Automatic Performance Optimization on Heterogeneous Computer Systems Using Manycore Coprocessors Chenggang Lai University of Arkansas, Fayetteville
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Increasing Memory Miss Tolerance for SIMD Cores
Increasing Memory Miss Tolerance for SIMD Cores ∗ David Tarjan, Jiayuan Meng and Kevin Skadron Department of Computer Science University of Virginia, Charlottesville, VA 22904 {dtarjan, jm6dg,skadron}@cs.virginia.edu ABSTRACT that use a single instruction multiple data (SIMD) organi- Manycore processors with wide SIMD cores are becoming a zation can amortize the area and power overhead of a single popular choice for the next generation of throughput ori- frontend over a large number of execution backends. For ented architectures. We introduce a hardware technique example, we estimate that a 32-wide SIMD core requires called “diverge on miss” that allows SIMD cores to better about one fifth the area of 32 individual scalar cores. Note tolerate memory latency for workloads with non-contiguous that this estimate does not include the area of any intercon- memory access patterns. Individual threads within a SIMD nection network among the MIMD cores, which often grows “warp” are allowed to slip behind other threads in the same supra-linearly with the number of cores [18]. warp, letting the warp continue execution even if a subset of To better tolerate memory and pipeline latencies, many- core processors typically use fine-grained multi-threading, threads are waiting on memory. Diverge on miss can either 1 increase the performance of a given design by up to a factor switching among multiple warps, so that active warps can of 3.14 for a single warp per core, or reduce the number of mask stalls in other warps waiting on long-latency events. warps per core needed to sustain a given level of performance The drawback of this approach is that the size of the regis- from 16 to 2 warps, reducing the area per core by 35%. -

On Heterogeneous Compute and Memory Systems
ON HETEROGENEOUS COMPUTE AND MEMORY SYSTEMS by Jason Lowe-Power A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy (Computer Sciences) at the UNIVERSITY OF WISCONSIN–MADISON 2017 Date of final oral examination: 05/31/2017 The dissertation is approved by the following members of the Final Oral Committee: Mark D. Hill, Professor, Computer Sciences Dan Negrut, Professor, Mechanical Engineering Jignesh M. Patel, Professor, Computer Sciences Karthikeyan Sankaralingam, Associate Professor, Computer Sciences David A. Wood, Professor, Computer Sciences © Copyright by Jason Lowe-Power 2017 All Rights Reserved i Acknowledgments I would like to acknowledge all of the people who helped me along the way to completing this dissertation. First, I would like to thank my advisors, Mark Hill and David Wood. Often, when students have multiple advisors they find there is high “synchronization overhead” between the advisors. However, Mark and David complement each other well. Mark is a high-level thinker, focusing on the structure of the argument and distilling ideas to their essentials; David loves diving into the details of microarchitectural mechanisms. Although ever busy, at least one of Mark or David were available to meet with me, and they always took the time to help when I needed it. Together, Mark and David taught me how to be a researcher, and they have given me a great foundation to build my career. I thank my committee members. Jignesh Patel for his collaborations, and for the fact that each time I walked out of his office after talking to him, I felt a unique excitement about my research. -

Tousimojarad, Ashkan (2016) GPRM: a High Performance Programming Framework for Manycore Processors. Phd Thesis
Tousimojarad, Ashkan (2016) GPRM: a high performance programming framework for manycore processors. PhD thesis. http://theses.gla.ac.uk/7312/ Copyright and moral rights for this thesis are retained by the author A copy can be downloaded for personal non-commercial research or study This thesis cannot be reproduced or quoted extensively from without first obtaining permission in writing from the Author The content must not be changed in any way or sold commercially in any format or medium without the formal permission of the Author When referring to this work, full bibliographic details including the author, title, awarding institution and date of the thesis must be given Glasgow Theses Service http://theses.gla.ac.uk/ [email protected] GPRM: A HIGH PERFORMANCE