Lecture Notes on Decompilation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Fill Your Boots: Enhanced Embedded Bootloader Exploits Via Fault Injection and Binary Analysis
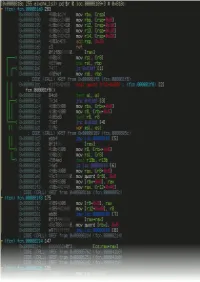
IACR Transactions on Cryptographic Hardware and Embedded Systems ISSN 2569-2925, Vol. 2021, No. 1, pp. 56–81. DOI:10.46586/tches.v2021.i1.56-81 Fill your Boots: Enhanced Embedded Bootloader Exploits via Fault Injection and Binary Analysis Jan Van den Herrewegen1, David Oswald1, Flavio D. Garcia1 and Qais Temeiza2 1 School of Computer Science, University of Birmingham, UK, {jxv572,d.f.oswald,f.garcia}@cs.bham.ac.uk 2 Independent Researcher, [email protected] Abstract. The bootloader of an embedded microcontroller is responsible for guarding the device’s internal (flash) memory, enforcing read/write protection mechanisms. Fault injection techniques such as voltage or clock glitching have been proven successful in bypassing such protection for specific microcontrollers, but this often requires expensive equipment and/or exhaustive search of the fault parameters. When multiple glitches are required (e.g., when countermeasures are in place) this search becomes of exponential complexity and thus infeasible. Another challenge which makes embedded bootloaders notoriously hard to analyse is their lack of debugging capabilities. This paper proposes a grey-box approach that leverages binary analysis and advanced software exploitation techniques combined with voltage glitching to develop a powerful attack methodology against embedded bootloaders. We showcase our techniques with three real-world microcontrollers as case studies: 1) we combine static and on-chip dynamic analysis to enable a Return-Oriented Programming exploit on the bootloader of the NXP LPC microcontrollers; 2) we leverage on-chip dynamic analysis on the bootloader of the popular STM8 microcontrollers to constrain the glitch parameter search, achieving the first fully-documented multi-glitch attack on a real-world target; 3) we apply symbolic execution to precisely aim voltage glitches at target instructions based on the execution path in the bootloader of the Renesas 78K0 automotive microcontroller. -
Radare2 Book
Table of Contents introduction 1.1 Introduction 1.2 History 1.2.1 Overview 1.2.2 Getting radare2 1.2.3 Compilation and Portability 1.2.4 Compilation on Windows 1.2.5 Command-line Flags 1.2.6 Basic Usage 1.2.7 Command Format 1.2.8 Expressions 1.2.9 Rax2 1.2.10 Basic Debugger Session 1.2.11 Contributing to radare2 1.2.12 Configuration 1.3 Colors 1.3.1 Common Configuration Variables 1.3.2 Basic Commands 1.4 Seeking 1.4.1 Block Size 1.4.2 Sections 1.4.3 Mapping Files 1.4.4 Print Modes 1.4.5 Flags 1.4.6 Write 1.4.7 Zoom 1.4.8 Yank/Paste 1.4.9 Comparing Bytes 1.4.10 Visual mode 1.5 Visual Disassembly 1.5.1 2 Searching bytes 1.6 Basic Searches 1.6.1 Configurating the Search 1.6.2 Pattern Search 1.6.3 Automation 1.6.4 Backward Search 1.6.5 Search in Assembly 1.6.6 Searching for AES Keys 1.6.7 Disassembling 1.7 Adding Metadata 1.7.1 ESIL 1.7.2 Scripting 1.8 Loops 1.8.1 Macros 1.8.2 R2pipe 1.8.3 Rabin2 1.9 File Identification 1.9.1 Entrypoint 1.9.2 Imports 1.9.3 Symbols (exports) 1.9.4 Libraries 1.9.5 Strings 1.9.6 Program Sections 1.9.7 Radiff2 1.10 Binary Diffing 1.10.1 Rasm2 1.11 Assemble 1.11.1 Disassemble 1.11.2 Ragg2 1.12 Analysis 1.13 Code Analysis 1.13.1 Rahash2 1.14 Rahash Tool 1.14.1 Debugger 1.15 3 Getting Started 1.15.1 Registers 1.15.2 Remote Access Capabilities 1.16 Remoting Capabilities 1.16.1 Plugins 1.17 Plugins 1.17.1 Crackmes 1.18 IOLI 1.18.1 IOLI 0x00 1.18.1.1 IOLI 0x01 1.18.1.2 Avatao 1.18.2 R3v3rs3 4 1.18.2.1 .intro 1.18.2.1.1 .radare2 1.18.2.1.2 .first_steps 1.18.2.1.3 .main 1.18.2.1.4 .vmloop 1.18.2.1.5 .instructionset 1.18.2.1.6 -

