Approximating the Crossing Number of Toroidal Graphs
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-
Some Conjectures in Chromatic Topological Graph Theory Joan P
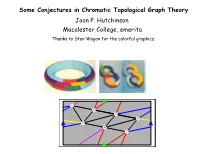
Some Conjectures in Chromatic Topological Graph Theory Joan P. Hutchinson Macalester College, emerita Thanks to Stan Wagon for the colorful graphics. Ñ 1 2 3 4 5 6 7 ALMOST FOUR-COLORING ON SURFACES: ALMOST FOUR-COLORING ON SURFACES: #1. M.O. Albertson’s favorite CONJECTURE (1980): All vertices of a triangulation of the torus can be 4-col- ored except for at most three vertices. Motivation: Every graph on the torus can be 7-colored, and every 7-chromatic toroidal graph contains K7, a trian- gulation of the torus. Every 6-chromatic toroidal graph contains one of four graphs. [Thomassen 1994] The list for 5-chromatic toroidal graphs is infinite... An affirmative answer to this conjecture implies the Four Color Theorem. In Jensen & Toft, Graph Coloring Problems, Albertson’s Four-Color Problem. CONJECTURE: For every surface S, there is an integer f HSL such that all but f HSL vertices of a graph embed- dable on S can be 4-colored. TWO & THREE-COLORING ON SURFACES #2. The “easiest” coloring result states that every plane graph can be two-colored provided every face is bounded by an even number of edges. What is true on surfaces? Locally bipartite (aka evenly embedded) graphs are those embedded on a surface with all faces bounded by an even number of edges. There is a Heawood/Ringel type theorem for locally bipar- tite graphs on surfaces. The more “modern” question asks about locally planar, locally bipartite graphs on surfaces: The more “modern” question asks about locally planar, locally bipartite graphs on surfaces: Locally planar (Albertson & Stromquist 1980) means that all noncontractible cycles are long, as long as needed for the conjecture/question/theorem at hand. -

