Novel Radar Techniques for Humanitarian Demining
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Cognitive Radar (STO-TR-SET-227)
NORTH ATLANTIC TREATY SCIENCE AND TECHNOLOGY ORGANIZATION ORGANIZATION AC/323(SET-227)TP/947 www.sto.nato.int STO TECHNICAL REPORT TR-SET-227 Cognitive Radar (Radar cognitif) Final Report of Task Group SET-227. Published October 2020 Distribution and Availability on Back Cover NORTH ATLANTIC TREATY SCIENCE AND TECHNOLOGY ORGANIZATION ORGANIZATION AC/323(SET-227)TP/947 www.sto.nato.int STO TECHNICAL REPORT TR-SET-227 Cognitive Radar (Radar cognitif) Final Report of Task Group SET-227. The NATO Science and Technology Organization Science & Technology (S&T) in the NATO context is defined as the selective and rigorous generation and application of state-of-the-art, validated knowledge for defence and security purposes. S&T activities embrace scientific research, technology development, transition, application and field-testing, experimentation and a range of related scientific activities that include systems engineering, operational research and analysis, synthesis, integration and validation of knowledge derived through the scientific method. In NATO, S&T is addressed using different business models, namely a collaborative business model where NATO provides a forum where NATO Nations and partner Nations elect to use their national resources to define, conduct and promote cooperative research and information exchange, and secondly an in-house delivery business model where S&T activities are conducted in a NATO dedicated executive body, having its own personnel, capabilities and infrastructure. The mission of the NATO Science & Technology Organization -

THE UNIVERSITY of HULL an Evaluation of the Performance Of
THE UNIVERSITY OF HULL An Evaluation of the Performance of Multi-static Handheld Ground Penetrating Radar using Full Wave Inversion for Landmine Detection Being a Thesis submitted for the Degree of Doctor of Philosophy in the University of Hull by Suki Dauda Sule, MSc, B.Eng. (Hons) June 2018 Acknowledgments I would like to begin by thanking my first supervisor, Dr. Kevin Paulson for his support and guidance before and throughout my research. His enthusiasm, optimism and availability have been critical to the completion of this work despite the challenges. To my second supervisor Mr. Nick Riley whose persistent constructive criticism and suggestions always helped to point me in the right direction. My special gratitude goes to my sponsor, the Petroleum Technology Development Fund (PTDF) of Nigeria for providing me with an exceptional full scholarship, one of the best in the world, without which this research would not have been possible. I’m also grateful to the humanitarian demining research teams at the University of Manchester led by Professors Anthony Peyton and William Lionheart for their support. I thank the Computer Simulation Technology (CST) GmbH technical support for the CST STUDIO SUITE. I will not forget the administrative support of Jo Arnett and Glen Jack in processing my numerous requests, expense claims and other academic requisitions. To my colleagues, my laboratory mate and other PhD students in the Electronic Engineering Department for their moral support and encouragement. I’m very thankful to Pastor Isaac Aleshinloye and the Amazing Grace Chapel, Hull family for providing me with a place of spiritual support, friendship, opportunity for community service and a place to spend my time outside of academic study productively. -
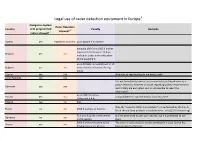
Legal Use of Radar Detection Equipment in Europe1 Navigation System Radar Detectors Country with Programmed Penalty Remarks Allowed? 3 Radars Allowed? 2
Legal use of radar detection equipment in Europe1 Navigation System Radar Detectors Country with programmed Penalty Remarks allowed? 3 radars allowed? 2 Austria yes legislation not clear up to 4000 € if no license between 100 € and 1000 € and/or imprisonment between 15 days Belgium yes no and up to 1 year and confiscation of the equipment up to 50 BGN and withdrawal of 10 Bulgaria yes no control points of control driving ticket Cyprus yes yes Attempts to regulate legally are being made Czech Republic yes yes It is not forbidden to own or use a radar detector (also known as a police detector). However all canals regarding police, rescue services Denmark yes yes and military are encrypted, so it is not possible to reach the information. up to 100 fine unites Estonia yes no not prohibited to own the device, but so to use it (1 fine unit = 4 €) Finland yes no fine Only the "assistant d'aide à la conduite" are authorized by the law. A France no no 1500 € and loss of 3 points list of the conform products is available here : http://a2c.infocert.org/ 75 € and 4 points in the central it is not prohibited to own such devices, but it is prohibited to use Germany no no traffic registry them 2000 € and confiscation of the The use of a radar detector can be permitted if a state licence has Greece yes no driving licence for 30 days been granted to the user Legal use of radar detection equipment in Europe1 Navigation System Radar Detectors Country with programmed Penalty Remarks allowed? 3 radars allowed? 2 Hungary yes yes Iceland yes yes Ireland no no no specific penalty yes (the Police also provides a map of from €761,00 to €3.047,00 (Art. -

