And Trailing-Edge Control on a Swept Lambda Wing Magnus Tormalm, Jean-François Le Roy, Stephane Morgand
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
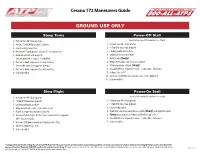
Cessna 172 Maneuvers Guide Private Single-Engine, Commercial Single-Engine, and CFI Single-Engine
Cessna 172 Maneuvers Guide Private Single-Engine, Commercial Single-Engine, and CFI Single-Engine GROUND USE ONLY Steep Turns Power-Off Stall 1. Perform two 90º clearing turns See Policies and Procedures — Stalls 2. 90 KIAS (*2000 RPM) maintain altitude 1. Perform two 90° clearing turns 3. Cruise configuration flow 2. *1500 RPM (maintain altitude) 4. Roll into 45˚ bank (private, at least 50˚ for commercial) 3. Landing configuration flow 5. Maintain altitude and airspeed 4. Stabilized descent at 65 KIAS (+ back pressure, + approx. 1-200 RPM) 5. Throttle idle (Slowly) 6. Roll out ½ bank angle prior to entry heading 6. Wings level or up to 20° bank as assigned 7. Clear traffic and roll in opposite direction 7. Pitch to maintain altitude (Slowly) 8. Roll out ½ bank angle prior to entry heading 8. At stall/buffet (as required) recover – reduce AOA - full power 9. Cruise checklist 9. Reduce flaps to 10° 10. Accelerate to 60 KIAS (VX), positive rate, reduce flaps to 0° 11. Cruise checklist Slow Flight Power-On Stall 1. Perform two 90º clearing turns See Policies and Procedures — Stalls 2. *1500 RPM (maintain altitude) 1. Perform two 90° clearing turns 3. Landing configuration flow 2. *1500 RPM (maintain altitude) 4. Maintain altitude - slow to just above a stall 3. Clean configuration 5. Power as required to maintain airspeed 4. At 60 KIAS, simultaneously increase pitch (Slowly) and apply full power 6. Accomplish level flight, climbs, turns, and descents as required 5. Slowly increase pitch to induce stall/buffet (approx 15°) (ATP - max 30° bank) 6. At stall/buffet (as required) recover – reduce AOA - full power 7. -

FAA-H-8083-3A, Airplane Flying Handbook -- 3 of 7 Files
Ch 04.qxd 5/7/04 6:46 AM Page 4-1 NTRODUCTION Maneuvering during slow flight should be performed I using both instrument indications and outside visual The maintenance of lift and control of an airplane in reference. Slow flight should be practiced from straight flight requires a certain minimum airspeed. This glides, straight-and-level flight, and from medium critical airspeed depends on certain factors, such as banked gliding and level flight turns. Slow flight at gross weight, load factors, and existing density altitude. approach speeds should include slowing the airplane The minimum speed below which further controlled smoothly and promptly from cruising to approach flight is impossible is called the stalling speed. An speeds without changes in altitude or heading, and important feature of pilot training is the development determining and using appropriate power and trim of the ability to estimate the margin of safety above the settings. Slow flight at approach speed should also stalling speed. Also, the ability to determine the include configuration changes, such as landing gear characteristic responses of any airplane at different and flaps, while maintaining heading and altitude. airspeeds is of great importance to the pilot. The student pilot, therefore, must develop this awareness in FLIGHT AT MINIMUM CONTROLLABLE order to safely avoid stalls and to operate an airplane AIRSPEED This maneuver demonstrates the flight characteristics correctly and safely at slow airspeeds. and degree of controllability of the airplane at its minimum flying speed. By definition, the term “flight SLOW FLIGHT at minimum controllable airspeed” means a speed at Slow flight could be thought of, by some, as a speed which any further increase in angle of attack or load that is less than cruise. -