Biplanar Graphs: a Survey
ComputersMath.Applic.Vol. 34, No. 11,pp. 1-8, 1997 Pergamon Copyright(FJ1997ElsevierScienceLtd @ Printedin GreatBritain.All rightsreserved 0898-1221/97$17.00+ 0.00 PII: S0898-1221(97)00214-9 Biplanar Graphs: A Survey L. W, BEINEKE Departmentof MathematicalSciences IndianaUniversity-PurdueUniversity Fort Wayne, IN 46805,U.S.A. Abstract—A graphis calledbiplanarif it is the unionof two planargraphs. In this survey, we presenta varietyof reeultson biplanargraphs,somespecialfamiliesof suchgraphs,and some generalizations. Keywords-planar graphs,Biplanargraphs,Thickness,Doublylineargraphs,Visibilitygraphs. 1. BACKGROUND In 1986, as part of the commemorationof the 250thanniversaryof graph theory and the cele- bration of the 65thbirthday of FrankHarary,we gave a surveyof graph thicknessand related concepts [1]. The presentpaper is the resultof an invitationto up-datethat work. The thrust of this paper will be ratherdifferenthowever,focusingon “biplanar”graphs,those that are the union of just two planargraphs. In fact, the thicknessof a graphhas its originsin this question: which complete graphscan be expressedas the unionof two planargraphs? We begin with a few historical comments. In the early 1960’s, Selfridgeobserved that no graphwith elevenverticescan havea planarcomplement.This is easilyseen,sincethe complete graph Kll has fifty-fiveedges, but Euler’s polyhedronformulaimpliesthat a planar graph of order 11 can have no more than twenty-sevenedges. Consequently,KU cannot be the union of two planar graphs. On the other hand, as Figure 1 shows, there are planargraphs of order 8 whose complementsare also planar. (In fact, the examplein Figure 1 is self-complementary.) For graphs of order 9, the questionturned out to be quite difficultto answer. In the event, the answerwas shownto be negative,by Battle, Harary,and Kodama [2]and independentlyby Tutte [3]. -
![Arxiv:2011.14609V1 [Math.CO] 30 Nov 2020 Vertices in Different Partition Sets Are Linked by a Hamilton Path of This Graph](https://docslib.b-cdn.net/cover/8087/arxiv-2011-14609v1-math-co-30-nov-2020-vertices-in-di-erent-partition-sets-are-linked-by-a-hamilton-path-of-this-graph-1418087.webp)
Arxiv:2011.14609V1 [Math.CO] 30 Nov 2020 Vertices in Different Partition Sets Are Linked by a Hamilton Path of This Graph
Symmetries of the Honeycomb toroidal graphs Primož Šparla;b;c aUniversity of Ljubljana, Faculty of Education, Ljubljana, Slovenia bUniversity of Primorska, Institute Andrej Marušič, Koper, Slovenia cInstitute of Mathematics, Physics and Mechanics, Ljubljana, Slovenia Abstract Honeycomb toroidal graphs are a family of cubic graphs determined by a set of three parameters, that have been studied over the last three decades both by mathematicians and computer scientists. They can all be embedded on a torus and coincide with the cubic Cayley graphs of generalized dihedral groups with respect to a set of three reflections. In a recent survey paper B. Alspach gathered most known results on this intriguing family of graphs and suggested a number of research problems regarding them. In this paper we solve two of these problems by determining the full automorphism group of each honeycomb toroidal graph. Keywords: automorphism; honeycomb toroidal graph; cubic; Cayley 1 Introduction In this short paper we focus on a certain family of cubic graphs with many interesting properties. They are called honeycomb toroidal graphs, mainly because they can be embedded on the torus in such a way that the corresponding faces are hexagons. The usual definition of these graphs is purely combinatorial where, somewhat vaguely, the honeycomb toroidal graph HTG(m; n; `) is defined as the graph of order mn having m disjoint “vertical” n-cycles (with n even) such that two consecutive n-cycles are linked together by n=2 “horizontal” edges, linking every other vertex of the first cycle to every other vertex of the second one, and where the last “vertcial” cycle is linked back to the first one according to the parameter ` (see Section 3 for a precise definition). -

A Note on Vertex Arboricity of Toroidal Graphs Without 7-Cycles1
International Mathematical Forum, Vol. 11, 2016, no. 14, 679 - 686 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.12988/imf.2016.6672 A Note on Vertex Arboricity of Toroidal Graphs without 7-Cycles1 Haihui Zhang School of Mathematical Science, Huaiyin Normal University 111 Changjiang West Road Huaian, Jiangsu, 223300, P. R. China Copyright c 2016 Haihui Zhang. This article is distributed under the Creative Com- mons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Abstract The vertex arboricity ρ(G) of a graph G is the minimum number of subsets into which the vertex set V (G) can be partitioned so that each subset induces an acyclic graph. In this paper, it is shown that if G is a toroidal graph without 7-cycles, moreover, G contains no triangular and adjacent 4-cycles, then ρ(G) ≤ 2. Mathematics Subject Classification: Primary: 05C15; Secondary: 05C70 Keywords: vertex arboricity, toroidal graph, structure, cycle 1 Introduction All graphs considered in this paper are finite and simple. For a graph G we denote its vertex set, edge set, maximum degree and minimum degree by V (G), E(G), ∆(G) and δ(G), respectively. The vertex arboricity of a graph G, denoted by ρ(G), is the smallest number of subsets that the vertices of G can be partitioned into such that each subset 1Research was supported by NSFC (Grant No. 11501235) and NSFC Tianyuan foun- dation (Grant No. 11226285), the Natural Science Foundation of Jiangsu (Grant No. BK20140451), and the Natural Science Research Project of Ordinary Universities in Jiangsu (Grant No. -