Reverse Software Engineering As a Project-Based Learning Tool
Paper ID #33764 Reverse Software Engineering as a Project-Based Learning Tool Ms. Cynthia C. Fry, Baylor University CYNTHIA C. FRY is currently a Senior Lecturer of Computer Science at Baylor University. She worked at NASA’s Marshall Space Flight Center as a Senior Project Engineer, a Crew Training Manager, and the Science Operations Director for STS-46. She was an Engineering Duty Officer in the U.S. Navy (IRR), and worked with the Naval Maritime Intelligence Center as a Scientific/Technical Intelligence Analyst. She was the owner and chief systems engineer for Systems Engineering Services (SES), a computer systems design, development, and consultation firm. She joined the faculty of the School of Engineering and Computer Science at Baylor University in 1997, where she teaches a variety of engineering and computer science classes, she is the Faculty Advisor for the Women in Computer Science (WiCS), the Director of the Computer Science Fellows program, and is a KEEN Fellow. She has authored and co- authored over fifty peer-reviewed papers. Mr. Zachary Michael Steudel Zachary Steudel is a 2021 graduate of Baylor University’s computer science department. In his time at Baylor, he worked as a Teaching Assistant under Ms. Cynthia C. Fry. As part of the Teaching Assistant role, Zachary designed and created the group project for the Computer Systems course. Zachary Steudel worked as a Software Developer Intern at Amazon in the Summer of 2019, a Software Engineer Intern at Microsoft in the Summer of 2020, and begins his full-time career with Amazon in the summer of 2021 as a software engineer. -

Reassembleable Disassembling
Reassembleable Disassembling Shuai Wang, Pei Wang, and Dinghao Wu College of Information Sciences and Technology The Pennsylvania State University fszw175, pxw172, [email protected] Abstract struction level to enforce certain security policies. To ensure program control-flow integrity (CFI, meaning that Reverse engineering has many important applications in program execution is dictated to a predetermined control- computer security, one of which is retrofitting software flow graph) [1,4, 43, 17, 29, 37] without source code, the for safety and security hardening when source code is not original control-flow graph must be recovered from a bi- available. By surveying available commercial and aca- nary executable and the binary must be retrofitted with demic reverse engineering tools, we surprisingly found the CFI enforcement facility embedded [50, 49]. Sym- that no existing tool is able to disassemble executable bolic taint analysis [34] on binaries must recover assem- binaries into assembly code that can be correctly assem- bly code and data faithfully. The defending techniques bled back in a fully automated manner, even for simple against return-oriented programming (ROP) attacks also programs. Actually in many cases, the resulted disas- rely on binary analysis and reconstruction to identify and sembled code is far from a state that an assembler ac- eliminate ROP gadgets [44,9, 47, 22, 39]. cepts, which is hard to fix even by manual effort. This Despite the fact that many security hardening tech- has become a severe obstacle. People have tried to over- niques are highly dependent on reverse engineering, flex- come it by patching or duplicating new code sections for ible and easy-to-use binary manipulation itself remains retrofitting of executables, which is not only inefficient an unsolved problem. -

