Picoscope 4000 Series Programmer's Guide I Contents
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Picoscope 3000 Series User Guide 2 Introduction
Welcome 1 1 Welcome The PicoScope 3000 Series of PC Oscilloscopes from Pico Technology is a range of high-specification, real-time measuring instruments that connect to the USB port of your computer. The oscilloscopes obtain their power supply through the USB cable, so they do not need an additional power supply and are therefore highly portable. The 3000 Series consists of two ranges: General-purpose range (PicoScope 3204, 3205 and 3206 variants) High-precision range (PicoScope 3224 and 3424 variants) With the PicoScope software you can use PicoScope 3000 Series PC Oscilloscopes as oscilloscopes and spectrum analysers; and with the PicoLog software you can use them as data loggers. Alternatively, using the API functions, 16 you can develop your own programs to collect and analyse data from the oscilloscope. A typical PicoScope 3000 Series PC Oscilloscope is supplied with the following items: USB cable, for use with USB 1.1 and 2.0 ports Software and Reference CD Installation Guide Copyright 2006-7 Pico Technology Limited. All rights reserved. PS3000044-2 2 PicoScope 3000 Series User Guide 2 Introduction 2.1 Safety symbols Symbol 1: Warning Triangle This symbol indicates that a safety hazard exists on the indicated connections if correct precautions are not taken. Read all safety documentation associated with the product before using it. Symbol 2: Equipotential This symbol indicates that the outer shells of the indicated BNC connectors are all at the same potential (shorted together). You must therefore take necessary precautions to avoid applying a potential across the return connections of the indicated BNC terminals as this may cause a large current to flow, resulting in damage to the product and/or connected equipment. -
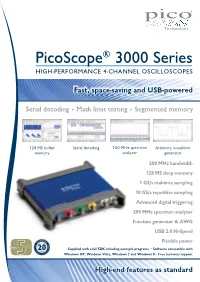
Picoscope® 3000 Series HIGH-PERFORMANCE 4-CHANNEL OSCILLOSCOPES
PicoScope® 3000 Series HIGH-PERFORMANCE 4-CHANNEL OSCILLOSCOPES Fast, space-saving and USB-powered Serial decoding • Mask limit testing • Segmented memory 128 MS buffer Serial decoding 200 MHz spectrum Arbitrary waveform memory analyzer generator 200 MHz bandwidth 128 MS deep memory 1 GS/s real-time sampling 10 GS/s repetitive sampling Advanced digital triggering 200 MHz spectrum analyzer Function generator & AWG USB 2.0 Hi-Speed Flexible power YE AR Supplied with a full SDK including example programs • Software compatible with Windows XP, Windows Vista, Windows 7 and Windows 8• Free technical support High-end features as standard PicoScope 3000 Series 4-Channel Oscilloscopes PicoScope: power, portability and versatility Digital triggering Pico Technology continues to push the limits of USB-powered oscilloscopes. Most digital oscilloscopes sold today still use an analog trigger architecture The new PicoScope 3000 Series offers the highest performance available based on comparators. This can cause time and amplitude errors that from any USB-powered oscilloscope on cannot always be calibrated out. The use of comparators often limits the the market today. trigger sensitivity at high bandwidths and can also create a long trigger The PicoScope 3000 Series has the power “re-arm” delay. and performance for many applications, Since 1991 we have been pioneering the use of fully digital triggering such as design, research, test, education, using the actual digitized data. This reduces trigger errors and allows our service and repair. oscilloscopes to trigger on the smallest signals, even at the full bandwidth. Pico USB-powered oscilloscopes are also Trigger levels and hysteresis can be set with high precision and resolution. -

Scope for Change Adding Variety to Test
www.electronicspecifier.com volume 1, 2016 Scope For Change Adding variety to test Strategy Shift Faster Data Test Challenge Open source – New logo heralds – AXIe digitisers – M2M/IoT need – Software platform new approach show the way new solutions for test applications TAKE YOUR DESIGN TO PRODUCTION • Over 650,000 products in stock • Unbeatable prices on volume orders • Local sales, technical and quoting teams closer to your business uk.farnell.com 04 CSP-BUYER-IBCport-210x297-UK.indd 1 02/10/2015 10:34 Contents Mobile World Congress 2016 10 06 Industry test and measurement heavyweights are preparing for a big week for any company connected to the Mobile world. Keysight Technologies, Rohde & Schwarz and Anritsu will all present developments for 5G testing alongside other wireless test products. New logo, new strategy 10 Tektronix is moving into 2016 with a new logo which heralds a change in its relationship with customers. Six brand principles have been introduced after extensive global research with customers and within the company. The company will now be looking at a collaborative approach based around customer applications Customised applications with AXIe products 12 A partnership between Keysight Technologies with a company called 12 Scientific Equipment has produced a 64 synchronous, multichannel data acquisition system composed of eight M9703A AXIe 12-bit high-speed digitisers/wideband digital receivers in a 14-slot chassis. Testing challenges for cellular M2M/IoT devices 16 Terms such as M2M (“machines talking to machines”) and IoT (“Internet of Things”) have started to invade our daily life, with short-range communication examples such as a watch communicating with a phone via Bluetooth or a Wi-Fi light bulb connected to a home router. -