Graph Embedding Algorithms
Graph Embedding Algorithms by ANDREI GAGARIN A Thesis Submitted to the Faculty of Graduate Studies in Partial Fblfillment of the Requirements for the Degree of DOCTOR OF PHILOSOPHY Department of Computer Science University of Manitoba Winnipeg, Manitoba, Canada @ Copyright by Andrei Gagarin, 2003 June 11, 2003 THE UNIVERSITY OF MANITOBA FACULTY OF GRADUATE STUDIES *t*** COPYRIGHT PERMISSION PAGE GRAPH EMBEDDING ALGORITHMS BY ANDREI GAGARIN A Thesis/Practicum submitted to the Faculty of Graduate Studies of The University of Manitoba in partial fulfillment of the requirements of the degree of Doctor of Philosophy ANDREI GAGARIN @ 2OO3 permission has been granted to the Library of The University of Ma¡ritoba to lend or sell copies of this thesis/practicum, to the National Library of Canada to microfilm this thesis and to lend or sell copies of the film, and to University Microfilm Inc. to publish an abstract of this thesis/practicum. The author reserves other publication rights, and neither this thesis/practicum nor exteruive extracts from it may be printed or otherwise reproduced without the author's written permission. Abstract A topologi,cal surface,S can be obtained from the sphere by adding a number of handles and/or cross-caps. Any topological surface can be represented as a polygon whose sides are identified in pairs. The projectiue plane can be represented as a circular disk with opposite pairs of points on its boundary identified. The torus can be represented as a rectangle with opposite sides of its boundary identified. is possible to Given a graph G and a topological surface ^9, we ask whether it draw the graph on the surface without edge crossings. -

A 4-Color Theorem for Toroidal Graphs 83
proceedings of the american mathematical society Volume 34, Number 1, July 1972 A 4-COLOR THEOREM FOR TOROIDAL GRAPHS HUDSON V. KRONK1 AND ARTHUR T. WHITE2 Abstract. It is well known that any graph imbedded in the torus has chromatic number at most seven, and that seven is attained by the graph K-,. In this note we show that any toroidal graph con- taining no triangles has chromatic number at most four, and produce an example attaining this upper bound. The results are then extended for arbitrary girth. 1. Introduction. The chromatic number of a graph G, denoted by %(G), is the minimum number of colors that can be assigned to the points of G so that adjacent points are colored differently. The Four Color Conjecture is that any planar graph has chromatic number at most four; the Five Color Theorem states that %(G)_5, if G is planar. Grötzsch [2] has shown that a planar graph having no triangles has chromatic number at most three; the cycle C5 shows that this bound cannot be improved. It is well known that any toroidal graph has chromatic number at most seven, and that this bound is attained by the complete graph K7. In this note we find an upper bound for the chromatic number of toroidal graphs having no triangles, and show that this bound is best possible. We also consider toroidal graphs of arbitrary girth. A connected graph G is said to be n-line-critical if %(G)=n but, for any line e of G, x(G—e)=n—l. -

Book Embedding of Toroidal Bipartite Graphs
Book embedding of toroidal bipartite graphs Atsuhiro Nakamoto,∗ Katsuhiro Otayand Kenta Ozekiz Abstract Endo [5] proved that every toroidal graph has a book embedding with at most seven pages. In this paper, we prove that every toroidal bipartite graph has a book embedding with at most five pages. In order to do so, we prove that every bipartite torus quadrangulation Q with n vertices admits two disjoint essential simple closed curves cutting the torus into two annuli so that each of the two annuli contains a spanning connected subgraph of Q with exactly n edges. Keywords: torus, bipartite graph, book embedding, quadrangulation 1 Introduction A book embedding of a graph G is to put the vertices along the spine (a segment) and each edge of G on a single page (a half-plane with the spine as its boundary) so that no two edges intersect transversely in the same page. We say that a graph G is k-page embeddable if G has a book embedding with at most k pages. The pagenumber (or sometimes called stack number or book thickness) of a graph G is the minimum of k such that G is k-page embeddable. This notion was first introduced by Bernhart and Kainen [1]. Since a book embedding is much concerned with theoretical computer science including VLSI design [3, 15], we are interested in bounding the pagenumber. Actually, we can find a number of researches giving upper bounds of the pagenumber for some graph classes, for example, complete bipartite graphs [6, 13] and k-trees [4, 8, 17]. -