A Survey of Reverse Engineering Tools for the 32-Bit Microsoft Windows Environment
A Survey of Reverse Engineering Tools for the 32-Bit Microsoft Windows Environment RAYMOND J. CANZANESE, JR., MATTHEW OYER, SPIROS MANCORIDIS, and MOSHE KAM College of Engineering Drexel University, Philadelphia, PA, USA Reverse engineering is defined by Chikosfky and Cross as the process of analyzing a subject system to identify the system's components and their relationships, and to create representations of the system in another form or at a higher level of abstraction. The process of reverse engineering is accomplished using specific tools that, for the 32-bit Microsoft Windows environment, are categorized as hex editors, disassemblers/debuggers, decompilers, or related technologies such as code obfuscators, unpackers, and PE editors. An evaluation of each tool is provided that identifies its domain of applicability and usability. Categories and Subject Descriptors: A.1 [General]: Introductory and Survey; D.2.5 [Software Engineering]: Testing and Debugging General Terms: Security, Documentation Additional Key Words and Phrases: Reverse Engineering, Disassemblers, Debuggers, Decompilers, Code Obfuscators, PE Editors Unpackers, Hex Editors 1. INTRODUCTION 1.1 The Reverse Engineering Process Software engineers are sometimes asked to understand the behavior of a program given that program's binary executable file. If they have access to the appropriate reverse engineering tools, they might choose to adhere to the following process. First, a general disassembler/debugger is used to determine the basic functionality of the program. If disassembly and debugging shows that the binary code has been obfuscated, the next step would be to determine whether the obfuscator used is a common commercial obfuscator or a custom protection scheme. A PE editor would be used to make this determination. -

Implementing the UCSD PASCAL System on the MODCOMP Computer
TDA Progress Report 42-60 September and October 1960 Implementing the UCSD PASCAL System on the MODCOMP Computer T. Wolfe DSN Data Systems Section This article describes the UCSD PASCAL system developed by the University of California, San Diego, now available on the MODCOMP computer. The system includes a Pascal compiler and many useful utility programs. A BASIC compiler and a FORTRAN 77 compiler are also avatkble. There is currently a large amount of software availabie written in UCSD PASCAL, including a data base system, word processing systems and a MODULA compiler. I. Introduction Assembly language subroutines thus produced may also be called from either Pascal or FORTRAN. Currently the assem- The UCSD PASCAL* System is a complete interactive bler has not been modified to produce MODCOMP machine software development system consisting of an operating sys- code. A system library program may be used to build libraries tem, compilers (Pascal, BASIC, FORTRAN 77) two text of useful subroutines and the system linker used to link them editors (screen editor and line-oriented editor), a linker and to user programs. many useful utility programs. The system is written and main- tained in Pascal. The compiler generates code for an idealized processor known as the “pseudo-machine.” The “pseudo- Interpreters currently exist for Z80/8080, PDP 11 /LSI-1 1, code” (p-code) generated by the compiler is interpreted at 6800, 9900 and 6502 computers and are being developed for runtime by a program (known as the interpreter) which emu- other computers. Thus, software could be developed on an lates the pseudo-machine. -

Decompilation of Binary Programs
SOFTWARE—PRACTICE AND EXPERIENCE, VOL. 25(7), 811–829 (JULY 1995) Decompilation of Binary Programs CRISTINA CIFUENTES∗ AND K. JOHN GOUGH (email: cifuente@fit.qut.edu.au gough@fit.qut.edu.au) School of Computing Science, Queensland University of Technology, GPO Box 2434, Brisbane QLD 4001, Australia SUMMARY The structure of a decompiler is presented, along with a thorough description of the different modules that form part of a decompiler, and the type of analyses that are performed on the machine code to regenerate high-level language code. The phases of the decompiler have been grouped into three main modules: front-end, universal decompiling machine, and back-end. The front-end is a machine-dependent module that performs the loading, parsing and semantic analysis of the input program, as well as generating an intermediate representation of the program. The universal decompiling machine is a machine- and language-independent module that performs data and control flow analysis of the program based on the intermediate representation, and the program’s control flow graph. The back-end is a language-dependent module that deals with the details of the target high-level language. In order to increase the readability of the generated programs, a decompiling system has been imple- mented which integrates a decompiler, dcc, and an automatic signature generator, dccSign. Signatures for libraries and compilers are stored in a database that is read by the decompiler; thus, the generated programs can make use of known library names, such as WriteLn() and printf(). dcc is a decompiler for the Intel 80286 architecture and the DOS operating system. -

