Thread Safety, Issues and Guidelines
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Pdp11-40.Pdf
processor handbook digital equipment corporation Copyright© 1972, by Digital Equipment Corporation DEC, PDP, UNIBUS are registered trademarks of Digital Equipment Corporation. ii TABLE OF CONTENTS CHAPTER 1 INTRODUCTION 1·1 1.1 GENERAL ............................................. 1·1 1.2 GENERAL CHARACTERISTICS . 1·2 1.2.1 The UNIBUS ..... 1·2 1.2.2 Central Processor 1·3 1.2.3 Memories ........... 1·5 1.2.4 Floating Point ... 1·5 1.2.5 Memory Management .............................. .. 1·5 1.3 PERIPHERALS/OPTIONS ......................................... 1·5 1.3.1 1/0 Devices .......... .................................. 1·6 1.3.2 Storage Devices ...................................... .. 1·6 1.3.3 Bus Options .............................................. 1·6 1.4 SOFTWARE ..... .... ........................................... ............. 1·6 1.4.1 Paper Tape Software .......................................... 1·7 1.4.2 Disk Operating System Software ........................ 1·7 1.4.3 Higher Level Languages ................................... .. 1·7 1.5 NUMBER SYSTEMS ..................................... 1-7 CHAPTER 2 SYSTEM ARCHITECTURE. 2-1 2.1 SYSTEM DEFINITION .............. 2·1 2.2 UNIBUS ......................................... 2-1 2.2.1 Bidirectional Lines ...... 2-1 2.2.2 Master-Slave Relation .. 2-2 2.2.3 Interlocked Communication 2-2 2.3 CENTRAL PROCESSOR .......... 2-2 2.3.1 General Registers ... 2-3 2.3.2 Processor Status Word ....... 2-4 2.3.3 Stack Limit Register 2-5 2.4 EXTENDED INSTRUCTION SET & FLOATING POINT .. 2-5 2.5 CORE MEMORY . .... 2-6 2.6 AUTOMATIC PRIORITY INTERRUPTS .... 2-7 2.6.1 Using the Interrupts . 2-9 2.6.2 Interrupt Procedure 2-9 2.6.3 Interrupt Servicing ............ .. 2-10 2.7 PROCESSOR TRAPS ............ 2-10 2.7.1 Power Failure .............. -

Embedded C Programming I (Ecprogrami)
To our customers, Old Company Name in Catalogs and Other Documents On April 1st, 2010, NEC Electronics Corporation merged with Renesas Technology Corporation, and Renesas Electronics Corporation took over all the business of both companies. Therefore, although the old company name remains in this document, it is a valid Renesas Electronics document. We appreciate your understanding. Renesas Electronics website: http://www.renesas.com April 1st, 2010 Renesas Electronics Corporation Issued by: Renesas Electronics Corporation (http://www.renesas.com) Send any inquiries to http://www.renesas.com/inquiry. Notice 1. All information included in this document is current as of the date this document is issued. Such information, however, is subject to change without any prior notice. Before purchasing or using any Renesas Electronics products listed herein, please confirm the latest product information with a Renesas Electronics sales office. Also, please pay regular and careful attention to additional and different information to be disclosed by Renesas Electronics such as that disclosed through our website. 2. Renesas Electronics does not assume any liability for infringement of patents, copyrights, or other intellectual property rights of third parties by or arising from the use of Renesas Electronics products or technical information described in this document. No license, express, implied or otherwise, is granted hereby under any patents, copyrights or other intellectual property rights of Renesas Electronics or others. 3. You should not alter, modify, copy, or otherwise misappropriate any Renesas Electronics product, whether in whole or in part. 4. Descriptions of circuits, software and other related information in this document are provided only to illustrate the operation of semiconductor products and application examples. -
Lecture 4 Resource Protection and Thread Safety
