New Hydroacoustic Tools for Monitoring Migratory Fish Population. a Review
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Biodiversity of Arctic Marine Fishes: Taxonomy and Zoogeography
Mar Biodiv DOI 10.1007/s12526-010-0070-z ARCTIC OCEAN DIVERSITY SYNTHESIS Biodiversity of arctic marine fishes: taxonomy and zoogeography Catherine W. Mecklenburg & Peter Rask Møller & Dirk Steinke Received: 3 June 2010 /Revised: 23 September 2010 /Accepted: 1 November 2010 # Senckenberg, Gesellschaft für Naturforschung and Springer 2010 Abstract Taxonomic and distributional information on each Six families in Cottoidei with 72 species and five in fish species found in arctic marine waters is reviewed, and a Zoarcoidei with 55 species account for more than half list of families and species with commentary on distributional (52.5%) the species. This study produced CO1 sequences for records is presented. The list incorporates results from 106 of the 242 species. Sequence variability in the barcode examination of museum collections of arctic marine fishes region permits discrimination of all species. The average dating back to the 1830s. It also incorporates results from sequence variation within species was 0.3% (range 0–3.5%), DNA barcoding, used to complement morphological charac- while the average genetic distance between congeners was ters in evaluating problematic taxa and to assist in identifica- 4.7% (range 3.7–13.3%). The CO1 sequences support tion of specimens collected in recent expeditions. Barcoding taxonomic separation of some species, such as Osmerus results are depicted in a neighbor-joining tree of 880 CO1 dentex and O. mordax and Liparis bathyarcticus and L. (cytochrome c oxidase 1 gene) sequences distributed among gibbus; and synonymy of others, like Myoxocephalus 165 species from the arctic region and adjacent waters, and verrucosus in M. scorpius and Gymnelus knipowitschi in discussed in the family reviews. -

Herrings and Shads of North America
1 American Currents Vol. 29, No. 2 Herrings and Shads of North America: Diversity, Natural History, Conservation, and Aquarium Care Christopher Scharpf 1107 Argonne Drive, Baltimore, MD 21218 [email protected] “. it is a fish of crowds, not one to occurring in Atlantic Coast drainages of the U.S. and Canada, strike out much of its own.” and two species ranging from the Gulf Coast upwards — John Hay through the Mississippi Basin into Iowa, Wisconsin, and Minnesota. Some Atlantic species occur far outside their ilvery, slab-sided, and generically fish-shaped, native ranges, usually in lakes and reservoirs, either from members of the family Clupeidae—herrings, intentional introductions to provide forage for stocked game- shads, sardines, pilchards, sprats, and menhaden fish, or by passage through manmade waterways.1 The S (collectively called clupeids)—are easily overlooked American shad (A. sapidissima) was planted into California’s in favor of more charismatic or distinctively assembled fishes. Sacramento River in 1871 and has spread up the Pacific But their role as an abundant food source for higher predators, Coast and across the Bering Strait into the Kamchatka including man and fishes eaten by man, makes them impos- Peninsula. Apparently, temperature anomalies and ocean cur- sible to ignore. Pound for pound, clupeids are arguably the rents caused by El Niños have proven to be conducive to most important fishes in the world. American shad reproduction (Ebbesmeyer and Hinrichsen, 1997), as have the reduced-current areas created by dams Diversity and Distribution (Hinrichsen and Ebbesmeyer, 1998). Today, the largest American shad run occurs in the Columbia River of the Nature, recognizing a good thing, wisely made clupeids Pacific Northwest. -

Section Provides an Overview of the Species, Distribution, and Occurrence of Fishes That Are Either Resident Or Migratory Through the GOA TMAA
3.6 Fish GULF OF ALASKA NAVY TRAINING ACTIVITIES EIS/OEIS FINAL (MARCH 2011) 3.6 FISH 3.6.1 Affected Environment For purposes of this Environmental Impact Statement/Overseas Environmental Impact Statement (EIS/OEIS), the Region of Influence (ROI) for fish is the Gulf of Alaska (GOA) Temporary Maritime Activities Area (TMAA). The TMAA is more than 12 nautical miles (nm) (22 kilometers [km]) from the closest point of land and is therefore outside of United States (U.S.) territorial seas. Thus, this section provides an overview of the species, distribution, and occurrence of fishes that are either resident or migratory through the GOA TMAA. A brief discussion of Essential Fish Habitat (EFH) is provided in Section 3.6.1.2 of this EIS/OEIS and a brief discussion of federally listed threatened and endangered fish species protected under the Endangered Species Act (ESA) in the TMAA is provided in Section 3.6.1.3. In the GOA, the majority of the fishery resources are found along the broad continental shelf ecosystem (Richardson and Erickson 2005). Important marine species include salmonids (Chinook, coho, chum, pink and sockeye salmon, and steelhead), Pacific halibut, shelf and slope groundfish (walleye pollock, Pacific, sablefish, rockfishes, rex sole, Dover sole, arrowtooth flounder), dungeness crab, and scallops (U.S. Department of Commerce, National Oceanic and Atmospheric Administration [USDC, NOAA] 2005; Richardson and Erickson 2005). The Pacific high seas salmon are arguably the most important living marine resource within the GOA. Currently the GOA supports habitats of “endangered” and “threatened” populations of high seas salmon (Chinook, coho, chum, and sockeye salmon, and steelhead) (Section 3.6.1.3) (NMFS 2005b, 2005c). -

