engineering student retention. Nikhil Satyala, University of Texas-Tyler NIKHIL SATYALA received the Bachelors degree in Electronics and Communication Engineering from the Jawaharlal Nehru Technological University (JNTU), India in 2004. He is currently pursuing his Masters degree at the University of Texas at Tyler, while working as a research assistant. His research interests include embedded systems, dual-core processor architectures and microprocessors. Page 12.152.1 Page © American Society for Engineering Education, 2007 A Virtual Machine Environment for Real Time Systems Laboratories Abstract The goal of this project was to build a superior environment for a real time system laboratory that would allow users to run Windows and Linux embedded application development tools concurrently on a single computer. These requirements were dictated by real-time system applications which are increasingly being implemented on asymmetric dual-core processors running different operating systems. A real time systems laboratory curriculum based on dual- core architectures has been presented in this forum in the past.2 It was designed for a senior elective course in real time systems at the University of Texas at Tyler that combines lectures along with an integrated lab. -
Synchronization Spinlocks - Semaphores
CS 4410 Operating Systems Synchronization Spinlocks - Semaphores Summer 2013 Cornell University 1 Today ● How can I synchronize the execution of multiple threads of the same process? ● Example ● Race condition ● Critical-Section Problem ● Spinlocks ● Semaphors ● Usage 2 Problem Context ● Multiple threads of the same process have: ● Private registers and stack memory ● Shared access to the remainder of the process “state” ● Preemptive CPU Scheduling: ● The execution of a thread is interrupted unexpectedly. ● Multiple cores executing multiple threads of the same process. 3 Share Counting ● Mr Skroutz wants to count his $1-bills. ● Initially, he uses one thread that increases a variable bills_counter for every $1-bill. ● Then he thought to accelerate the counting by using two threads and keeping the variable bills_counter shared. 4 Share Counting bills_counter = 0 ● Thread A ● Thread B while (machine_A_has_bills) while (machine_B_has_bills) bills_counter++ bills_counter++ print bills_counter ● What it might go wrong? 5 Share Counting ● Thread A ● Thread B r1 = bills_counter r2 = bills_counter r1 = r1 +1 r2 = r2 +1 bills_counter = r1 bills_counter = r2 ● If bills_counter = 42, what are its possible values after the execution of one A/B loop ? 6 Shared counters ● One possible result: everything works! ● Another possible result: lost update! ● Called a “race condition”. 7 Race conditions ● Def: a timing dependent error involving shared state ● It depends on how threads are scheduled. ● Hard to detect 8 Critical-Section Problem bills_counter = 0 ● Thread A ● Thread B while (my_machine_has_bills) while (my_machine_has_bills) – enter critical section – enter critical section bills_counter++ bills_counter++ – exit critical section – exit critical section print bills_counter 9 Critical-Section Problem ● The solution should ● enter section satisfy: ● critical section ● Mutual exclusion ● exit section ● Progress ● remainder section ● Bounded waiting 10 General Solution ● LOCK ● A process must acquire a lock to enter a critical section. -