PROGRAMMING FRAMEWORK FOR MANYCORE PROCESSORS ASHKAN TOUSIMOJARAD SUBMITTED IN FULFILMENT OF THE REQUIREMENTS FOR THE DEGREE OF Doctor of Philosophy SCHOOL OF COMPUTING SCIENCE COLLEGE OF SCIENCE AND ENGINEERING UNIVERSITY OF GLASGOW NOVEMBER 2015 c ASHKAN TOUSIMOJARAD Abstract Processors with large numbers of cores are becoming commonplace. In order to utilise the available resources in such systems, the programming paradigm has to move towards in- creased parallelism. However, increased parallelism does not necessarily lead to better per- formance. Parallel programming models have to provide not only flexible ways of defining parallel tasks, but also efficient methods to manage the created tasks. Moreover, in a general- purpose system, applications residing in the system compete for the shared resources. Thread and task scheduling in such a multiprogrammed multithreaded environment is a significant challenge. In this thesis, we introduce a new task-based parallel reduction model, called the Glasgow Parallel Reduction Machine (GPRM). -

Multi-Core Processors and Systems: State-Of-The-Art and Study of Performance Increase
Multi-Core Processors and Systems: State-of-the-Art and Study of Performance Increase Abhilash Goyal Computer Science Department San Jose State University San Jose, CA 95192 408-924-1000 [email protected] ABSTRACT speedup. Some tasks are easily divided into parts that can be To achieve the large processing power, we are moving towards processed in parallel. In those scenarios, speed up will most likely Parallel Processing. In the simple words, parallel processing can follow “common trajectory” as shown in Figure 2. If an be defined as using two or more processors (cores, computers) in application has little or no inherent parallelism, then little or no combination to solve a single problem. To achieve the good speedup will be achieved and because of overhead, speed up may results by parallel processing, in the industry many multi-core follow as show by “occasional trajectory” in Figure 2. processors has been designed and fabricated. In this class-project paper, the overview of the state-of-the-art of the multi-core processors designed by several companies including Intel, AMD, IBM and Sun (Oracle) is presented. In addition to the overview, the main advantage of using multi-core will demonstrated by the experimental results. The focus of the experiment is to study speed-up in the execution of the ‘program’ as the number of the processors (core) increases. For this experiment, open source parallel program to count the primes numbers is considered and simulation are performed on 3 nodes Raspberry cluster . Obtained results show that execution time of the parallel program decreases as number of core increases. -

Understanding and Guiding the Computing Resource Management in a Runtime Stacking Context
THÈSE PRÉSENTÉE À L’UNIVERSITÉ DE BORDEAUX ÉCOLE DOCTORALE DE MATHÉMATIQUES ET D’INFORMATIQUE par Arthur Loussert POUR OBTENIR LE GRADE DE DOCTEUR SPÉCIALITÉ : INFORMATIQUE Understanding and Guiding the Computing Resource Management in a Runtime Stacking Context Rapportée par : Allen D. Malony, Professor, University of Oregon Jean-François Méhaut, Professeur, Université Grenoble Alpes Date de soutenance : 18 Décembre 2019 Devant la commission d’examen composée de : Raymond Namyst, Professeur, Université de Bordeaux – Directeur de thèse Marc Pérache, Ingénieur-Chercheur, CEA – Co-directeur de thèse Emmanuel Jeannot, Directeur de recherche, Inria Bordeaux Sud-Ouest – Président du jury Edgar Leon, Computer Scientist, Lawrence Livermore National Laboratory – Examinateur Patrick Carribault, Ingénieur-Chercheur, CEA – Examinateur Julien Jaeger, Ingénieur-Chercheur, CEA – Invité 2019 Keywords High-Performance Computing, Parallel Programming, MPI, OpenMP, Runtime Mixing, Runtime Stacking, Resource Allocation, Resource Manage- ment Abstract With the advent of multicore and manycore processors as building blocks of HPC supercomputers, many applications shift from relying solely on a distributed programming model (e.g., MPI) to mixing distributed and shared- memory models (e.g., MPI+OpenMP). This leads to a better exploitation of shared-memory communications and reduces the overall memory footprint. However, this evolution has a large impact on the software stack as applications’ developers do typically mix several programming models to scale over a large number of multicore nodes while coping with their hiearchical depth. One side effect of this programming approach is runtime stacking: mixing multiple models involve various runtime libraries to be alive at the same time. Dealing with different runtime systems may lead to a large number of execution flows that may not efficiently exploit the underlying resources. -