Eoalosa Janvieri Gen. Et Sp. Nov., a New Clupeid Fish (Teleostei
PalZ DOI 10.1007/s12542-017-0378-0 RESEARCH PAPER Eoalosa janvieri gen. et sp. nov., a new clupeid fish (Teleostei, Clupeiformes) from the Eocene of Monte Bolca, Italy 1 2 Giuseppe Marrama` • Giorgio Carnevale Received: 10 December 2016 / Accepted: 20 June 2017 Ó The Author(s) 2017. This article is an open access publication Abstract Fishes of the family Clupeidae are extremely zur Kenntnis der Diversita¨t clupeoider Fische im Eoza¨n abundant in the Eocene fossiliferous limestone of Monte von Monte Bolca bei. Bolca representing the most common group from this celebrated locality. A new clupeid from the Pesciara site, Schlu¨sselwo¨rter Eoalosa janvieri gen. et sp. nov. Á Eoalosa janvieri gen. et sp. nov., is described. The new Clupeidae Á Pala¨obiodiversita¨t Á Konservat-Lagersta¨tte Á taxon exhibits a unique combination of characters sup- Ypresium porting its recognition as a new genus and species of clu- peid fish that is tentatively placed in the subfamily Alosinae. The description of this new taxon improves our Introduction knowledge of the diversity of clupeoid fishes in the Eocene of Monte Bolca. Fishes of the suborder Clupeoidei (herrings, sardines, shads, sprats, round herrings, and anchovies) represent one Keywords Eoalosa janvieri gen. et sp. nov. Á Clupeidae Á of the most abundant and widespread groups of teleosts. Palaeobiodiversity Á Konservat-Lagersta¨tte Á Ypresian They currently comprise 91 genera and more than 400 extant species (Nelson et al. 2016) arranged in four fami- Kurzfassung Fische aus der Familie der Clupeidae sind lies (Chirocentridae, Clupeidae, Engraulidae, Pristigasteri- sehr ha¨ufig in den fossilfu¨hrenden eoza¨nen Schichten von dae), with a fossil record dating back to the Early Monte Bolca anzutreffen und repra¨sentieren die ha¨ufigste Cretaceous (Figueiredo 2009). -

Atlantic Menhaden Brevoortia Tyrannus
Supplemental Volume: Species of Conservation Concern SC SWAP 2015 Atlantic Menhaden Brevoortia tyrannus Contributor (2014): Joseph C. Ballenger (SCDNR) From ASMFC (2012) DESCRIPTION Atlantic menhaden, a Clupeoid fish of interest to fisheries, is one of the most common forage fish species encountered in South Carolina estuarine and coastal waters. It is estuarine-dependent with juveniles utilizing estuarine nursery areas (Whitehead 1985). Taxonomy and Basic Description Atlantic menhaden, Brevoortia tyrannus (Latrobe 1802), belong to the herring family, Clupeidae, and are similar in appearance to the alewife and shad. In particular, they belong to the subfamily Alosinae (a.k.a. the shads), which includes 7 genera, 2 of which (Brevoortia and Alosa) have representatives in the western Atlantic (Whitehead 1985). The genus Brevoortia includes a total of 6 species: B. aurea, B. gunteri, B. patronus, B. pectinata, B. smithi, and B. tyrannus. B. tyrannus and B. smithi (yellowfin menhaden) overlap in distribution off the East coast of the United States, particularly off Florida (Whitehead 1985). In areas of overlap, B. tyrannus and B. smithi will hybridize, with hybrids being common (Dahlberg 1970). Atlantic menhaden have a bluish body above with silvery sides possessing a reddish luster and fins tinged with pale yellow and edged in black (ASMFC 1981). They are distinguished from other Clupeidae by a large head, an upper jaw with distinct median notch, no teeth, pectinated scales, the location of the dorsal fin over the interval between the pelvic and anal fins, the pelvic fin with a rounded hind margin, modified pre-dorsal scales, and a compressed body with bony scutes along the belly (ASMFC 1981; Whitehead 1985). -