Incorporation of Physics-Based Controllability Analysis in Aircraft
INCORPORATION OF PHYSICS-BASED CONTROLLABILITY ANALYSIS IN AIRCRAFT MULTI-FIDELITY MADO FRAMEWORK Dissertation Submitted to The School of Engineering of the UNIVERSITY OF DAYTON In Partial Fulfillment of the Requirements for The Degree of Doctor of Philosophy in Engineering By Christopher Meckstroth, M.S. Dayton, Ohio December 2019 INCORPORATION OF PHYSICS-BASED CONTROLLABILITY ANALYSIS IN AIRCRAFT MULTI-FIDELITY MADO FRAMEWORK Name: Meckstroth, Christopher Michael APPROVED BY: _________________________________ ________________________________ Raúl Ordóñez, Ph.D. Raymond Kolonay, Ph.D. Advisory Committee Chairman Committee Member Associate Professor Director Electrical and Computer Engineering Multidisciplinary Science and University of Dayton Technology Center AFRL/RQVC _________________________________ ________________________________ Eric Balster, Ph.D. Keigo Hirakawa, Ph.D. Committee Member Committee Member Associate Professor Associate Professor Electrical and Computer Engineering Electrical and Computer Engineering University of Dayton University of Dayton _________________________________ ________________________________ Robert J. Wilkens, Ph.D., P.E. Eddy M. Rojas, Ph.D., M.A., P.E. Associate Dean for Research and Innovation Dean, School of Engineering Professor School of Engineering ii ABSTRACT INCORPORATION OF PHYSICS-BASED CONTROLLABILITY ANALYSIS IN AIRCRAFT MULTI-FIDELITY MADO FRAMEWORK Name: Meckstroth, Christopher Michael University of Dayton Advisor: Dr. Raúl Ordóñez A method is presented to incorporate physics-based controllability -

Investigating the Effects of Altitude and Flap Setting on the Specific Excess Power of a PA-28-161 Piper Warrior
Investigating the Effects of Altitude and Flap Setting on the Specific Excess Power of a PA-28-161 Piper Warrior By Tjimon Meric Louisy A thesis submitted to the College of Engineering and Science of Florida Institute of Technology In partial fulfillment of the requirements For the degree of Master of Science in Flight Test Engineering Melbourne, Florida December 2019 We the undersigned committee hereby approve the attached thesis, “Investigating the Effects of Altitude and Flap Setting on the Specific Excess Power of a PA-28-161 Piper Warrior”, by Tjimon Meric Louisy. _________________________________________________ Brian A. Kish, Ph.D. Assistant Professor Aerospace, Physics and Space Sciences Major Advisor _________________________________________________ Isaac Silver, Ph.D. Associate Professor College of Aeronautics _________________________________________________ Ralph Kimberlin, Dr. Ing Professor Aerospace, Physics and Space Sciences _________________________________________________ Daniel Batcheldor Professor and Department Head Aerospace, Physics and Space Sciences Abstract Investigating the Effects of Altitude and Flap Configuration on the Specific Excess Power of a PA-28-161 Piper Warrior Tjimon Meric Louisy Advisor: Brian A. Kish, Ph.D. The high number of General Aviation (GA) accidents attributed to Loss of Control suggests that GA pilots are lacking low speed awareness and are unable to appropriately recognize when the aircraft is in a low energy state. There is, therefore, an urgent need for the development of an energy management system which is applicable to GA aircraft that can alert the pilot in situations of low energy conditions and recommends to the pilot the appropriate corrective action to restore conditions to a safe energy state. This will require the development of an algorithm that governs this energy management system that considers a comprehensive understanding of the performance capabilities of GA aircraft, particularly the ability of the aircraft to progress from one energy state to another. -

