Differential Geometry
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

J.M. Sullivan, TU Berlin A: Curves Diff Geom I, SS 2019 This Course Is an Introduction to the Geometry of Smooth Curves and Surf
J.M. Sullivan, TU Berlin A: Curves Diff Geom I, SS 2019 This course is an introduction to the geometry of smooth if the velocity never vanishes). Then the speed is a (smooth) curves and surfaces in Euclidean space Rn (in particular for positive function of t. (The cusped curve β above is not regular n = 2; 3). The local shape of a curve or surface is described at t = 0; the other examples given are regular.) in terms of its curvatures. Many of the big theorems in the DE The lengthR [ : Länge] of a smooth curve α is defined as subject – such as the Gauss–Bonnet theorem, a highlight at the j j len(α) = I α˙(t) dt. (For a closed curve, of course, we should end of the semester – deal with integrals of curvature. Some integrate from 0 to T instead of over the whole real line.) For of these integrals are topological constants, unchanged under any subinterval [a; b] ⊂ I, we see that deformation of the original curve or surface. Z b Z b We will usually describe particular curves and surfaces jα˙(t)j dt ≥ α˙(t) dt = α(b) − α(a) : locally via parametrizations, rather than, say, as level sets. a a Whereas in algebraic geometry, the unit circle is typically be described as the level set x2 + y2 = 1, we might instead This simply means that the length of any curve is at least the parametrize it as (cos t; sin t). straight-line distance between its endpoints. Of course, by Euclidean space [DE: euklidischer Raum] The length of an arbitrary curve can be defined (following n we mean the vector space R 3 x = (x1;:::; xn), equipped Jordan) as its total variation: with with the standard inner product or scalar product [DE: P Xn Skalarproduktp ] ha; bi = a · b := aibi and its associated norm len(α):= TV(α):= sup α(ti) − α(ti−1) : jaj := ha; ai. -
Surface Integrals
VECTOR CALCULUS 16.7 Surface Integrals In this section, we will learn about: Integration of different types of surfaces. PARAMETRIC SURFACES Suppose a surface S has a vector equation r(u, v) = x(u, v) i + y(u, v) j + z(u, v) k (u, v) D PARAMETRIC SURFACES •We first assume that the parameter domain D is a rectangle and we divide it into subrectangles Rij with dimensions ∆u and ∆v. •Then, the surface S is divided into corresponding patches Sij. •We evaluate f at a point Pij* in each patch, multiply by the area ∆Sij of the patch, and form the Riemann sum mn * f() Pij S ij ij11 SURFACE INTEGRAL Equation 1 Then, we take the limit as the number of patches increases and define the surface integral of f over the surface S as: mn * f( x , y , z ) dS lim f ( Pij ) S ij mn, S ij11 . Analogues to: The definition of a line integral (Definition 2 in Section 16.2);The definition of a double integral (Definition 5 in Section 15.1) . To evaluate the surface integral in Equation 1, we approximate the patch area ∆Sij by the area of an approximating parallelogram in the tangent plane. SURFACE INTEGRALS In our discussion of surface area in Section 16.6, we made the approximation ∆Sij ≈ |ru x rv| ∆u ∆v where: x y z x y z ruv i j k r i j k u u u v v v are the tangent vectors at a corner of Sij. SURFACE INTEGRALS Formula 2 If the components are continuous and ru and rv are nonzero and nonparallel in the interior of D, it can be shown from Definition 1—even when D is not a rectangle—that: fxyzdS(,,) f ((,))|r uv r r | dA uv SD SURFACE INTEGRALS This should be compared with the formula for a line integral: b fxyzds(,,) f (())|'()|rr t tdt Ca Observe also that: 1dS |rr | dA A ( S ) uv SD SURFACE INTEGRALS Example 1 Compute the surface integral x2 dS , where S is the unit sphere S x2 + y2 + z2 = 1. -