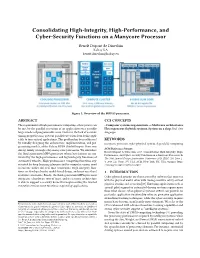
Consolidating High-Integrity, High-Performance, and Cyber-Security Functions on a Manycore Processor
Consolidating High-Integrity, High-Performance, and Cyber-Security Functions on a Manycore Processor Benoît Dupont de Dinechin Kalray S.A. [email protected] Figure 1: Overview of the MPPA3 processor. ABSTRACT CCS CONCEPTS The requirement of high performance computing at low power can • Computer systems organization → Multicore architectures; be met by the parallel execution of an application on a possibly Heterogeneous (hybrid) systems; System on a chip; Real-time large number of programmable cores. However, the lack of accurate languages. timing properties may prevent parallel execution from being appli- cable to time-critical applications. This problem has been addressed KEYWORDS by suitably designing the architecture, implementation, and pro- manycore processor, cyber-physical system, dependable computing gramming models, of the Kalray MPPA (Multi-Purpose Processor ACM Reference Format: Array) family of single-chip many-core processors. We introduce Benoît Dupont de Dinechin. 2019. Consolidating High-Integrity, High- the third-generation MPPA processor, whose key features are mo- Performance, and Cyber-Security Functions on a Manycore Processor. In tivated by the high-performance and high-integrity functions of The 56th Annual Design Automation Conference 2019 (DAC ’19), June 2– automated vehicles. High-performance computing functions, rep- 6, 2019, Las Vegas, NV, USA. ACM, New York, NY, USA, 4 pages. https: resented by deep learning inference and by computer vision, need //doi.org/10.1145/3316781.3323473 to execute under soft real-time constraints. High-integrity func- tions are developed under model-based design, and must meet hard 1 INTRODUCTION real-time constraints. Finally, the third-generation MPPA processor Cyber-physical systems are characterized by software that interacts integrates a hardware root of trust, and its security architecture with the physical world, often with timing-sensitive safety-critical is able to support a security kernel for implementing the trusted physical sensing and actuation [10]. -
Heterogeneous Cpu+Gpu Computing
HETEROGENEOUS CPU+GPU COMPUTING Ana Lucia Varbanescu – University of Amsterdam [email protected] Significant contributions by: Stijn Heldens (U Twente), Jie Shen (NUDT, China), Heterogeneous platforms • Systems combining main processors and accelerators • e.g., CPU + GPU, CPU + Intel MIC, AMD APU, ARM SoC • Everywhere from supercomputers to mobile devices Heterogeneous platforms • Host-accelerator hardware model Accelerator FPGAs Accelerator PCIe / Shared memory ... Host MICs Accelerator GPUs Accelerator CPUs Our focus today … • A heterogeneous platform = CPU + GPU • Most solutions work for other/multiple accelerators • An application workload = an application + its input dataset • Workload partitioning = workload distribution among the processing units of a heterogeneous system Few cores Thousands of Cores 5 Generic multi-core CPU 6 Programming models • Pthreads + intrinsics • TBB – Thread building blocks • Threading library • OpenCL • To be discussed … • OpenMP • Traditional parallel library • High-level, pragma-based • Cilk • Simple divide-and-conquer model abstractionincreasesLevel of 7 A GPU Architecture Offloading model Kernel Host code 9 Programming models • CUDA • NVIDIA proprietary • OpenCL • Open standard, functionally portable across multi-cores • OpenACC • High-level, pragma-based • Different libraries, programming models, and DSLs for different domains Level of abstractionincreasesLevel of CPU vs. GPU 10 ALU ALU CPU Control Low latency, high Throughput: ~ALU 500 GFLOPsALU flexibility. Bandwidth: ~ 60 GB/s Excellent for -

State-Of-The-Art in Heterogeneous Computing