Aircraft Speed Impacts on Community Noise Report (Final) V13
Evaluation of the Impact of Transport Jet Aircraft Approach and Departure Speed on Community Noise Prof. R. John Hansman Jacqueline Thomas Report No. ICAT-2020-03 April 2020 MIT International Center for Air Transportation (ICAT) Department of Aeronautics & Astronautics Massachusetts Institute of Technology CambriDge, MA 02139 USA I. Introduction This report evaluates the impact of changing aircraft speeD During approach anD Departure on community noise for transport category jet aircraft. This analysis is part of a broader stuDy investigating the opportunities to moDify approach anD Departure proceDures to reDuce community noise impact. This report also adDresses a requirement in Section 179 of the FAA Reauthorization Act of 2018 (H.R. 302) to evaluate the relationship between jet aircraft approach anD takeoff speeDs anD corresponDing noise impacts on communities surrounDing airports. II. Impact of Speed on Aircraft Source Noise The primary sources of noise from aircraft are engine anD airframe noise, as shown in Fig. 1. Historically jet engine noise has been the Dominant noise source, particularly During high power settings on takeoff. Modern engines have become significantly quieter [1] anD airframe noise has become increasingly important During lanDing anD for some reDuceD power settings. Aircraft speed impacts engine anD airframe noise Differently, as discussed briefly below. Aircraft Noise Sources Engine Noise Airframe Noise Trailing Edge Fan Slats CombustionCore Flaps Jet Landing Gear Fig. 1 Primary Conventional Turbofan Aircraft Noise Sources Example breakDowns of the various noise components for a representative narrow-body jet transport aircraft after initial Departure anD on final approach are shown in Fig. 2. Engine noise is Dominant on Departure with most of the noise coming from the fan, followeD by the jet. -

Effects on Level Flight Performance of the Optimized Wind Deflector Modification for the MD-500 Helicopter
University of Tennessee, Knoxville TRACE: Tennessee Research and Creative Exchange Masters Theses Graduate School 12-2007 Effects on Level Flight Performance of the Optimized Wind Deflector Modification for the MD-500 Helicopter Adam Joseph Cowan University of Tennessee - Knoxville Follow this and additional works at: https://trace.tennessee.edu/utk_gradthes Part of the Aerospace Engineering Commons Recommended Citation Cowan, Adam Joseph, "Effects on Level Flight Performance of the Optimized Wind Deflector Modification for the MD-500 Helicopter. " Master's Thesis, University of Tennessee, 2007. https://trace.tennessee.edu/utk_gradthes/111 This Thesis is brought to you for free and open access by the Graduate School at TRACE: Tennessee Research and Creative Exchange. It has been accepted for inclusion in Masters Theses by an authorized administrator of TRACE: Tennessee Research and Creative Exchange. For more information, please contact [email protected]. To the Graduate Council: I am submitting herewith a thesis written by Adam Joseph Cowan entitled "Effects on Level Flight Performance of the Optimized Wind Deflector Modification for the MD-500 Helicopter." I have examined the final electronic copy of this thesis for form and content and recommend that it be accepted in partial fulfillment of the equirr ements for the degree of Master of Science, with a major in Aviation Systems. Stephen Corda, Major Professor We have read this thesis and recommend its acceptance: Frank G. Collins, U. Peter Solies Accepted for the Council: Carolyn R. Hodges -

CJ-3000 Turbofan Engine Design Proposal
CJ-3000 Turbofan Engine Design Proposal Team Leader: Wang Yingjun Team Member: Guo Minghao & Hu Yu Faculty Advisor: Dr. Chen Min SIGNATURE PAGE Design Team: Wang Yingjun: #921794 Guo Mingha: #921803 Hu Yu: #921800 Acknowledgements The authors would like to thank the following individuals who were instrumental in the success of this engine design: Dr. Chen Min for his tremendous help in completing this proposal. Dr. Li Lin and Dr. Fan Yu for their advice on rotor dynamics Dr. Chen Jiang for his guidance on turbomachinery aerodynamics Dr. Joachim Kurzke, Prof. Peter Jeschke, and Mr. Guo Ran for their aids on GasTurb Our colleague Zhao Jiaheng for his novel idea on cycle design Our senior Li Mingzhe for his instruction on turbine design The work site provided by our College All the teachers, students and facilities who have aided. Abstract The CJ 3000 is a triple-spool, mixed flow, middle bypass ratio turbofan engine designed as a candidate engine for the next generation supersonic transport. The performance of the CJ 3000 is shown to reach all requirements of the RFP. The CJ 3000 offers great performance gains over the requirements and baseline engine, providing required thrust levels and a significantly lower TSFC for all four main flight conditions, less total engine weight, less fuel consumption and NOx emissions, and lower exhaust noise at takeoff. The practical and advanced technologies CJ 3000 employed are presented as follows. Engine Component Technologies Employed Engine Configuration Triple-Spool Engine Inlet System Two-Dimensional -