Concurrency and Correctness – Resource Protection and TS Lecture 4 Resource Protection and Thread Safety 1 Danilo Piparo – CERN, EP-SFT Concurrency and Correctness – Resource Protection and TS This Lecture The Goals: 1) Understand the problem of contention of resources within a parallel application 2) Become familiar with the design principles and techniques to cope with it 3) Appreciate the advantage of non-blocking techniques The outline: § Threads and data races: synchronisation issues § Useful design principles § Replication, atomics, transactions and locks § Higher level concrete solutions 2 Danilo Piparo – CERN, EP-SFT Concurrency and Correctness – Resource Protection and TS Threads and Data Races: Synchronisation Issues 3 Danilo Piparo – CERN, EP-SFT Concurrency and Correctness – Resource Protection and TS The Problem § Fastest way to share data: access the same memory region § One of the advantages of threads § Parallel memory access: delicate issue - race conditions § I.e. behaviour of the system depends on the sequence of events which are intrinsically asynchronous § Consequences, in order of increasing severity § Catastrophic terminations: segfaults, crashes § Non-reproducible, intermittent bugs § Apparently sane execution but data corruption: e.g. wrong value of a variable or of a result Operative definition: An entity which cannot run w/o issues linked to parallel execution is said to be thread-unsafe (the contrary is thread-safe) 4 Danilo Piparo – CERN, EP-SFT Concurrency and Correctness – Resource Protection and TS To Be Precise: Data Race Standard language rules, §1.10/4 and /21: • Two expression evaluations conflict if one of them modifies a memory location (1.7) and the other one accesses or modifies the same memory location. -

Operating Systems What Is an Operating System Real-Time
Operating Systems Babak Kia Adjunct Professor Boston University College of Engineering Email: bkia -at- bu.edu ENG SC757 - Advanced Microprocessor Design What is an Operating System z Operating System handles • Memory Addressing & Management • Interrupt & Exception Handling • Process & Task Management • File System • Timing • Process Scheduling & Synchronization z Examples of Operating Systems • RTOS – Real-Time Operating System • Single-user, Single-task: example PalmOS • Single-user, Multi-task: MS Windows and MacOS • Multi-user, Multi-task: UNIX 2 Real-Time Operating Systems z Operating systems come in two flavors, real-time versus non real-time z The difference between the two is characterized by the consequences which result if functional correctness and timing parameters are not met in the case of real-time operating systems z Real-time operating systems themselves have two varieties, soft real-time systems and hard real- time systems z Examples of real-time systems: • Food processing • Engine Controls • Anti-lock breaking systems 3 1 Soft versus Hard Real-Time z In a soft real-time system, tasks are completed as fast as possible without having to be completed within a specified timeframe z In a hard real-time operating system however, not only must tasks be completed within the specified timeframe, but they must also be completed correctly 4 Foreground/Background Systems z The simplest forms of a non real-time operating systems are comprised of super-loops and are called foreground/background systems z Essentially this is an application -

Clojure, Given the Pun on Closure, Representing Anything Specific
dynamic, functional programming for the JVM “It (the logo) was designed by my brother, Tom Hickey. “It I wanted to involve c (c#), l (lisp) and j (java). I don't think we ever really discussed the colors Once I came up with Clojure, given the pun on closure, representing anything specific. I always vaguely the available domains and vast emptiness of the thought of them as earth and sky.” - Rich Hickey googlespace, it was an easy decision..” - Rich Hickey Mark Volkmann [email protected] Functional Programming (FP) In the spirit of saying OO is is ... encapsulation, inheritance and polymorphism ... • Pure Functions • produce results that only depend on inputs, not any global state • do not have side effects such as Real applications need some changing global state, file I/O or database updates side effects, but they should be clearly identified and isolated. • First Class Functions • can be held in variables • can be passed to and returned from other functions • Higher Order Functions • functions that do one or both of these: • accept other functions as arguments and execute them zero or more times • return another function 2 ... FP is ... Closures • main use is to pass • special functions that retain access to variables a block of code that were in their scope when the closure was created to a function • Partial Application • ability to create new functions from existing ones that take fewer arguments • Currying • transforming a function of n arguments into a chain of n one argument functions • Continuations ability to save execution state and return to it later think browser • back button 3 .. -