Geodetic Position Computations
GEODETIC POSITION COMPUTATIONS E. J. KRAKIWSKY D. B. THOMSON February 1974 TECHNICALLECTURE NOTES REPORT NO.NO. 21739 PREFACE In order to make our extensive series of lecture notes more readily available, we have scanned the old master copies and produced electronic versions in Portable Document Format. The quality of the images varies depending on the quality of the originals. The images have not been converted to searchable text. GEODETIC POSITION COMPUTATIONS E.J. Krakiwsky D.B. Thomson Department of Geodesy and Geomatics Engineering University of New Brunswick P.O. Box 4400 Fredericton. N .B. Canada E3B5A3 February 197 4 Latest Reprinting December 1995 PREFACE The purpose of these notes is to give the theory and use of some methods of computing the geodetic positions of points on a reference ellipsoid and on the terrain. Justification for the first three sections o{ these lecture notes, which are concerned with the classical problem of "cCDputation of geodetic positions on the surface of an ellipsoid" is not easy to come by. It can onl.y be stated that the attempt has been to produce a self contained package , cont8.i.ning the complete development of same representative methods that exist in the literature. The last section is an introduction to three dimensional computation methods , and is offered as an alternative to the classical approach. Several problems, and their respective solutions, are presented. The approach t~en herein is to perform complete derivations, thus stqing awrq f'rcm the practice of giving a list of for11111lae to use in the solution of' a problem. -

16.6 Parametric Surfaces and Their Areas
CHAPTER 16. VECTOR CALCULUS 239 16.6 Parametric Surfaces and Their Areas Comments. On the next page we summarize some ways of looking at graphs in Calc I, Calc II, and Calc III, and pose a question about what comes next. 2 3 2 Definition. Let r : R ! R and let D ⊆ R . A parametric surface S is the set of all points hx; y; zi such that hx; y; zi = r(u; v) for some hu; vi 2 D. In other words, it's the set of points you get using x = some function of u; v y = some function of u; v z = some function of u; v Example 1. (a) Describe the surface z = −x2 − y2 + 2 over the region D : −1 ≤ x ≤ 1; −1 ≤ y ≤ 1 as a parametric surface. Graph it in MATLAB. (b) Describe the surface z = −x2 − y2 + 2 over the region D : x2 + y2 ≤ 1 as a parametric surface. Graph it in MATLAB. Solution: (a) In this case we \cheat": we already have z as a function of x and y, so anything we do to get rid of x and y will work x = u y = v z = −u2 − v2 + 2 −1 ≤ u ≤ 1; −1 ≤ v ≤ 1 [u,v]=meshgrid(linspace(-1,1,35)); x=u; y=v; z=2-u.^2-v.^2; surf(x,y,z) CHAPTER 16. VECTOR CALCULUS 240 How graphs look in different contexts: Pre-Calc, and Calc I graphs: Calc II parametric graphs: y = f(x) x = f(t), y = g(t) • 1 number gets plugged in (usually x) • 1 number gets plugged in (usually t) • 1 number comes out (usually y) • 2 numbers come out (x and y) • Graph is essentially one dimensional (if you zoom in enough it looks like a line, plus you only need • graph is essentially one dimensional (but we one number, x, to specify any location on the don't picture t at all) graph) • We need to picture the graph in two dimensional • We need to picture the graph in a two dimen- world. -