When Is a Graph Planar?
When is a graph planar? Theorem(Euler, 1758) If a plane multigraph G with k components has n vertices, e edges, and f faces, then n − e + f = 1 + k: Corollary If G is a simple, planar graph with n(G) ≥ 3, then e(G) ≤ 3n(G) − 6. If G is also triangle-free, then e(G) ≤ 2n(G) − 4. Corollary K5 and K3;3 are non-planar. The subdivision of edge e = xy is the replacement of e with a new vertex z and two new edges xz and zy. The graph H0 is a subdivision of H, if one can obtain H0 from H by a series of edge subdivisions. Vertices of H0 with degree at least three are called branch vertices. Theorem(Kuratowski, 1930) A graph G is planar iff G does not contain a subdivision of K5 or K3;3. 1 Kuratowski's Theorem Theorem(Kuratowski, 1930) A graph G is planar iff G does not contain a subdivision of K5 or K3;3. Proof. A Kuratowski subgraph of G is a subgraph of G that is a subdivision of K5 or K3;3. A minimal nonplanar graph is a nonplanar graph such that every proper subgraph is planar. A counterexample to Kuratowski’s Theorem constitu- tes a nonplanar graph that does not contain any Ku- ratowski subgraph. Kuratowski’s Theorem follows from the following Main Lemma and Theorem. 2 The spine of the proof Main Lemma. If G is a graph with fewest edges among counterexamples, then G is 3-connected. Lemma 1. Every minimal nonplanar graph is 2-connected. -

Planar Graph - Wikipedia, the Free Encyclopedia Page 1 of 7
Planar graph - Wikipedia, the free encyclopedia Page 1 of 7 Planar graph From Wikipedia, the free encyclopedia In graph theory, a planar graph is a graph that can be Example graphs embedded in the plane, i.e., it can be drawn on the plane in such a way that its edges intersect only at their endpoints. In other Planar Nonplanar words, it can be drawn in such a way that no edges cross each other. A planar graph already drawn in the plane without edge intersections is called a plane graph or planar embedding of Butterfly graph the graph . A plane graph can be defined as a planar graph with a mapping from every node to a point in 2D space, and from K5 every edge to a plane curve, such that the extreme points of each curve are the points mapped from its end nodes, and all curves are disjoint except on their extreme points. Plane graphs can be encoded by combinatorial maps. It is easily seen that a graph that can be drawn on the plane can be drawn on the sphere as well, and vice versa. The equivalence class of topologically equivalent drawings on K3,3 the sphere is called a planar map . Although a plane graph has The complete graph external unbounded an or face, none of the faces of a planar K4 is planar map have a particular status. A generalization of planar graphs are graphs which can be drawn on a surface of a given genus. In this terminology, planar graphs have graph genus 0, since the plane (and the sphere) are surfaces of genus 0. -

Bounded Combinatorial Width and Forbidden Substructures
Bounded Combinatorial Width and Forbidden Substructures by Michael John Dinneen BS University of Idaho MS University of Victoria A Dissertation Submitted in Partial Fulllment of the Requirements for the Degree of DOCTOR OF PHILOSOPHY in the Department of Computer Science We accept this dissertation as conforming to the required standard Dr Michael R Fellows Sup ervisor Department of Computer Science Dr Hausi A Muller Department Memb er Department of Computer Science Dr Jon C Muzio DepartmentMemb er Department of Computer Science Dr Gary MacGillivray Outside Memb er Department of Math and Stats Dr Arvind Gupta External Examiner Scho ol of Computing Science Simon Fraser University c MICHAEL JOHN DINNEEN University of Victoria All rights reserved This dissertation may not b e repro duced in whole or in part by mimeograph or other means without the p ermission of the author ii Sup ervisor M R Fellows Abstract A substantial part of the history of graph theory deals with the study and classi cation of sets of graphs that share common prop erties One predominant trend is to characterize graph families by sets of minimal forbidden graphs within some partial ordering on the graphs For example the famous Kuratowski Theorem classies the planar graph family bytwo forbidden graphs in the top ological partial order Most if not all of the current approaches for nding these forbidden substructure characterizations use extensive and sp ecialized case analysis Thus until now for a xed graph familythistyp e of mathematical theorem proving often required -