Reentrant Code
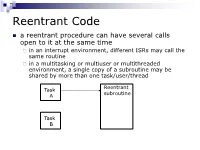
Reentrant Code a reentrant procedure can have several calls open to it at the same time in an interrupt environment, different ISRs may call the same routine in a multitasking or multiuser or multithreaded environment, a single copy of a subroutine may be shared by more than one task/user/thread Reentrant Task subroutine A Task B Reentrant Code Characteristics requirements: 1. any parameters or local variables must be on the stack frame 2. registers may be used for parameters and local variables but must be saved on or restored from the stack at beginning/end of the subroutine 3. guarantee that each call of the subroutine will create a separate stack frame to maintain data integrity 4. no self-modifying code Recursion recursive code must be reentrant recursive reentrant but reentrant recursive e.g. calculating 3! using recursion main move.w number,D0 pass the number jsr fact start recursive rtn move.w D0,result store the factorial stop #$2700 number dc.w 3 result ds.w 1 fact link A6,#-2 Stack structure move.w D0,-2(A6) subq.w #1,D0 bne push move.w -2(A6),D0 bra return push jsr fact mulu -2(A6),D0 return unlk A6 rts end main SP ->/////// A much more complex example: X: array [0..30] of words Y: longword Z, ALPHA, N: byte call order is S/R demo(X, Y, Z, ALPHA, N ) N is passed/returned by value, all others are passed by reference demo(X[w:31], Y[l], Z[b], ALPHA[b], N[b]) main CLR.W D2 zero entire word MOVE.B N,D2 N to low byte MOVE.W D2,-(SP) N on stack PEA ALPHA push arguments PEA Z in reverse order PEA Y PEA X JSR demo call -
Java Concurrency in Practice
Java Concurrency in practice Chapters: 1,2, 3 & 4 Bjørn Christian Sebak ([email protected]) Karianne Berg ([email protected]) INF329 – Spring 2007 Chapter 1 - Introduction Brief history of concurrency Before OS, a computer executed a single program from start to finnish But running a single program at a time is an inefficient use of computer hardware Therefore all modern OS run multiple programs (in seperate processes) Brief history of concurrency (2) Factors for running multiple processes: Resource utilization: While one program waits for I/O, why not let another program run and avoid wasting CPU cycles? Fairness: Multiple users/programs might have equal claim of the computers resources. Avoid having single large programs „hog“ the machine. Convenience: Often desirable to create smaller programs that perform a single task (and coordinate them), than to have one large program that do ALL the tasks What is a thread? A „lightweight process“ - each process can have many threads Threads allow multiple streams of program flow to coexits in a single process. While a thread share process-wide resources like memory and files with other threads, they all have their own program counter, stack and local variables Benefits of threads 1) Exploiting multiple processors 2) Simplicity of modeling 3) Simplified handling of asynchronous events 4) More responsive user interfaces Benefits of threads (2) Exploiting multiple processors The processor industry is currently focusing on increasing number of cores on a single CPU rather than increasing clock speed. Well-designed programs with multiple threads can execute simultaneously on multiple processors, increasing resource utilization. -

AN10381 Nesting of Interrupts in the LPC2000 Rev