Picoscope 3000 Quick Start Guide
PicoScope™ 3000 Quick start guide Pico Technology Ltd The Mill House Cambridge Street St. Neots Cambridgeshire PE19 1QB Tel: +44 (0) 1480 396 395 Fax: +44 (0) 1480 396 296 Email: [email protected] Web: www.picotech.com Included with your PicoScope… Your PicoScope 3000 package contains the following components: 1 PicoScope 320x series oscilloscope 1 USB cable 1 Pico Software CD 1 Power adapter (UK, EU or US – selected at time of ordering) 1 Installation guide 1 Quick start guide PicoScope 3000 Quick start… 1) Do not connect the PicoScope 3000 to the PC until software has been installed. 2) Insert CD which should automatically start Pico the installation application 3) Follow the links to install software 4) Follow the instructions on the screen to install PicoScope 5) Restart the PC 6) Click on “PicoScope” in the Windows Start menu to begin using PicoScope 3000. If you are using a scope probe and PicoScope, you should see a small 50Hz or 60Hz mains signal in the oscilloscope window when you touch the scope probe tip with your finger. Connector diagram Ch A) Input channel 1 Ch B) Input channel 2 1) USB port connector 2) 12Vdc 500mA power input 3) External trigger / Signal generator 4) LED. When lit, indicates the PicoScope 3000 series oscilloscope is sampling data PicoScope 3000 overview Oscilloscopes in the new PicoScope 3000 series all feature a high-speed USB 2.0 interface, together with impressive sampling rates, high bandwidths and a large buffer memory. PicoScope oscilloscopes simply connect to the USB port on any standard Windows based PC, making full use of the PCs' processing capabilities, large screens and familiar graphical user interfaces. -
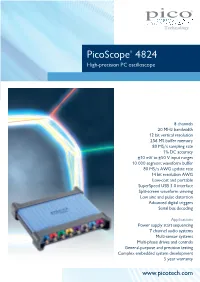
Picoscope 4824 Data Sheet
PicoScope® 4824 High-precision PC oscilloscope 8 channels 20 MHz bandwidth 12 bit vertical resolution 256 MS buffer memory 80 MS/s sampling rate 1% DC accuracy ±10 mV to ±50 V input ranges 10 000 segment waveform buffer 80 MS/s AWG update rate 14 bit resolution AWG Low-cost and portable SuperSpeed USB 3.0 interface Split-screen waveform viewing Low sine and pulse distortion Advanced digital triggers Serial bus decoding Applications Power supply start sequencing 7 channel audio systems Multi-sensor systems Multi-phase drives and controls General-purpose and precision testing Complex embedded system development 5 year warranty www.picotech.com 8 channel oscilloscope With 8 high-resolution analog channels you can easily view audio, ultrasonic, vibration and power waveforms, analyze timing of complex systems, and perform a wide range of precision measurement tasks on multiple inputs at the same time. Although the scope has the same small footprint as Pico’s existing 2- and 4-channel models, the BNC connectors with 20 mm spacing still accept all common probes and accessories. Despite its compact size, there is no compromise on performance. With a high vertical resolution of 12 bits, 20 MHz bandwidth, 256 MS buffer memory, and a fast sampling rate of 80 MS/s, the PicoScope 4824 has the power and functionality to deliver accurate results. It also features deep memory to analyze multiple serial buses such as UART, I2C, SPI, CAN and LIN plus control and driver signals. Arbitrary waveform and function generators In addition, the PicoScope 4824 has a built-in low-distortion, 80 MS/s, 14 bit arbitrary waveform generator (AWG), which can be used to emulate missing sensor signals during product development, or to stress-test a design over the full intended operating range. -

Picoscope 6 PC Oscilloscope Software
SUPERSEDED PicoScope 6 PC Oscilloscope Software User's Guide psw.en r33 Copyright © 2007-2014 Pico Technology Ltd. All rights reserved. SUPERSEDED SUPERSEDED SUPERSEDED SUPERSEDED PicoScope 6 User's Guide I Table of Contents 1 Welcome ....................................................................................................................................1 2 PicoScope 6. ...................................................................................................................................2overview 3 Introduction....................................................................................................................................3 1 Legal statement ........................................................................................................................................3 2 Upgrades ........................................................................................................................................3 3 Trade marks ........................................................................................................................................4 4 Contact information ........................................................................................................................................4 5 How to use this manual........................................................................................................................................4 6 System requirements........................................................................................................................................5 -

Picoscope 6 User's Guide I