Introduction to Multi-Threading and Vectorization Matti Kortelainen Larsoft Workshop 2019 25 June 2019 Outline
Introduction to multi-threading and vectorization Matti Kortelainen LArSoft Workshop 2019 25 June 2019 Outline Broad introductory overview: • Why multithread? • What is a thread? • Some threading models – std::thread – OpenMP (fork-join) – Intel Threading Building Blocks (TBB) (tasks) • Race condition, critical region, mutual exclusion, deadlock • Vectorization (SIMD) 2 6/25/19 Matti Kortelainen | Introduction to multi-threading and vectorization Motivations for multithreading Image courtesy of K. Rupp 3 6/25/19 Matti Kortelainen | Introduction to multi-threading and vectorization Motivations for multithreading • One process on a node: speedups from parallelizing parts of the programs – Any problem can get speedup if the threads can cooperate on • same core (sharing L1 cache) • L2 cache (may be shared among small number of cores) • Fully loaded node: save memory and other resources – Threads can share objects -> N threads can use significantly less memory than N processes • If smallest chunk of data is so big that only one fits in memory at a time, is there any other option? 4 6/25/19 Matti Kortelainen | Introduction to multi-threading and vectorization What is a (software) thread? (in POSIX/Linux) • “Smallest sequence of programmed instructions that can be managed independently by a scheduler” [Wikipedia] • A thread has its own – Program counter – Registers – Stack – Thread-local memory (better to avoid in general) • Threads of a process share everything else, e.g. – Program code, constants – Heap memory – Network connections – File handles -
GT-Virtual-Machines
College of Design Virtual Machine Setup for CP 6581 Fall 2020 1. You will have access to multiple College of Design virtual machines (VMs). CP 6581 will require VMs with ArcGIS installed, and for class sessions we will start the semester using the K2GPU VM. You should open each VM available to you and check to see if ArcGIS is installed. 2. Here are a few general notes on VMs. a. Because you will be a new user when you first start a VM, you may be prompted to set up Microsoft Explorer, Microsoft Edge, Adobe Creative Suite, or other software. You can close these windows and set up specific software later, if you wish. b. Different VMs allow different degrees of customization. To customize right-click on an empty Desktop area and choose “Personalize”. Change your background to a solid color that’s a distinctive color so you can easily distinguish your virtual desktop from your local computer’s desktop. Some VMs will remember your desktop color, other VMs must be re-set at each login, other VMs won’t allow you to change the background color but may allow you to change a highlight color from the “Colors” item on the left menu just below “Background”. c. Your desktop will look exactly the same as physical computer’s desktop except for the small black rectangle at the middle of the very top of the VM screen. Click on the rectangle and a pop-down horizontal menu of VM options will appear. Here are two useful options. i. Preferences then File Access will allow you to grant VM access to your local computer’s drives and files. -

CSC 553 Operating Systems Multiple Processes
CSC 553 Operating Systems Lecture 4 - Concurrency: Mutual Exclusion and Synchronization Multiple Processes • Operating System design is concerned with the management of processes and threads: • Multiprogramming • Multiprocessing • Distributed Processing Concurrency Arises in Three Different Contexts: • Multiple Applications – invented to allow processing time to be shared among active applications • Structured Applications – extension of modular design and structured programming • Operating System Structure – OS themselves implemented as a set of processes or threads Key Terms Related to Concurrency Principles of Concurrency • Interleaving and overlapping • can be viewed as examples of concurrent processing • both present the same problems • Uniprocessor – the relative speed of execution of processes cannot be predicted • depends on activities of other processes • the way the OS handles interrupts • scheduling policies of the OS Difficulties of Concurrency • Sharing of global resources • Difficult for the OS to manage the allocation of resources optimally • Difficult to locate programming errors as results are not deterministic and reproducible Race Condition • Occurs when multiple processes or threads read and write data items • The final result depends on the order of execution – the “loser” of the race is the process that updates last and will determine the final value of the variable Operating System Concerns • Design and management issues raised by the existence of concurrency: • The OS must: – be able to keep track of various processes -

The Deadlock Problem
The deadlock problem More deadlocks mutex_t m1, m2; Same problem with condition variables void p1 (void *ignored) { • lock (m1); - Suppose resource 1 managed by c1, resource 2 by c2 lock (m2); - A has 1, waits on 2, B has 2, waits on 1 /* critical section */ c c unlock (m2); Or have combined mutex/condition variable unlock (m1); • } deadlock: - lock (a); lock (b); while (!ready) wait (b, c); void p2 (void *ignored) { unlock (b); unlock (a); lock (m2); - lock (a); lock (b); ready = true; signal (c); lock (m1); unlock (b); unlock (a); /* critical section */ unlock (m1); One lesson: Dangerous to hold locks when crossing unlock (m2); • } abstraction barriers! This program can cease to make progress – how? - I.e., lock (a) then call function that uses condition variable • Can you have deadlock w/o mutexes? • 1/15 2/15 Deadlocks w/o computers Deadlock conditions 1. Limited access (mutual exclusion): - Resource can only be shared with finite users. 2. No preemption: - once resource granted, cannot be taken away. Real issue is resources & how required • 3. Multiple independent requests (hold and wait): E.g., bridge only allows traffic in one direction - don’t ask all at once (wait for next resource while holding • - Each section of a bridge can be viewed as a resource. current one) - If a deadlock occurs, it can be resolved if one car backs up 4. Circularity in graph of requests (preempt resources and rollback). All of 1–4 necessary for deadlock to occur - Several cars may have to be backed up if a deadlock occurs. • Two approaches to dealing with deadlock: - Starvation is possible. -