Native X86 Decompilation Using Semantics- Preserving Structural Analysis and Iterative Control-Flow Structuring Edward J
Native x86 Decompilation Using Semantics- Preserving Structural Analysis and Iterative Control-Flow Structuring Edward J. Schwartz, Carnegie Mellon University; JongHyup Lee, Korea National University of Transportation; Maverick Woo and David Brumley, Carnegie Mellon University This paper is included in the Proceedings of the 22nd USENIX Security Symposium. August 14–16, 2013 • Washington, D.C., USA ISBN 978-1-931971-03-4 Open access to the Proceedings of the 22nd USENIX Security Symposium is sponsored by USENIX Native x86 Decompilation using Semantics-Preserving Structural Analysis and Iterative Control-Flow Structuring Edward J. Schwartz JongHyup Lee Carnegie Mellon University Korea National University of Transportation Maverick Woo David Brumley Carnegie Mellon University Carnegie Mellon University Abstract in the literature assume access to source code. For in- stance, there are numerous source-based static vulnera- There are many security tools and techniques for analyz- bility finding tools such as KINT [40], RICH [9], and ing software, but many of them require access to source Coverity [6], but equivalent binary-only tools are scarce. code. We propose leveraging decompilation, the study In many security scenarios, however, access to source of recovering abstractions from compiled code, to apply code is simply not a reasonable assumption. Common existing source-based tools and techniques to compiled counterexamples include analyzing commercial off-the- programs. A decompiler should focus on two properties shelf software for vulnerabilities and reverse engineering to be used for security. First, it should recover abstractions malware. The traditional approach in security has been to as much as possible to minimize the complexity that must directly apply some form of low-level binary analysis that be handled by the security analysis that follows. -

V850 Series Development Environment Pamphlet
To our customers, Old Company Name in Catalogs and Other Documents On April 1st, 2010, NEC Electronics Corporation merged with Renesas Technology Corporation, and Renesas Electronics Corporation took over all the business of both companies. Therefore, although the old company name remains in this document, it is a valid Renesas Electronics document. We appreciate your understanding. Renesas Electronics website: http://www.renesas.com April 1st, 2010 Renesas Electronics Corporation Issued by: Renesas Electronics Corporation (http://www.renesas.com) Send any inquiries to http://www.renesas.com/inquiry. Notice 1. All information included in this document is current as of the date this document is issued. Such information, however, is subject to change without any prior notice. Before purchasing or using any Renesas Electronics products listed herein, please confirm the latest product information with a Renesas Electronics sales office. Also, please pay regular and careful attention to additional and different information to be disclosed by Renesas Electronics such as that disclosed through our website. 2. Renesas Electronics does not assume any liability for infringement of patents, copyrights, or other intellectual property rights of third parties by or arising from the use of Renesas Electronics products or technical information described in this document. No license, express, implied or otherwise, is granted hereby under any patents, copyrights or other intellectual property rights of Renesas Electronics or others. 3. You should not alter, modify, copy, or otherwise misappropriate any Renesas Electronics product, whether in whole or in part. 4. Descriptions of circuits, software and other related information in this document are provided only to illustrate the operation of semiconductor products and application examples. -