Scientific Programming 18 (2010) 1–33 1 DOI 10.3233/SPR-2009-0296 IOS Press State-of-the-art in heterogeneous computing Andre R. Brodtkorb a,∗, Christopher Dyken a, Trond R. Hagen a, Jon M. Hjelmervik a and Olaf O. Storaasli b a SINTEF ICT, Department of Applied Mathematics, Blindern, Oslo, Norway E-mails: {Andre.Brodtkorb, Christopher.Dyken, Trond.R.Hagen, Jon.M.Hjelmervik}@sintef.no b Oak Ridge National Laboratory, Future Technologies Group, Oak Ridge, TN, USA E-mail: [email protected] Abstract. Node level heterogeneous architectures have become attractive during the last decade for several reasons: compared to traditional symmetric CPUs, they offer high peak performance and are energy and/or cost efficient. With the increase of fine-grained parallelism in high-performance computing, as well as the introduction of parallelism in workstations, there is an acute need for a good overview and understanding of these architectures. We give an overview of the state-of-the-art in heterogeneous computing, focusing on three commonly found architectures: the Cell Broadband Engine Architecture, graphics processing units (GPUs), and field programmable gate arrays (FPGAs). We present a review of hardware, available software tools, and an overview of state-of-the-art techniques and algorithms. Furthermore, we present a qualitative and quantitative comparison of the architectures, and give our view on the future of heterogeneous computing. Keywords: Power-efficient architectures, parallel computer architecture, stream or vector architectures, energy and power consumption, microprocessor performance 1. Introduction the speed of logic gates, making computers smaller and more power efficient. Noyce and Kilby indepen- The goal of this article is to provide an overview of dently invented the integrated circuit in 1958, leading node-level heterogeneous computing, including hard- to further reductions in power and space required for ware, software tools and state-of-the-art algorithms. -

Summarizing CPU and GPU Design Trends with Product Data
Summarizing CPU and GPU Design Trends with Product Data Yifan Sun, Nicolas Bohm Agostini, Shi Dong, and David Kaeli Northeastern University Email: fyifansun, agostini, shidong, [email protected] Abstract—Moore’s Law and Dennard Scaling have guided the products. Equipped with this data, we answer the following semiconductor industry for the past few decades. Recently, both questions: laws have faced validity challenges as transistor sizes approach • Are Moore’s Law and Dennard Scaling still valid? If so, the practical limits of physics. We are interested in testing the validity of these laws and reflect on the reasons responsible. In what are the factors that keep the laws valid? this work, we collect data of more than 4000 publicly-available • Do GPUs still have computing power advantages over CPU and GPU products. We find that transistor scaling remains CPUs? Is the computing capability gap between CPUs critical in keeping the laws valid. However, architectural solutions and GPUs getting larger? have become increasingly important and will play a larger role • What factors drive performance improvements in GPUs? in the future. We observe that GPUs consistently deliver higher performance than CPUs. GPU performance continues to rise II. METHODOLOGY because of increases in GPU frequency, improvements in the thermal design power (TDP), and growth in die size. But we We have collected data for all CPU and GPU products (to also see the ratio of GPU to CPU performance moving closer to our best knowledge) that have been released by Intel, AMD parity, thanks to new SIMD extensions on CPUs and increased (including the former ATI GPUs)1, and NVIDIA since January CPU core counts. -

Heterogeneous Computing in the Edge
Heterogeneous Computing in the Edge Authors: Charles Byers Associate Chief Technical Officer Industrial Internet Consortium [email protected] IIC Journal of Innovation - 1 - Heterogeneous Computing in the Edge INTRODUCTION Heterogeneous computing is the technique where different types of processors with different data path architectures are applied together to optimize the execution of specific computational workloads. Traditional CPUs are often inefficient for the types of computational workloads we will run on edge computing nodes. By adding additional types of processing resources like GPUs, TPUs, and FPGAs, system operation can be optimized. This technique is growing in popularity in cloud data centers, but is nascent in edge computing nodes. This paper will discuss some of the types of processors used in heterogenous computing, leading suppliers of these technologies, example edge use cases that benefit from each type, partitioning techniques to optimize its application, and hardware / software architectures to implement it in edge nodes. Edge computing is a technique through which the computational, storage, and