PicoScope® 6 PC Oscilloscope Software User's Guide psw.en r50 PicoScope 6 User's Guide I Table of Contents 1 Welcome ............................................................................................................................. 1 2 Introduction ......................................................................................................................... 4 1 Legal statement ..................................................................................................................................... 4 2 Updates ................................................................................................................................................... 4 3 Trademarks ............................................................................................................................................ 4 4 System requirements ............................................................................................................................. 5 3 Using PicoScope for the first time .................................................................................... 6 4 PicoScope and oscilloscope primer ................................................................................. 7 1 Oscilloscope basics ............................................................................................................................... 7 2 PC Oscilloscope basics ......................................................................................................................... 8 3 PicoScope -
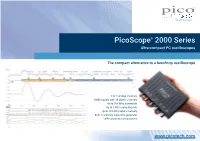
Picoscope 2000 Series Data Sheet
PicoScope® 2000 Series Ultra-compact PC oscilloscopes The compact alternative to a benchtop oscilloscope 2 or 4 analog channels MSO models with 16 digital channels Up to 100 MHz bandwidth Up to 1 GS/s sampling rate Up to 128 MS capture memory Built-in arbitrary waveform generator USB-connected and powered www.picotech.com Introducing the PicoScope 2000 Series Advanced oscilloscope display The PicoScope 2000 Series offers you a choice of 2-channel and 4-channel The PicoScope 6 software takes advantage of the display size, resolution and oscilloscopes, plus mixed-signal oscilloscopes (MSOs) with 2 analog + 16 digital processing power of your PC – in this case displaying four analog signals, a zoomed inputs. All models feature a spectrum analyzer, function generator, arbitrary waveform view of two of the signals (undergoing serial decoding), and a spectrum view of a generator and serial bus analyzer, and the MSO models also include a logic analyzer. third, all at the same time. Unlike a conventional benchtop oscilloscope, the size of the display is limited only by the size of your computer monitor. The software is also easy The PicoScope 2000A models all deliver unbeatable value for money, with excellent to use on touch-screen devices – you can pinch to zoom and drag to scroll. waveform visualization and measurement to 25 MHz for a range of analog and digital electronic and embedded system applications. They are ideal for education, hobby and field service use. The PicoScope 2000B models have the added benefits of deep memory (up to 128 MS), higher bandwidth (up to 100 MHz) and faster waveform update rates, giving you the performance you need to carry out advanced analysis of your waveform, including serial decoding and plotting frequency against time. -

Picoscope 3000D Series Data Sheet
PicoScope® 3000 Series PC oscilloscopes and MSOs Power, portability and performance 2 or 4 analog channels MSO models with 16 digital channels Up to 200 MHz analog bandwidth Up to 512 MS capture memory 1 GS/s real-time sampling 100 000 waveforms per second Built-in arbitrary waveform generator USB 3.0 connected and powered Automatic measurements • Mask limit testing Advanced triggers • Math channels Spectrum analyzer • Serial decoding Free technical support and updates PicoScope, PicoLog and PicoSDK software included 5-year warranty www.picotech.com Introduction The PicoScope 3000 Series PC oscilloscopes are small, light and portable, while offering the high-performance specifications required by engineers in the lab or on the move. These oscilloscopes offer 2 or 4 analog channels, plus an additional 16 digital channels on the mixed-signal (MSO) models. The flexible, high-quality display options enable you to view and analyze each signal in fine detail. All models come with a built-in function generator and arbitrary waveform generator (AWG). Operating together with the PicoScope 6 software, these devices offer an ideal, cost-effective package for many applications, including embedded systems design, research, test, education, service, and repair. PicoScope 3000 Series High bandwidth, high sampling rate, deep memory Despite their compact size and low cost, there is no compromise on performance, with input bandwidths up to 200 MHz. This bandwidth is matched by a real-time sampling rate of up to 1 GS/s, enabling detailed display of high frequencies. For repetitive signals, the maximum effective sampling rate can be boosted to 10 GS/s using equivalent time sampling (ETS) mode. -

Picoscope 6 User's Guide I Table of Contents 1 Welcome