X86 Disassembly Exploring the Relationship Between C, X86 Assembly, and Machine Code
x86 Disassembly Exploring the relationship between C, x86 Assembly, and Machine Code PDF generated using the open source mwlib toolkit. See http://code.pediapress.com/ for more information. PDF generated at: Sat, 07 Sep 2013 05:04:59 UTC Contents Articles Wikibooks:Collections Preface 1 X86 Disassembly/Cover 3 X86 Disassembly/Introduction 3 Tools 5 X86 Disassembly/Assemblers and Compilers 5 X86 Disassembly/Disassemblers and Decompilers 10 X86 Disassembly/Disassembly Examples 18 X86 Disassembly/Analysis Tools 19 Platforms 28 X86 Disassembly/Microsoft Windows 28 X86 Disassembly/Windows Executable Files 33 X86 Disassembly/Linux 48 X86 Disassembly/Linux Executable Files 50 Code Patterns 51 X86 Disassembly/The Stack 51 X86 Disassembly/Functions and Stack Frames 53 X86 Disassembly/Functions and Stack Frame Examples 57 X86 Disassembly/Calling Conventions 58 X86 Disassembly/Calling Convention Examples 64 X86 Disassembly/Branches 74 X86 Disassembly/Branch Examples 83 X86 Disassembly/Loops 87 X86 Disassembly/Loop Examples 92 Data Patterns 95 X86 Disassembly/Variables 95 X86 Disassembly/Variable Examples 101 X86 Disassembly/Data Structures 103 X86 Disassembly/Objects and Classes 108 X86 Disassembly/Floating Point Numbers 112 X86 Disassembly/Floating Point Examples 119 Difficulties 121 X86 Disassembly/Code Optimization 121 X86 Disassembly/Optimization Examples 124 X86 Disassembly/Code Obfuscation 132 X86 Disassembly/Debugger Detectors 137 Resources and Licensing 139 X86 Disassembly/Resources 139 X86 Disassembly/Licensing 141 X86 Disassembly/Manual of Style 141 References Article Sources and Contributors 142 Image Sources, Licenses and Contributors 143 Article Licenses License 144 Wikibooks:Collections Preface 1 Wikibooks:Collections Preface This book was created by volunteers at Wikibooks (http:/ / en. -
Cubesuite+ V1.00.00 Integrated Development Environment User's Manual: V850 Build
User’s Manual User’s CubeSuite+ V1.00.00 Integrated Development Environment User’s Manual: V850 Build Target Device V850 Microcontroller All information contained in these materials, including products and product specifications, represents information on the product at the time of publication and is subject to change by Renesas Electronics Corp. without notice. Please review the latest information published by Renesas Electronics Corp. through various means, including the Renesas Electronics Corp. website (http://www.renesas.com). www.renesas.com Rev.1.00 Apr 2011 Notice 1. All information included in this document is current as of the date this document is issued. Such information, however, is subject to change without any prior notice. Before purchasing or using any Renesas Electronics products listed herein, please confirm the latest product information with a Renesas Electronics sales office. Also, please pay regular and careful attention to additional and different information to be disclosed by Renesas Electronics such as that disclosed through our website. 2. Renesas Electronics does not assume any liability for infringement of patents, copyrights, or other intellectual property rights of third parties by or arising from the use of Renesas Electronics products or technical information described in this document. No license, express, implied or otherwise, is granted hereby under any patents, copyrights or other intellectual property rights of Renesas Electronics or others. 3. You should not alter, modify, copy, or otherwise misappropriate any Renesas Electronics product, whether in whole or in part. 4. Descriptions of circuits, software and other related information in this document are provided only to illustrate the operation of semiconductor products and application examples. -

GPU-Disasm: a GPU-Based X86 Disassembler
GPU-Disasm: A GPU-based x86 Disassembler Evangelos Ladakis1, Giorgos Vasiliadis1, Michalis Polychronakis2, Sotiris Ioannidis1, and Georgios Portokalidis3 1 FORTH-ICS, Greece fladakis, gvasil, [email protected] 2 Stony Brook University, USA [email protected] 3 Stevens Institute of Technology, USA [email protected] Abstract. Static binary code analysis and reverse engineering are cru- cial operations for malware analysis, binary-level software protections, debugging, and patching, among many other tasks. Faster binary code analysis tools are necessary for tasks such as analyzing the multitude of new malware samples gathered every day. Binary code disassembly is a core functionality of such tools which has not received enough atten- tion from a performance perspective. In this paper we introduce GPU- Disasm, a GPU-based disassembly framework for x86 code that takes advantage of graphics processors to achieve efficient large-scale analy- sis of binary executables. We describe in detail various optimizations and design decisions for achieving both inter-parallelism, to disassem- ble multiple binaries in parallel, as well as intra-parallelism, to decode multiple instructions of the same binary in parallel. The results of our experimental evaluation in terms of performance and power consumption demonstrate that GPU-Disasm is twice as fast than a CPU disassembler for linear disassembly and 4.4 times faster for exhaustive disassembly, with power consumption comparable to CPU-only implementations. 1 Introduction Code disassemblers are typically used to translate byte code to assembly lan- guage, as a first step in understanding the functionality of binaries when source code is not available. Besides software debugging and reverse engineering, dis- assemblers are widely used by security experts to analyze and understand the behaviour of malicious programs [8,12], or to find software bugs and vulnerabili- ties in closed-source applications.