Alosa Aestivalis) Ecological Risk Screening Summary
Blueback Herring (Alosa aestivalis) Ecological Risk Screening Summary U.S. Fish and Wildlife Service, web version – 03/30/2018 Photo: Ellen Edmonson and Hugh Crisp. Public Domain. Available: http://www.eol.org/data_objects/26919566. 1 Native Range and Status in the United States Native Range From NatureServe (2013): “Range encompasses the North American Atlantic coast from Nova Scotia to the St. Johns River, Florida.” Status in the United States From NatureServe (2013): “Range encompasses the North American Atlantic coast from Nova Scotia to the St. Johns River, Florida. The species has been introduced in reservoirs in several states, and in the Tennessee River system in Tennessee (Bozeman and Van Den Avyle 1989, Page and Burr 2011).” 1 From Fuller et al. (2016): “Blueback Herring was first collected in Lake Ontario in 1995. It has been collected from the Tennessee River in Georgia and Tennessee (Rassmussen 1998). Currently established in Tellico and Norris Reservoirs in Tennessee (J. Negus, personal communication). Established in Oneida Lake, the Oswego River in Minetto, Lake Champlain, and the upper Mohawk River upstream of Cohoes Falls, New York (Greeley 1935; Limburg et al. 2001; D. MacNeill and R. Owens, personal communication). In North Carolina, Blueback Herring were introduced into the Savannah, Broad, and Yadkin drainages, and into nonnative areas of the Cape Fear and Roanoke drainages (Menhinick 1991; Jenkins and Burkhead 1994). It has been introduced to an unspecified location in the Chesapeake Bay basin in Pennsylvania (Christmas et al. 2000). Blueback Herring were accidently introduced into Lakes Jocassee and Keowee, South Carolina, between 1972-1974 (Prince and Barwick 1981); they have now been collected from most reservoirs in the Savannah River system and in Lake Murray (Rohde et al. -

Final Environmental Analysis of A
ENVIRONMENTAL ASSESSMENT Issuance of an Incidental Harassment Authorization to the Scripps Institution of Oceanography to Take Marine Mammals by Harassment Incidental to a Low-Energy Marine Geophysical Survey in the South-Eastern Pacific Ocean, May, 2012 May 2012 AGENCY: U.S. Department of Commerce, National Oceanic and Atmospheric Administration National Marine Fisheries Service, Office of Protected Resources 1315 East West Highway Silver Spring, MD 20910 RESPONSIBLE OFFICIAL: Helen M. Golde, Acting Director, Office of Protected Resources FOR INFORMATION CONTACT: Office of Protected Resources National Marine Fisheries Service 1315 East West Highway Silver Spring, MD 20910 301-427-8401 LOCATION: In the Exclusive Economic Zone of Chile, approximately 50 kilometers off the coast, in the area approximately 34° to 35° South, and 72° to 74° West. ABSTRACT: This Environmental Assessment analyzes the environmental impacts of the National Marine Fisheries Service‘s proposal to issue an Incidental Harassment Authorization to the Scripps Institution of Oceanography for the taking, by Level B harassment, of small numbers of marine mammals, incidental to conducting a marine geophysical (seismic) survey in the south-eastern Pacific Ocean, May, 2012. 1 1. CHAPTER 1 – PURPOSE AND NEED FOR ACTION 1.1 DESCRIPTION OF PROPOSED ACTION NMFS has received an application from Scripps Institution of Oceanography (SIO), a part of the University of California San Diego (UCSD), for an Incidental Harassment Authorization (IHA) to take marine mammals, by Level B harassment, incidental to conducting a marine geophysical (seismic) survey in the south-eastern Pacific Ocean in the Exclusive Economic Zone (EEZ) of Chile, May, 2012. SIO‘s seismic survey activities, which have the potential to cause marine mammals to be behaviorally disturbed, warrant an incidental take authorization from NMFS under section 101(a)(5)(D) of the Marine Mammal Protection Act of 1972, as amended (MMPA; 16 U.S.C. -