PicoScope® 6 PC Oscilloscope Software User's Guide psw.en r43 Copyright © 2007–2016 Pico Technology Ltd. All rights reserved. PicoScope 6 User's Guide I Table of Contents 1 Welcome .................................................................................................................................... 1 2 PicoScope 6 overview ................................................................................................................. 2 3 Introduction ................................................................................................................................ 3 1 Legal statement .................................................................................................................................. 3 2 Upgrades ............................................................................................................................................ 3 3 Trade marks ....................................................................................................................................... 4 4 System requirements .......................................................................................................................... 4 4 Using PicoScope for the first time ............................................................................................... 5 5 PicoScope and oscilloscope primer ............................................................................................. 6 1 Oscilloscope basics ............................................................................................................................. -
Canoe/Canalyzer Option .Scope
CANoe/CANalyzer Option .Scope User Manual Version 2.12 English Imprint Vector Informatik GmbH Ingersheimer Straße 24 D-70499 Stuttgart Vector reserves the right to modify any information and/or data in this user documentation without notice. This documentation nor any of its parts may be reproduced in any form or by any means without the prior written consent of Vector. To the maximum extent permitted under law, all technical data, texts, graphics, images and their design are protected by copyright law, various international treaties and other applicable law. Any unauthorized use may violate copyright and other applicable laws or regulations. Copyright 2021, Vector Informatik GmbH. Printed in Germany. All rights reserved. 80403 User Manual CANoe/CANalyzer Option .Scope Table of Contents Table of Contents 1 Introduction 3 1.1 About this User Manual 4 1.1.1 Access Helps and Conventions 4 1.1.2 Certification 5 1.1.3 Warranty 5 1.1.4 Support 5 1.1.5 Trademarks 5 1.2 Product Overview 6 2 Installation 9 2.1 Software Requirements 10 2.2 Software Installation 10 2.3 Hardware Installation 11 2.3.1 Vector Scope Bus Probe Calibration 14 2.3.2 Scope Operations with VN8900, VT System and CANoe RT 15 2.3.3 Multi-Scope Operations 16 2.3.4 Scope Operations with CAN Disturbance Interface/FRstress 18 2.4 First Steps 19 © Vector Informatik GmbH Version 2.12 - I - User Manual CANoe/CANalyzer Option .Scope Introduction 1 Introduction In this chapter you find the following information: 1.1 About this User Manual page 4 Access Helps and Conventions Certification Warranty Support Trademarks 1.2 Product Overview page 6 © Vector Informatik GmbH Version 2.12 - 3 - Introduction User Manual CANoe/CANalyzer Option .Scope 1.1 About this User Manual 1.1.1 Access Helps and Conventions To find information The user manual provides you the following access helps: quickly > at the beginning of each chapter you will find a summary of its contents, > in the header you see the current chapter and section, > in the footer you see to which program version the user manual replies. -

Picoscope 5000D Series Oscilloscope Data Sheet
PicoScope® 5000D Series FlexRes® oscilloscopes and MSOs The complete all-rounders FlexRes flexible 8 to 16-bit hardware resolution Up to 200 MHz analog bandwidth 1 GS/s sampling at 8-bit resolution 500 MS/s sampling at 12-bit resolution 62.5 MS/s sampling at 16-bit resolution Up to 512 MS capture memory 16 digital channels (on MSO models) 130 000 waveforms per second Built-in arbitrary waveform generator Serial decoding as standard (20 protocols) Up to 200 MHz spectrum analyzer PicoScope, PicoLog® and PicoSDK® software included Silent, fanless design www.picotech.com Introduction Today’s electronic designs employ a wide memory. The PicoScope 5000D Series range of signal types: analog, digital, also benefits from Pico’s award-winning serial (both high- and low-speed), parallel, DeepMeasure™ feature and FlexRes audio, video, power distribution and so on. flexible resolution. All need to be debugged, measured and Other key features of the PicoScope validated to ensure that the device under 5000D Series include: test is functioning correctly and within specification. • Deep capture memory – from 128 million to 512 million samples To handle this variety of signal types, • 2 or 4 analog channels PicoScope 5000D Series FlexRes • Mixed-signal models add 16 digital oscilloscopes provide 8 to 16 bits of channels vertical resolution, with up to 200 MHz • Serial decoding – analyze 20 protocols bandwidth and 1 GS/s sampling speed. (more in development) You select the most appropriate hardware • USB 3.0 connection for continuous resolution for the requirements of each high-speed data streaming measurement. • Small, light and portable PicoScopes include advanced features Supported by the free and regularly such as mask limit testing, serial updated PicoScope 6 software, these decoding, advanced triggering, automatic devices offer an ideal, cost-effective measurements, math channels (including package for many applications, including the ability to plot frequency and duty cycle design, research, test, education, service against time), XY mode and segmented and repair.