LONG RANGE Radar/Laser Detector User's Manual R7
R7 LONG RANGE Radar/Laser Detector User’s Manual © 2019 Uniden America Corporation Issue 1, March 2019 Irving, Texas Printed in Korea CUSTOMER CARE At Uniden®, we care about you! If you need assistance, please do NOT return this product to your place of purchase Save your receipt/proof of purchase for warranty. Quickly find answers to your questions by: • Reading this User’s Manual. • Visiting our customer support website at www.uniden.com. Images in this manual may differ slightly from your actual product. DISCLAIMER: Radar detectors are illegal in some states. Some states prohibit mounting any object on your windshield. Check applicable law in your state and any state in which you use the product to verify that using and mounting a radar detector is legal. Uniden radar detectors are not manufactured and/or sold with the intent to be used for illegal purposes. Drive safely and exercise caution while using this product. Do not change settings of the product while driving. Uniden expects consumer’s use of these products to be in compliance with all local, state, and federal law. Uniden expressly disclaims any liability arising out of or related to your use of this product. CONTENTS CUSTOMER CARE .......................................................................................................... 2 R7 OVERVIEW .............................................................................................5 FEATURES ....................................................................................................................... -
The Journal of ERW and Mine Action Issue 15.3 (2011)
The Journal of Conventional Weapons Destruction Volume 15 Issue 3 The Journal of ERW and Mine Action Article 1 October 2011 The Journal of ERW and Mine Action Issue 15.3 (2011) CISR JOURNAL Center for International Stabilization and Recovery at JMU (CISR) Follow this and additional works at: https://commons.lib.jmu.edu/cisr-journal Part of the Other Public Affairs, Public Policy and Public Administration Commons, and the Peace and Conflict Studies Commons Recommended Citation JOURNAL, CISR (2011) "The Journal of ERW and Mine Action Issue 15.3 (2011)," The Journal of ERW and Mine Action : Vol. 15 : Iss. 3 , Article 1. Available at: https://commons.lib.jmu.edu/cisr-journal/vol15/iss3/1 This Article is brought to you for free and open access by the Center for International Stabilization and Recovery at JMU Scholarly Commons. It has been accepted for inclusion in The Journal of Conventional Weapons Destruction by an authorized editor of JMU Scholarly Commons. For more information, please contact [email protected]. JOURNAL: The Journal of ERW and Mine Action Issue 15.3 Issue 15.3 | Fall 2011 Focus: Cluster Munitions Feature: Government Stability & Mine-action Support Plus: Notes from the Field and Research & Development Published by JMU Scholarly Commons, 2011 1 The Journal of Conventional Weapons Destruction, Vol. 15, Iss. 3 [2011], Art. 1 ON THE WEB: http://cisr.jmu.edu/journal/15.3/index.htm The Journal of ERW and Mine Action Center for International Stabilization and Recovery at James Madison University Cover Photo Issue 15.3 Fall 2011 | ISSN: 2154-1469 Cluster bombs, such as these in Lebanon, continue to kill civilians in many Print Date: November 2011 countries of the world. -