networking functions of an IoT network are distributed to a layer or layers of edge nodes arranged between the bottom of the cloud and the top of IoT devices1. There are many tradeoffs to consider when deciding how to partition workloads between cloud data centers and edge computing nodes, and which processor data path architecture(s) are optimum at each layer for different applications. Figure 1 is an abstracted view of a cloud-edge network that employs heterogenous computing. A cloud data center hosts a number of types of computing resources, with a central interconnect. These computing resources consist of traditional Complex Instruction Set Computing / Reduced Instruction Set Computing (CISC/RISC) servers, but also include Graphics Processing Unit (GPU) accelerators, Tensor Processing Units (TPUs), and Field Programmable Gate Array (FPGA) farms and a few other processor types to help accelerate certain types of workloads. -
Parallel Processing with the MPPA Manycore Processor
Parallel Processing with the MPPA Manycore Processor Kalray MPPA® Massively Parallel Processor Array Benoît Dupont de Dinechin, CTO 14 Novembre 2018 Outline Presentation Manycore Processors Manycore Programming Symmetric Parallel Models Untimed Dataflow Models Kalray MPPA® Hardware Kalray MPPA® Software Model-Based Programming Deep Learning Inference Conclusions Page 2 ©2018 – Kalray SA All Rights Reserved KALRAY IN A NUTSHELL We design processors 4 ~80 people at the heart of new offices Grenoble, Sophia (France), intelligent systems Silicon Valley (Los Altos, USA), ~70 engineers Yokohama (Japan) A unique technology, Financial and industrial shareholders result of 10 years of development Pengpai Page 3 ©2018 – Kalray SA All Rights Reserved KALRAY: PIONEER OF MANYCORE PROCESSORS #1 Scalable Computing Power #2 Data processing in real time Completion of dozens #3 of critical tasks in parallel #4 Low power consumption #5 Programmable / Open system #6 Security & Safety Page 4 ©2018 – Kalray SA All Rights Reserved OUTSOURCED PRODUCTION (A FABLESS BUSINESS MODEL) PARTNERSHIP WITH THE WORLD LEADER IN PROCESSOR MANUFACTURING Sub-contracted production Signed framework agreement with GUC, subsidiary of TSMC (world top-3 in semiconductor manufacturing) Limited investment No expansion costs Production on the basis of purchase orders Page 5 ©2018 – Kalray SA All Rights Reserved INTELLIGENT DATA CENTER : KEY COMPETITIVE ADVANTAGES First “NVMe-oF all-in-one” certified solution * 8x more powerful than the latest products announced by our competitors** -
A Scalable Manycore Simulator for the Epiphany Architecture
A scalable manycore simulator for the Epiphany architecture Master’s thesis in Computer science and engineering Ola Jeppsson Department of Computer Science and Engineering Chalmers University of Technology University of Gothenburg Gothenburg, Sweden 2019 Master’s thesis 2019 A scalable manycore simulator for the Epiphany architecture Ola Jeppsson Department of Computer Science and Engineering Chalmers University of Technology University of Gothenburg Gothenburg, Sweden 2019 A scalable manycore simulator for the Epiphany architecture Ola Jeppsson © Ola Jeppsson, 2019. Supervisor: Sally A. McKee, Department of Computer Science and Engineering Examiner: Mary Sheeran, Department of Computer Science and Engineering Master’s Thesis 2019 Department of Computer Science and Engineering Chalmers University of Technology and University of Gothenburg SE-412 96 Gothenburg Telephone +46 31 772 1000 Typeset in LATEX Gothenburg, Sweden 2019 iv A scalable manycore simulator for the Epiphany architecture Ola Jeppsson Department of Computer Science and Engineering Chalmers University of Technology and University of Gothenburg Abstract The core count of manycore processors increases at a rapid pace; chips with hundreds of cores are readily available, and thousands of cores on a single die have been demon- strated. A scalable model is needed to be able to effectively simulate this class of proces- sors. We implement a parallel functional network-on-chip simulator for the Adapteva Epiphany architecture, which we integrate with an existing single-core simulator to cre- ate a manycore model. To verify the implementation, we run a set of example programs from the Epiphany SDK and the Epiphany toolchain test suite against the simulator. We run a parallel matrix multiplication program against the simulator spread across a vary- ing number of networked computing nodes to verify the MPI implementation.