AN10381 Nesting of interrupts in the LPC2000 Rev. 01 — 6 June 2005 Application note Document information Info Content Keywords nested, reentrant, interrupts, LPC2000 Abstract Details on reentrant interrupt handlers and code examples for the same is provided Philips Semiconductors AN10381 Nesting of interrupts in the LPC2000 Revision history Rev Date Description 01 20050606 Initial version Contact information For additional information, please visit: http://www.semiconductors.philips.com For sales office addresses, please send an email to: [email protected] © Koninklijke Philips Electronics N.V. 2005. All rights reserved. Application note Rev. 01 — 6 June 2005 2 of 14 Philips Semiconductors AN10381 Nesting of interrupts in the LPC2000 1. Introduction This application note provides code examples for effectively handling reentrant interrupt handlers in the LPC2000 devices. The following organization is been adopted for this application note. 1. Interrupt handling overview 2. Nesting of Interrupts 3. Code examples It is assumed for this application note, that the user is familiar with the ARM7TDMI-S architecture. Also, for code examples relating to simple interrupt handling using FIQ and IRQ, please refer to the AN10254_1 application note available online. All the code examples provided in this application note were built on the Keil MicroVision3 ARM compiler (an evaluation version of which is free for download at www.keil.com) 2. Interrupt handling overview 2.1 Interrupt levels in the ARM7 core The ARM7 processor supports two levels of interrupts: Interrupt Request (IRQ) and Fast Interrupt Request (FIQ). ARM recommends only one interrupt source to be classified as an FIQ. All other interrupt sources could be classified as IRQ’s and they could be programmed for reentrancy. -
Threads, IPC, and Synchronization CS 111 Operating Systems Peter Reiher
Operating System Principles: Threads, IPC, and Synchronization CS 111 Operating Systems Peter Reiher CS 111 Lecture 7 Fall 2016 Page 1 Outline • Threads • Interprocess communications • Synchronization – Critical sections – Asynchronous event completions CS 111 Lecture 7 Fall 2016 Page 2 Threads • Why not just processes? • What is a thread? • How does the operating system deal with threads? CS 111 Lecture 7 Fall 2016 Page 3 Why Not Just Processes? • Processes are very expensive – To create: they own resources – To dispatch: they have address spaces • Different processes are very distinct – They cannot share the same address space – They cannot (usually) share resources • Not all programs require strong separation – Multiple activities working cooperatively for a single goal CS 111 – Mutually trusting elements of a system Lecture 7 Fall 2016 Page 4 What Is a Thread? • Strictly a unit of execution/scheduling – Each thread has its own stack, PC, registers – But other resources are shared with other threads • Multiple threads can run in a process – They all share the same code and data space – They all have access to the same resources – This makes the cheaper to create and run • Sharing the CPU between multiple threads – User level threads (with voluntary yielding) CS 111 – Scheduled system threads (with preemption) Lecture 7 Fall 2016 Page 5 When Should You Use Processes? • To run multiple distinct programs • When creation/destruction are rare events • When running agents with distinct privileges • When there are limited interactions and shared resources • To prevent interference between executing interpreters • To firewall one from failures of the other CS 111 Lecture 7 Fall 2016 Page 6 When Should You Use Threads? • For parallel activities in a single program • When there is frequent creation and destruction • When all can run with same privileges • When they need to share resources • When they exchange many messages/signals • When you don’t need to protect them from each other CS 111 Lecture 7 Fall 2016 Page 7 Processes vs. -

C/C++ Thread Safety Analysis
C/C++ Thread Safety Analysis DeLesley Hutchins Aaron Ballman Dean Sutherland Google Inc. CERT/SEI Email: [email protected] Email: [email protected] Email: [email protected] Abstract—Writing multithreaded programs is hard. Static including MacOS, Linux, and Windows. The analysis is analysis tools can help developers by allowing threading policies currently implemented as a compiler warning. It has been to be formally specified and mechanically checked. They essen- deployed on a large scale at Google; all C++ code at Google is tially provide a static type system for threads, and can detect potential race conditions and deadlocks. now compiled with thread safety analysis enabled by default. This paper describes Clang Thread Safety Analysis, a tool II. OVERVIEW OF THE ANALYSIS which uses annotations to declare and enforce thread safety policies in C and C++ programs. Clang is a production-quality