Toward a Mine-Free World Executive Summary
Landmine Monitor Report 2004: Toward a Mine-Free World Executive Summary Landmine Monitor Core Group Human Rights Watch Handicap International Kenya Coalition Against Landmines Mines Action Canada Norwegian People’s Aid Copyright © October 2004 by Human Rights Watch Landmine Monitor Report 2004—Executive Summary Embargoed until 18 November 2004 2 All rights reserved. Printed in the United States of America This report was printed on recycled paper using vegetable based ink. ISBN: 1-56432-327-7 Library of Congress Control Number: 2004112567 Cover photograph © Fred Clarke, International Committee of the Red Cross (ICRC), August 2002 Cover design by Rafael Jiménez For a copy of Landmine Monitor Report 2004, please contact: International Campaign to Ban Landmines www.icbl.org/lm Email: [email protected] Human Rights Watch 1630 Connecticut Avenue NW, Suite 500, Washington, DC 20009, USA Tel: +1 (202) 612-4321, Fax: +1 (202) 612-4333, Email: [email protected] www.hrw.org Handicap International rue de Spa 67, B-1000 Brussels, BELGIUM Tel: +32 (2) 286-50-59, Fax: +32 (2) 230-60-30, Email: [email protected] www.handicap-international.be Kenya Coalition Against Landmines PO Box 57217, 00200 Nairobi, KENYA Tel: +254 (20) 573-099 /572-388, Fax: + 254 (20) 573-099 Email: [email protected] www.k-cal.org Mines Action Canada 1 Nicolas Street, Suite 1502, Ottawa, Ont K1N 7B7, CANADA Tel: +1 (613) 241-3777, Fax: +1 (613) 244-3410, Email: [email protected] www.minesactioncanada.org Norwegian People’s Aid PO Box 8844, Youngstorget NO-0028, Oslo, -

Scoping Study of the Effects of Aging on Landmines Daniele Ressler Center for International Stabilization and Recovery, [email protected]
James Madison University JMU Scholarly Commons CISR Studies and Reports CISR Resources 6-2009 Scoping Study of the Effects of Aging on Landmines Daniele Ressler Center for International Stabilization and Recovery, [email protected] Follow this and additional works at: http://commons.lib.jmu.edu/cisr-studiesreports Part of the Environmental Policy Commons, Other Environmental Sciences Commons, Peace and Conflict Studies Commons, and the Policy Design, Analysis, and Evaluation Commons Recommended Citation Ressler, Daniele, "Scoping Study of the Effects of Aging on Landmines" (2009). CISR Studies and Reports. Paper 2. http://commons.lib.jmu.edu/cisr-studiesreports/2 This Article is brought to you for free and open access by the CISR Resources at JMU Scholarly Commons. It has been accepted for inclusion in CISR Studies and Reports by an authorized administrator of JMU Scholarly Commons. For more information, please contact [email protected]. Scoping Study of the Effects of Aging on Landmines Scoping Study of the Effects of Aging on Landmines Presented to United States Department of State Office of Weapons Removal and Abatement June 1, 2009 Table of Contents 1. Executive Summary .............................................................. 3 2. Introduction ....................................................................... 4 2.1. Background to the problem................................................. 4 2.2. Funding ........................................................................ 4 2.3. Project goal .................................................................. -