Alewife (Alosa Pseudoharengus) ERSS
Alewife (Alosa pseudoharengus) Ecological Risk Screening Summary U.S. Fish & Wildlife Service, August 2014 Revised, February 2019 Web Version, 7/19/2019 Image: Duane Raver/USFWS. Usage rights granted to U.S. Fish & Wildlife Service by creator. 1 Native Range and Status in the United States Native Range From Froese and Pauly (2019a): “North America: Atlantic coast from Red Bay, Labrador in Canada to South Carolina in USA; many landlocked populations exist. […] Native to Lake Ontario; […]” Status in the United States From Froese and Pauly (2019a): “[…]; introduced into other Great Lakes via Welland Canal (first taken in Lake Erie in 1931). Introduced elsewhere, including New River in West Virginia and Virginia, and upper Tennessee River system in Tennessee, USA.” 1 From Fuller et al. (2019a): “Established in many states and throughout the Great Lakes. Introduction to the Youghiogheny River [Pennsylvania] was unsuccessful (Hendricks et al. 1979).” “Although there is a report of two small alewives taken from the Colorado River, Texas (Bean 1882), we believe this record is in error. Bean (1882) reported that the specimens were sent to Professor Baird at the National Museum. However, a query of the museum's holdings did not return these specimens. We believe the fish are more likely either misidentified A. chrysochloris or A. sapidissima. Alosa sapidissima were stocked in the Colorado River in 1874 (Bean 1882).” From Fuller et al. (2019b): “Alewife were introduced into Colorado (Minckley 1973); Georgia (Dahlberg and Scott 1971); Lake Michigan, Illinois (Miller 1957; Smith 1979; Phillips et al. 1982; Emery 1985); Lake Michigan (Miller 1957; Phillips et al. -

A Molecular Analysis of Atlantic Menhaden (Brevoortia Tyrannus) Stock Structure
W&M ScholarWorks Dissertations, Theses, and Masters Projects Theses, Dissertations, & Master Projects 2008 A Molecular Analysis of Atlantic Menhaden (Brevoortia tyrannus) Stock Structure Abigail J. Lynch College of William and Mary - Virginia Institute of Marine Science Follow this and additional works at: https://scholarworks.wm.edu/etd Part of the Fresh Water Studies Commons, Molecular Biology Commons, and the Oceanography Commons Recommended Citation Lynch, Abigail J., "A Molecular Analysis of Atlantic Menhaden (Brevoortia tyrannus) Stock Structure" (2008). Dissertations, Theses, and Masters Projects. Paper 1539617866. https://dx.doi.org/doi:10.25773/v5-rw45-j035 This Thesis is brought to you for free and open access by the Theses, Dissertations, & Master Projects at W&M ScholarWorks. It has been accepted for inclusion in Dissertations, Theses, and Masters Projects by an authorized administrator of W&M ScholarWorks. For more information, please contact [email protected]. A Molecular Analysis of Atlantic Menhaden (Brevoortia tyrannus) Stock Structure A Thesis Presented to The Faculty of the School of Marine Science The College of William and Mary in Virginia In Partial Fulfillment Of the Requirements for the Degree of Master of Science by Abigail J. Lynch 2008 APPROVAL SHEET This thesis is submitted in partial fulfillment of the requirements for the degree of Master of Science i igail J. Lynch Approved by the Committee, July 21, 2008 John Ei Graves, Ph.D. Committee Chairman/Advisor cD owell, Ph.IJNJan R. cDowell, Ph.IJNJan Robert -