Thread safety analysis works very much like a type system C++ compiler which is available on most platforms, and the for multithreaded programs. It is based on theoretical work analysis can be enabled for any build with a simple warning on race-free type systems [3]. In addition to declaring the flag: −Wthread−safety. The analysis is deployed on a large scale at Google, where type of data ( int , float , etc.), the programmer may optionally it has provided sufficient value in practice to drive widespread declare how access to that data is controlled in a multithreaded voluntary adoption. Contrary to popular belief, the need for environment. annotations has not been a liability, and even confers some Clang thread safety analysis uses annotations to declare benefits with respect to software evolution and maintenance. -
CS 33 Week 8 Section 1G, Spring 2015 Prof
CS 33 Week 8 Section 1G, Spring 2015 Prof. Eggert (TA: Eric Kim) v1.0 Announcements ● Midterm 2 scores out now ○ Check grades on my.ucla.edu ○ Mean: 60.7, Std: 15 Median: 61 ● HW 5 due date updated ○ Due: May 26th (Tuesday) ● Lab 4 released soon ○ OpenMP Lab ○ Tutorial on OpenMP ■ http://openmp.org/mp-documents/omp-hands-on-SC08.pdf Overview ● More concurrency ● File I/O ● MT 2 Example: sum int result = 0; void sum_n(int n) { Suppose Louis if (n == 0) { Reasoner tries to result = n; make this code } else { thread safe... sum_n(n-1); result = result + n; } } Example: fib Question: Is there anything wrong with this code? int result = 0; sem_t s; // sem_init(&s,1); void sum_n(int n) { if (n == 0) { P(&s); result = n; V(&s); } else { P(&s); Answer: Yes, deadlock! sum_n(5) calls sum_n(n-1); sum_n(4), but sum_n(4) can't acquire result = result + n; mutex. sum_n(5) can't make progress V(&s); without sum_n(4) - thread is stuck. } } Thread-safe functions Definition: A function is thread-safe if functions correctly during simultaneous execution by multiple threads. [http: //stackoverflow.com/questions/261683/what-is-meant-by-thread-safe-code] Alt: In computer programming, thread-safe describes a program portion or routine that can be called from multiple programming threads without unwanted interaction between the threads. [http://whatis.techtarget.com/definition/thread-safe] Thread-safe functions Typically achieve thread-safety by mechanisms: - Synchronization (ie semaphores/mutexes) - Careful handling of shared data "To write code that will run stably for weeks takes extreme paranoia." (Not actually said by Nixon) Reentrant Functions A "stronger" version of thread-safe (in a sense). -

Programming Clojure Second Edition
Extracted from: Programming Clojure Second Edition This PDF file contains pages extracted from Programming Clojure, published by the Pragmatic Bookshelf. For more information or to purchase a paperback or PDF copy, please visit http://www.pragprog.com. Note: This extract contains some colored text (particularly in code listing). This is available only in online versions of the books. The printed versions are black and white. Pagination might vary between the online and printer versions; the content is otherwise identical. Copyright © 2010 The Pragmatic Programmers, LLC. All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form, or by any means, electronic, mechanical, photocopying, recording, or otherwise, without the prior consent of the publisher. The Pragmatic Bookshelf Dallas, Texas • Raleigh, North Carolina Many of the designations used by manufacturers and sellers to distinguish their products are claimed as trademarks. Where those designations appear in this book, and The Pragmatic Programmers, LLC was aware of a trademark claim, the designations have been printed in initial capital letters or in all capitals. The Pragmatic Starter Kit, The Pragmatic Programmer, Pragmatic Programming, Pragmatic Bookshelf, PragProg and the linking g device are trade- marks of The Pragmatic Programmers, LLC. Every precaution was taken in the preparation of this book. However, the publisher assumes no responsibility for errors or omissions, or for damages that may result from the use of information (including program listings) contained herein. Our Pragmatic courses, workshops, and other products can help you and your team create better software and have more fun.