Aircraft Drag Polar Estimation Based on a Stochastic Hierarchical Model
Aircraft Drag Polar Estimation Based on a Stochastic Hierarchical Model Junzi Sun, Jacco M. Hoekstra, Joost Ellerbroek Control and Simulation, Faculty of Aerospace Engineering Delft University of Technology, the Netherlands Abstract—The aerodynamic properties of an aircraft determine airspeed, and air density, and the remaining effects of the flow a crucial part of the aircraft performance model. Deriving for both the lift and drag are described with coefficients for accurate aerodynamic coefficients requires detailed knowledge both forces. The most complicated part is to model these lift of the aircraft’s design. These designs and parameters are well protected by aircraft manufacturers. They rarely can be used and drag coefficients. These parameters depend on the Mach in public research. Very detailed aerodynamic models are often number, the angle of attack, the boundary layer and ultimately not necessary in air traffic management related research, as they on the design of the aircraft shape. For fixed-wing aircraft, often use a simplified point-mass aircraft performance model. these coefficients are presented as functions of the angle of In these studies, a simple quadratic relation often assumed to attack, i.e., the angle between the aircraft body axis and the compute the drag of an aircraft based on the required lift. This so-called drag polar describes an approximation of the airspeed vector. In air traffic management (ATM) research, drag coefficient based on the total lift coefficient. The two key however, simplified point-mass aircraft performance models parameters in the drag polar are the zero-lift drag coefficient and are mostly used. These point-mass models consider an aircraft the factor to calculate the lift-induced part of the drag coefficient. -