Virtualizationoverview
VMWAREW H WHITEI T E PPAPERA P E R Virtualization Overview 1 VMWARE WHITE PAPER Table of Contents Introduction .............................................................................................................................................. 3 Virtualization in a Nutshell ................................................................................................................... 3 Virtualization Approaches .................................................................................................................... 4 Virtualization for Server Consolidation and Containment ........................................................... 7 How Virtualization Complements New-Generation Hardware .................................................. 8 Para-virtualization ................................................................................................................................... 8 VMware’s Virtualization Portfolio ........................................................................................................ 9 Glossary ..................................................................................................................................................... 10 2 VMWARE WHITE PAPER Virtualization Overview Introduction Virtualization in a Nutshell Among the leading business challenges confronting CIOs and Simply put, virtualization is an idea whose time has come. IT managers today are: cost-effective utilization of IT infrastruc- The term virtualization broadly describes the separation -

Fair K Mutual Exclusion Algorithm for Peer to Peer Systems ∗
Fair K Mutual Exclusion Algorithm for Peer To Peer Systems ∗ Vijay Anand Reddy, Prateek Mittal, and Indranil Gupta University of Illinois, Urbana Champaign, USA {vkortho2, mittal2, indy}@uiuc.edu Abstract is when multiple clients are simultaneously downloading a large multimedia file, e.g., [3, 12]. Finally applications k-mutual exclusion is an important problem for resource- where a service has limited computational resources will intensive peer-to-peer applications ranging from aggrega- also benefit from a k mutual exclusion primitive, preventing tion to file downloads. In order to be practically useful, scenarios where all the nodes of the p2p system simultane- k-mutual exclusion algorithms not only need to be safe and ously overwhelm the server. live, but they also need to be fair across hosts. We pro- The k mutual exclusion problem involves a group of pro- pose a new solution to the k-mutual exclusion problem that cesses, each of which intermittently requires access to an provides a notion of time-based fairness. Specifically, our identical resource called the critical section (CS). A k mu- algorithm attempts to minimize the spread of access time tual exclusion algorithm must satisfy both safety and live- for the critical resource. While a client’s access time is ness. Safety means that at most k processes, 1 ≤ k ≤ n, the time between it requesting and accessing the resource, may be in the CS at any given time. Liveness means that the spread is defined as a system-wide metric that measures every request for critical section access is satisfied in finite some notion of the variance of access times across a homo- time. -

Towards Gradually Typed Capabilities in the Pi-Calculus
Towards Gradually Typed Capabilities in the Pi-Calculus Matteo Cimini University of Massachusetts Lowell Lowell, MA, USA matteo [email protected] Gradual typing is an approach to integrating static and dynamic typing within the same language, and puts the programmer in control of which regions of code are type checked at compile-time and which are type checked at run-time. In this paper, we focus on the π-calculus equipped with types for the modeling of input-output capabilities of channels. We present our preliminary work towards a gradually typed version of this calculus. We present a type system, a cast insertion procedure that automatically inserts run-time checks, and an operational semantics of a π-calculus that handles casts on channels. Although we do not claim any theoretical results on our formulations, we demonstrate our calculus with an example and discuss our future plans. 1 Introduction This paper presents preliminary work on integrating dynamically typed features into a typed π-calculus. Pierce and Sangiorgi have defined a typed π-calculus in which channels can be assigned types that express input and output capabilities [16]. Channels can be declared to be input-only, output-only, or that can be used for both input and output operations. As a consequence, this type system can detect unintended or malicious channel misuses at compile-time. The static typing nature of the type system prevents the modeling of scenarios in which the input- output discipline of a channel is discovered at run-time. In these scenarios, such a discipline must be enforced with run-time type checks in the style of dynamic typing.