A Survey of Graphs with Known Or Bounded Crossing Numbers
AUSTRALASIAN JOURNAL OF COMBINATORICS Volume XY(2) (2020), Pages 1–89 A Survey of Graphs with Known or Bounded Crossing Numbers Kieran Clancy Michael Haythorpe∗ Alex Newcombe College of Science and Engineering Flinders University 1284 South Road, Tonsley Australia 5042 [email protected] [email protected] [email protected] Abstract We present, to the best of the authors’ knowledge, all known results for the (planar) crossing numbers of specific graphs and graph families. The results are separated into various categories; specifically, results for gen- eral graph families, results for graphs arising from various graph products, and results for recursive graph constructions. Keywords: Crossing numbers, Conjectures, Survey Contents 1 Introduction 4 1.1 AsteriskedResults ............................ 7 arXiv:1901.05155v4 [math.CO] 7 Jul 2020 1.2 GeneralResults.............................. 7 1.3 CrossingCriticalGraphs ......................... 8 2 Specific Graphs and Graph Families 8 2.1 CompleteMultipartiteGraphs. 8 2.1.1 Complete Bipartite Graphs . 9 2.1.2 Complete Tripartite Graphs . 10 2.1.3 Complete4-partiteGraphs. 12 2.1.4 Complete5-partiteGraphs. 13 ∗ Corresponding author ISSN: 2202-3518 c The author(s). Released under the CC BY-ND 4.0 International License K. CLANCY ET AL. / AUSTRALAS. J. COMBIN. XY (2) (2020), 1–89 2 2.1.5 Complete6-partiteGraphs. 13 2.1.6 Complete Bipartite Graphs Minus an Edge . 13 2.2 CompleteGraphs ............................. 14 2.2.1 CompleteGraphsMinusanEdge . 15 2.2.2 Complete Graphs Minus a Cycle . 15 2.3 CirculantGraphs ............................. 16 2.4 GeneralizedPetersenGraphs. 19 2.5 PathPowers................................ 22 2.6 Kn¨odelGraphs .............................. 23 2.7 FlowerSnarks............................... 23 2.8 Hexagonal Graph H3,n ......................... -

A Large Set of Torus Obstructions and How They Were Discovered
A large set of torus obstructions and how they were discovered Wendy Myrvold ∗ Jennifer Woodcock Department of Computer Science Department of Computer Science University of Victoria University of Victoria Victoria, BC, Canada Victoria, BC, Canada [email protected] [email protected] Submitted: Oct 11, 2013; Accepted: Jan 7, 2018; Published: Jan 25, 2018 Mathematics Subject Classifications: 05C83, 05C10, 05C85 Abstract We outline the progress made so far on the search for the complete set of torus obstructions and also consider practical algorithms for torus embedding and their implementations. We present the set of obstructions that are known to-date and give a brief history of how these graphs were found. We also describe a nice algorithm for embedding graphs on the torus which we used to verify previous results and add to the set of torus obstructions. Although it is still exponential in the order of the graph, the algorithm presented here is relatively simple to describe and implement and fast-in-practice for small graphs. It parallels the popular quadratic planar embedding algorithm of Demoucron, Malgrange, and Pertuiset. Keywords: Embedding graphs on surfaces, obstructions for surfaces, torus embed- ding. 1 Introduction A (topological) obstruction for a surface S is a graph G with minimum degree at least three that is not embeddable on S but for every edge e of G, G−e (G with edge e deleted) is embeddable on S.A minor-order obstruction G has the additional property that for every edge e of G, G · e (G with edge e contracted) is embeddable on S.