A Review of Current Leading Edge Devices
A REVIEW OF CURRENT LEADING EDGE DEVICE TECHNOLOGY AND OF OPTIONS FOR INNOVATION BASED ON FLOW CONTROL. Helen Heap Bill Crowther University of Manchester, UK Abstract. An innovative step change is required to improve the total integrated wing/ high lift system design. or replace the current mechanically deployed The total elimination of traditional high lift leading edge high lift systems for civil transport systems, for instance, would allow for an increase aircraft. This paper provides a review of existing in the fuel tank volume and give the aircraft a leading edge device technologies for high lift and greater range and reduced weight. possible future technologies based on flow control. There is an emphasis on those flow Traditional high lift systems are now highly control technologies that will be sufficiently mature evolved with only a small improvement in enough for implementation within the next aerodynamic performance possible [4]. The decade. The characteristics of the flow control practical implications of this are that current state technologies are presented with regard to the of the art high lift systems are now very sensitive practical implications of the implementation of a to deployment location. Meeting the demands of design. that sensitivity in real terms requires expensive, Nomenclature. complicated and heavy mechanical systems. The value added to a system over time, its evaluation, Cylinder surface and the choice between further optimisation and C Lift coefficient U L Cvelocity innovation is represented in Figure 1, “Technical Maximum lift Stall angle of evolution “S” curves”. C α Lmax coefficient stall incidence Max angle of C Drag coefficient α D max incidence Value h Height (inches) ΔCL Change in CL Boundary layer Hz Hertz d depth Free stream U OPTIMISATION velocity Abbreviations INNOVATION Db(A) Decibels L/D Lift to drag ratio LE Leading edge LFC Laminar Flow Control nm Nautical miles Time VC Variable camber Technical evolution “S” curves Figure 1 Introduction. -
Iiiiiiiiii 11111111111111111 Nasa
IIIIIIIIIII11111111111111111 3 1176 00147 8172 NASA Technical Memorandum 80204 NASA-TM-80204 19800010747 MILITARY AIRCRAFTANDMISSILE TECHNOLOGY " AT THELANGLEYRESEARCHCENTER--ASELECTED BIBLIOGRAPHY DALV. MADDALON _'i:"L)gt 2'."_,:_"."........... JANUARY1980 NASA National Aeronautics and Space Administration Langley Research Center Hampton, Virginia 23665 FOREWORD This report was produced in support of the Langley Research Center's efforts in developing Advanced Military Aircraft and Missile Technology. It represents a compilation of reference material on Langley's efforts over the past twenty years. The technical material presented includes efforts made in aerodynamics, performance, stability, control, stall-spin, propulsion integration, flutter, materials, and structures. Section A presents several representative reports on Langley's contributions to 56 specific military aircraft and missile programs between 1960 and 1979 (also see fig. 1). Section B presents Langley's military related research reports produced between 1974 and 1978. Section C presents the military publications contributed by the research personnel staffing Langley's Differential Maneuvering Simulator facility from its inception to the present. Table of Contents Page Section A - Representative Langley Research Center 4 Contributions to Military Aircraft and Missile Technology (1960-1979) Section B - Recent Langley Research Center Contributions 18 to Military Aircraft and Missile Technology Section C - Langley Research Center Differential Maneuvering 39 Simulator Studies -
Chapter 4: Maintaining Aircraft Control: Upset Prevention and Recovery
Chapter 4 Maintaining Aircraft Control: Upset Prevention and Recovery Training Introduction A pilot’s fundamental responsibility is to prevent a loss of control (LOC). Loss of control in-flight (LOC-I) is the leading cause of fatal general aviation accidents in the U.S. and commercial aviation worldwide. LOC-I is defined as a significant deviation of an aircraft from the intended flightpath and it often results from an airplane upset. Maneuvering is the most common phase of flight for general aviation LOC-I accidents to occur; however, LOC-I accidents occur in all phases of flight. To prevent LOC-I accidents, it is important for pilots to recognize and maintain a heightened awareness of situations that increase the risk of loss of control. Those situations include: uncoordinated flight, equipment malfunctions, pilot complacency, distraction, turbulence, and poor risk management – like attempting to fly in instrument meteorological conditions (IMC) when the pilot is not qualified or proficient. Sadly, there are also LOC-I accidents resulting from intentional disregard or recklessness. 4-1 To maintain aircraft control when faced with these or other contributing factors, the pilot must be aware of situations where LOC-I can occur, recognize when an airplane is approaching a stall, has stalled, or is in an upset condition, and understand and execute the correct procedures to recover the aircraft. D.C. ELEC. R 6 0 ° Defining an Airplane Upset 2 MIN. NO PITCH INFORMATION The term “upset” was formally introduced by an industry L work group in 2004 in the “Pilot Guide to Airplane Upset i Recovery,” which is one part of the “Airplane Upset Recovery Training Aid.” The working group was primarily focused on large transport airplanes and sought to come up with one term to describe an “unusual attitude” or “loss of control,” for example, and to generally describe specific parameters as part of its definition. -

F-105D Thunderchief
F-105D Thunderchief USER MANUAL Virtavia F-105D Thunderchief – DTG Steam Edition Manual Version 1.0 0 Introduction The Republic F-105 Thunderchief, first flown in 1955 and often known as "Thud" by its pilots, was a rugged and reliable multi-role fighter with an emphasis on low-altitude, high-speed penetration strikes with a single nuclear bomb. At the time of its construction it was the largest fighter in the world and set several world speed records. The F-105D was the definitive variation, featuring an all-weather capability and modern avionics (for the time) with 610 units of this type being built. In Vietnam, the F-105s were used as bombers, the usual load exceeded by fifty percent the amount carried by a World War II B-17. An extra fuel tank was fitted into the spacious bomb bay while up to 12,000 lbs of bombs were suspended from five hardpoints. Though primarily used as a bomber, the Thunderchief still scored its share of downed Migs, 29 of which felt the bite of the Thud. The F-105D's wing measures 34 feet 11 inches, tip to tip. Length is 64 feet 3 inches and height is 19 feet 8 inches. Wing area is 385 square feet. With its afterburning J75-P-9V, the F-105D has a maximum speed of 1,390 mph at 50,000 feet. Empty weight is 27,500 pounds, normal weight is 38,034 pounds, gross weight is 52,546 pounds. The built-in armament of the F-105D consists of one 20 mm M61 Vulcan cannon with 1,029 rounds.