Polynomial Curves and Surfaces
Polynomial Curves and Surfaces Chandrajit Bajaj and Andrew Gillette September 8, 2010 Contents 1 What is an Algebraic Curve or Surface? 2 1.1 Algebraic Curves . .3 1.2 Algebraic Surfaces . .3 2 Singularities and Extreme Points 4 2.1 Singularities and Genus . .4 2.2 Parameterizing with a Pencil of Lines . .6 2.3 Parameterizing with a Pencil of Curves . .7 2.4 Algebraic Space Curves . .8 2.5 Faithful Parameterizations . .9 3 Triangulation and Display 10 4 Polynomial and Power Basis 10 5 Power Series and Puiseux Expansions 11 5.1 Weierstrass Factorization . 11 5.2 Hensel Lifting . 11 6 Derivatives, Tangents, Curvatures 12 6.1 Curvature Computations . 12 6.1.1 Curvature Formulas . 12 6.1.2 Derivation . 13 7 Converting Between Implicit and Parametric Forms 20 7.1 Parameterization of Curves . 21 7.1.1 Parameterizing with lines . 24 7.1.2 Parameterizing with Higher Degree Curves . 26 7.1.3 Parameterization of conic, cubic plane curves . 30 7.2 Parameterization of Algebraic Space Curves . 30 7.3 Automatic Parametrization of Degree 2 Curves and Surfaces . 33 7.3.1 Conics . 34 7.3.2 Rational Fields . 36 7.4 Automatic Parametrization of Degree 3 Curves and Surfaces . 37 7.4.1 Cubics . 38 7.4.2 Cubicoids . 40 7.5 Parameterizations of Real Cubic Surfaces . 42 7.5.1 Real and Rational Points on Cubic Surfaces . 44 7.5.2 Algebraic Reduction . 45 1 7.5.3 Parameterizations without Real Skew Lines . 49 7.5.4 Classification and Straight Lines from Parametric Equations . 52 7.5.5 Parameterization of general algebraic plane curves by A-splines . -
Design Data 21
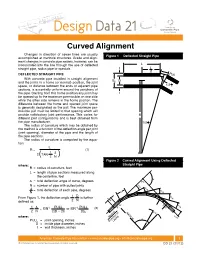
Design Data 21 Curved Alignment Changes in direction of sewer lines are usually Figure 1 Deflected Straight Pipe accomplished at manhole structures. Grade and align- Figure 1 Deflected Straight Pipe ment changes in concrete pipe sewers, however, can be incorporated into the line through the use of deflected L straight pipe, radius pipe or specials. t L 2 DEFLECTED STRAIGHT PIPE Pull With concrete pipe installed in straight alignment Bc D and the joints in a home (or normal) position, the joint ∆ space, or distance between the ends of adjacent pipe 1/2 N sections, is essentially uniform around the periphery of the pipe. Starting from this home position any joint may t be opened up to the maximum permissible on one side while the other side remains in the home position. The difference between the home and opened joint space is generally designated as the pull. The maximum per- missible pull must be limited to that opening which will provide satisfactory joint performance. This varies for R different joint configurations and is best obtained from the pipe manufacturer. ∆ 1/2 N The radius of curvature which may be obtained by this method is a function of the deflection angle per joint (joint opening), diameter of the pipe and the length of the pipe sections. The radius of curvature is computed by the equa- tion: L R = (1) 1 ∆ 2 TAN ( 2 N ) Figure 2 Curved Alignment Using Deflected Figure 2 Curved Alignment Using Deflected where: Straight Pipe R = radius of curvature, feet Straight Pipe L = length of pipe sections measured along the centerline, feet ∆ ∆ = total deflection angle of curve, degrees P.I. -

Basics of the Differential Geometry of Surfaces
Chapter 20 Basics of the Differential Geometry of Surfaces 20.1 Introduction The purpose of this chapter is to introduce the reader to some elementary concepts of the differential geometry of surfaces. Our goal is rather modest: We simply want to introduce the concepts needed to understand the notion of Gaussian curvature, mean curvature, principal curvatures, and geodesic lines. Almost all of the material presented in this chapter is based on lectures given by Eugenio Calabi in an upper undergraduate differential geometry course offered in the fall of 1994. Most of the topics covered in this course have been included, except a presentation of the global Gauss–Bonnet–Hopf theorem, some material on special coordinate systems, and Hilbert’s theorem on surfaces of constant negative curvature. What is a surface? A precise answer cannot really be given without introducing the concept of a manifold. An informal answer is to say that a surface is a set of points in R3 such that for every point p on the surface there is a small (perhaps very small) neighborhood U of p that is continuously deformable into a little flat open disk. Thus, a surface should really have some topology. Also,locally,unlessthe point p is “singular,” the surface looks like a plane. Properties of surfaces can be classified into local properties and global prop- erties.Intheolderliterature,thestudyoflocalpropertieswascalled geometry in the small,andthestudyofglobalpropertieswascalledgeometry in the large.Lo- cal properties are the properties that hold in a small neighborhood of a point on a surface. Curvature is a local property. Local properties canbestudiedmoreconve- niently by assuming that the surface is parametrized locally. -