Atlantic Coast Diadromous Fish Habitat: American Eel Anguilla Rostrata a Review of Utilization, Threats, Recommendations for Conservation, And
Atlantic States Marine Fisheries Commission Alewife Alosa pseudoharengus Atlantic Coast Diadromous Fish Habitat: American eel Anguilla rostrata A Review of Utilization, Threats, Recommendations for Conservation, and American shad Alosa sapidissima Research Needs Atlantic sturgeon Acipenser oxyrhynchus oxyrinchus Hickory shad Alosa mediocris Habitat Management Series #9 January 2009 Striped bass Morone saxatilis Working towards healthy, self-sustaining populations of all Atlantic coast fish species or successful restoration well in progress by the year 2015 Blueback herring Alosa aestivalis ASMFC Habitat Management Series #9 Atlantic Coast Diadromous Fish Habitat: A Review of Utilization, Threats, Recommendations for Conservation, and Research Needs Prepared by: Karen E. Greene National Oceanic and Atmospheric Administration Fisheries Service Sustainable Fisheries Division Silver Spring, Maryland [email protected] Jennifer L. Zimmerman West Virginia University Morgantown, West Virginia [email protected] R. Wilson Laney United States Fish and Wildlife Service South Atlantic Fisheries Office Raleigh, North Carolina [email protected] and Jessie C. Thomas-Blate Atlantic States Marine Fisheries Commission Washington, District of Columbia [email protected] Atlantic Coast Diadromous Fish Habitat ii ACKNOWLEDGEMENTS We thank the many people that provided feedback and information for this document. Many ASMFC Habitat Committee members and Habitat Coordinators, both past and present, provided valuable input throughout the various iterations of this document over the past nine years, and for that we are very grateful. Without assistance from state and federal habitat coordinators, and academia, much of the information contained in this document would not have been published. They generously offered numerous articles and unpublished resources in addition to personal insight, which were invaluable contributions to this document. -
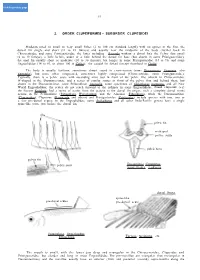
2. Order Clupeiformes - Suborder Clupeoidei
click for previous page 19 2. ORDER CLUPEIFORMES - SUBORDER CLUPEOIDEI Moderate-sized or small or very small fishes (2 to 100 cm standard length) with no spines in the fins, the dorsal fin single and short (11 to 23 finrays) and usually near the midpoint of the body (further back in Chirocentridae and some Pristigasteridae, the latter including Raconda without a dorsal fin); the Pelvic fins small (6 to 10 finrays), a little before, under or a little behind the dorsal fin base (but absent in some Pristigasteridae); the anal fin usually short or moderate (10 to 36 finrays), but longer in some Pristigasteridae (34 to 93) and some Engraulididae (14 to 81, or about 100 in Coilia); the caudal fin forked (except rhomboid in Coilia). The body is usually fusiform, sometimes almost round in cross-section (some Dussumieria, Etrumeus, also Engraulis), but more often compressed, sometimes highly compressed (Chirocentridae, some Pristigasteridae). Typically, there is a pelvic scute with ascending arms just in front of the pelvic fins (absent in Chirocentridae; W-shaped in the Dussumieriinae, and a series of similar scutes in front of the pelvic fins and behind them, but absent in the Dussumieriinae, some Pellonulinae, Engraulis, some specimens of Stolephorus purpureus and all New World Engraulididae; the scutes do not reach forward to the isthmus in some Engraulididae. Fossil clupeoids (e.g. the Eocene Knightia) had a series of scutes from the occiput to the dorsal fin origin; such a complete dorsal series occurs in the Pellonulinae (Potamalosa, Hyperlophus) and the Alosinae (Ethmidium), while the Dorosomatinae (Clupanodon), Clupeinae (Harengula and others) and Pristigasteridae (Pristigaster) include species with one, two or a few pre-dorsal scutes; in the Engraulididae, some Stolephorus and all other Indo-Pacific genera have a single spine-like scute just before the dorsal fin. -

Integrative Pinpointing of Clupeids from the S-West Atlantic Ocean
ISSN: 2408-5464 Vol. 7 (1), pp. 494-505, January, 2019 ©Global Science Research Journals Global Journal of Fisheries and Aquaculture Author(s) retain the copyright of this article. http://www.globalscienceresearchjournals.org/ Full Length Research Paper Integrative pinpointing of clupeids from the S-West Atlantic Ocean 1 1 2 Tony Suarez, Martíns Tiago, Gozalez Silver 1Higher educational institution in Guadalajara, Mexico 2Universidad Autónoma de Yucatán. Accepted 15 December, 2016 In the Southwestern Atlantic Ocean, several described species of Clupeiforms overlap their geographical distribution in the coastal areas from Rio Grande do Sul (Southern Brazil) to Bahía Blanca (Argentina) and the Río de la Plata estuary. Larvae and juveniles of the SW Atlantic menhaden Brevoortia aurea are very difficult to discriminate from those of other clupeids belonging to the genera Platanichthys and Ramnogaster inhabiting the same environments. Here we implemented phylogenetic analyses based on mitochondrial cytochrome b sequences and morphometric and osteological studies to achieve unambiguous species recognition in different ontogenetic stages of six endemic species of Clupeiformes from the Southwestern Atlantic Ocean. All phylogenetic analyses based on the cytochrome b gene yielded a robust support to the existence of highly structured and monophyletic groups conforming clupeiforms taxa. These monophyletic entities were consistent with major groups accessed through the first two principal components (PCs) from morphometric variation among taxa. Both approaches resulted in accurated and complementary tools for the individual assignment in clades and groups within Clupeiformes during different ontogenetic stages in their life cycle. The detection of species-specific spawning and nursery areas through accurated methodological approaches of identification constitute a prerequisite for a sustainable management in pelagic fisheries.