AN INTRODUCTION to the CURVATURE of SURFACES by PHILIP ANTHONY BARILE a Thesis Submitted to the Graduate School-Camden Rutgers
AN INTRODUCTION TO THE CURVATURE OF SURFACES By PHILIP ANTHONY BARILE A thesis submitted to the Graduate School-Camden Rutgers, The State University Of New Jersey in partial fulfillment of the requirements for the degree of Master of Science Graduate Program in Mathematics written under the direction of Haydee Herrera and approved by Camden, NJ January 2009 ABSTRACT OF THE THESIS An Introduction to the Curvature of Surfaces by PHILIP ANTHONY BARILE Thesis Director: Haydee Herrera Curvature is fundamental to the study of differential geometry. It describes different geometrical and topological properties of a surface in R3. Two types of curvature are discussed in this paper: intrinsic and extrinsic. Numerous examples are given which motivate definitions, properties and theorems concerning curvature. ii 1 1 Introduction For surfaces in R3, there are several different ways to measure curvature. Some curvature, like normal curvature, has the property such that it depends on how we embed the surface in R3. Normal curvature is extrinsic; that is, it could not be measured by being on the surface. On the other hand, another measurement of curvature, namely Gauss curvature, does not depend on how we embed the surface in R3. Gauss curvature is intrinsic; that is, it can be measured from on the surface. In order to engage in a discussion about curvature of surfaces, we must introduce some important concepts such as regular surfaces, the tangent plane, the first and second fundamental form, and the Gauss Map. Sections 2,3 and 4 introduce these preliminaries, however, their importance should not be understated as they lay the groundwork for more subtle and advanced topics in differential geometry. -

Radius-Of-Curvature.Pdf
CHAPTER 5 CURVATURE AND RADIUS OF CURVATURE 5.1 Introduction: Curvature is a numerical measure of bending of the curve. At a particular point on the curve , a tangent can be drawn. Let this line makes an angle Ψ with positive x- axis. Then curvature is defined as the magnitude of rate of change of Ψ with respect to the arc length s. Ψ Curvature at P = It is obvious that smaller circle bends more sharply than larger circle and thus smaller circle has a larger curvature. Radius of curvature is the reciprocal of curvature and it is denoted by ρ. 5.2 Radius of curvature of Cartesian curve: ρ = = (When tangent is parallel to x – axis) ρ = (When tangent is parallel to y – axis) Radius of curvature of parametric curve: ρ = , where and – Example 1 Find the radius of curvature at any pt of the cycloid , – Solution: Page | 1 – and Now ρ = = – = = =2 Example 2 Show that the radius of curvature at any point of the curve ( x = a cos3 , y = a sin3 ) is equal to three times the lenth of the perpendicular from the origin to the tangent. Solution : – – – = – 3a [–2 cos + ] 2 3 = 6 a cos sin – 3a cos = Now = – = Page | 2 = – – = – – = = 3a sin …….(1) The equation of the tangent at any point on the curve is 3 3 y – a sin = – tan (x – a cos ) x sin + y cos – a sin cos = 0 ……..(2) The length of the perpendicular from the origin to the tangent (2) is – p = = a sin cos ……..(3) Hence from (1) & (3), = 3p Example 3 If & ' are the radii of curvature at the extremities of two conjugate diameters of the ellipse = 1 prove that Solution: Parametric equation of the ellipse is x = a cos , y=b sin = – a sin , = b cos = – a cos , = – b sin The radius of curvature at any point of the ellipse is given by = = – – – – – Page | 3 = ……(1) For the radius of curvature at the extremity of other conjugate diameter is obtained by replacing by + in (1). -

Surface Normals and Tangent Planes
Surface Normals and Tangent Planes Normal and Tangent Planes to Level Surfaces Because the equation of a plane requires a point and a normal vector to the plane, …nding the equation of a tangent plane to a surface at a given point requires the calculation of a surface normal vector. In this section, we explore the concept of a normal vector to a surface and its use in …nding equations of tangent planes. To begin with, a level surface U (x; y; z) = k is said to be smooth if the gradient U = Ux;Uy;Uz is continuous and non-zero at any point on the surface. Equivalently,r h we ofteni write U = Uxex + Uyey + Uzez r where ex = 1; 0; 0 ; ey = 0; 1; 0 ; and ez = 0; 0; 1 : Supposeh now thati r (t) =h x (ti) ; y (t) ; z (t) hlies oni a smooth surface U (x; y; z) = k: Applying the derivative withh respect to t toi both sides of the equation of the level surface yields dU d = k dt dt Since k is a constant, the chain rule implies that U v = 0 r where v = x0 (t) ; y0 (t) ; z0 (t) . However, v is tangent to the surface because it is tangenth to a curve on thei surface, which implies that U is orthogonal to each tangent vector v at a given point on the surface. r That is, U (p; q; r) at a given point (p; q; r) is normal to the tangent plane to r 1 the surface U(x; y; z) = k at the point (p; q; r). -

Shapewright: Finite Element Based Free-Form Shape Design
ShapeWright: Finite Element Based Free-Form Shape Design by George Celniker S.M., Mechanical Engineering Massachusetts Institute of Technology January, 1981 B.S., Mechanical Engineering Massachusetts Institute of Technology May, 1979 Submitted to the Department of Mechanical Engineering in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy in Mechanical Engineering at the Massachusetts Institute of Technology September, 1990 © Massachusetts Institute of Technology, 1990, All rights reserved. Signature of Author . ... , , , Department of Mechariical Engineering August 3, 1990 Certified by Professor David C. Gossard Thesis Supervisor Accepted by Ain A. Sonin Chairman, Department Committee MASSACHUITTS INSTITOiI OF TECHIvn .:.. NOV 0 8 1990 LIBRARIEb ShapeWright: Finite Element Based Free-Form Shape Design by George Celniker Submitted to the Department of Mechanical Engineering on September, 1990 inpartial fulfillment of the requirements for the degree of Doctor of Philosophy inMechanical Engineering. Abstract The mathematical foundations and an implementation of a new free-form shape design paradigm are developed. The finite element method is applied to generate shapes that minimize a surface energy function subject to user-specified geometric constraints while responding to user-specified forces. Because of the energy minimization these surfaces opportunistically seek globally fair shapes. It is proposed that shape fairness is a global and not a local property. Very fair shapes with C1 continuity are designed. Two finite elements, a curve segment and a triangular surface element, are developed and used as the geometric primitives of the approach. The curve segments yield piecewise C1 Hermite cubic polynomials. The surface element edges have cubic variations in position and parabolic variations in surface normal and can be combined to yield piecewise C1 surfaces. -

Geodesic Methods for Shape and Surface Processing Gabriel Peyré, Laurent D
Geodesic Methods for Shape and Surface Processing Gabriel Peyré, Laurent D. Cohen To cite this version: Gabriel Peyré, Laurent D. Cohen. Geodesic Methods for Shape and Surface Processing. Tavares, João Manuel R.S.; Jorge, R.M. Natal. Advances in Computational Vision and Medical Image Process- ing: Methods and Applications, Springer Verlag, pp.29-56, 2009, Computational Methods in Applied Sciences, Vol. 13, 10.1007/978-1-4020-9086-8. hal-00365899 HAL Id: hal-00365899 https://hal.archives-ouvertes.fr/hal-00365899 Submitted on 4 Mar 2009 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Geodesic Methods for Shape and Surface Processing Gabriel Peyr´eand Laurent Cohen Ceremade, UMR CNRS 7534, Universit´eParis-Dauphine, 75775 Paris Cedex 16, France {peyre,cohen}@ceremade.dauphine.fr, WWW home page: http://www.ceremade.dauphine.fr/{∼peyre/,∼cohen/} Abstract. This paper reviews both the theory and practice of the nu- merical computation of geodesic distances on Riemannian manifolds. The notion of Riemannian manifold allows to define a local metric (a symmet- ric positive tensor field) that encodes the information about the prob- lem one wishes to solve. This takes into account a local isotropic cost (whether some point should be avoided or not) and a local anisotropy (which direction should be preferred).