Owner's Manual
OWNER’S MANUAL Download this Manual at: v1gen2.info/manual With exclusive Analyzer Modes: ® N All -Bogeys ® N Logic ® N Advanced-Logic powered Contents Welcome to Full Coverage Full Coverage .........................................................................................1-2 What’s Included .....................................................................................3 Controls and Functions. ..........................................................................4 Mounting — Where and How. ...............................................................5 How to connect to 12V, USB jack...........................................................5 How to connect a headphone ................................................................6 How to set Muted Volume ......................................................................6 Display readings .....................................................................................6 How to set Analyzer Modes ....................................................................7 How to get our free app ..........................................................................7 How to connect to your phone ...............................................................7 Lighter Adapter. ......................................................................................8 Installation — Direct-Wire Power Adapter ..............................................8 Changing the Fuse ..................................................................................9 Concealed Display -

TM-43-0001-36 Ammunition Data Sheets for Land Mines
TM 43-0001-36 TECHNICAL MANUAL ARMY AMMUNITION DATA SHEETS FOR LAND MINES (FSC 1345) DISTRIBUTION STATEMENT A: Approved for public release; distribution is unlimited. HEADQUARTERS, DEPARTMENT OF THE ARMY SEPTEMBER 1994 TM 43-0001-36 C2 CHANGE HEADQUARTERS DEPARTMENT OF THE ARMY NO. 2 Washington, DC., 15 September 1997 ARMY AMMUNITION DATA SHEETS (LAND MINES (FSC 1345)) DISTRIBUTION STATEMENT A: Approved for public release; distribution unlimited. TM 43-0001-36, dated 01 September 1994, is changed as follows: 1. Cross out information on inside cover. The information is changed and placed on page a. 2. Remove old pages and insert new pages as indicated below. Changed material is indicated by a vertical bar in the margin of the page. Added or revised illustrations are indicated by a vertical bar adjacent to the identification number. Remove pages Insert pages i and ii i and ii 3-7 and 3-8 3-7 and 3-8 3. File this change sheet in front of the publication for reference purposes. By Order of the Secretary of the Army: DENNIS J. REIMER General, United States Army Chief of Staff Official: JOEL B. HUDSON Administrative Assistant to the Secretary of the Army 03953 Distribution: To be distributed in accordance with IDN 340853, with requirements for TM 43-000-36. TM 43-0001-36 C1 CHANGE HEADQUARTERS DEPARTMENT OF THE ARMY NO. 1 Washington, DC, 30 June 1997 ARMY AMMUNITION DATA SHEETS (LAND MINES (FSC 1345)) TM 43-0001-36, dated 01 September 1994, is changed as follows: 1. Cross out information on inside cover. -

The Impact of Radar Detectors on Highway Traffic Safety
U.S. Department of Transportation National Highway Traffic Safety Administration DOT HS 807 518 August 1988 Final Report The Impact of Radar Detectors on Highway Traffic Safety This document is available to the public from the National Technical Information Service, Springfield, Virginia 22161. i The United States Government does not endorse products or manufacturers. Trade or manufacturers' names appear only because they are considered essential to the object of this report. TECHNICAL REPORT STANDARD TITLE PATE 1. Report No. 2. Government Accession No. 3. Recipient's Catalog No. DOT HS 807 518 4. T,tli and Subtitle 5. Report Dote August, 1988 The Impact of Radar Detectors 6. Performing Organization Code on Highway Traffic Safety 7 Author's. 8. Performing Organ zation Report No. Pezoldt, V.J. and Brackett, R.Q. RF7095 9. Performing Organization Name and Address 10. Work Unit No. Texas Transportation Institute -^ Human Factors Div. VI 11. Contract or Grant No. TTI/CE Building, Suite 601 DTNH22-87-C-05111 Texas A&M University, College Station, TX 77843-3135 13. Type of Report and Period Covered .12. Sponsoring Agency Nome and Address Department of Transportation National Highway Traffic Safety Administration Final 400 Seventh Street, SW 14. Sponsoring Agency Code Washington, D.C. 20590 15. Supplementary Notes 16. Abstract As part of a program to examine the relationship between highway traffic safety and the use of radar detectors, comparisons were made between speed distributions when a detectable radar transmission was present and when it was not. The impact of detectors on speeds varied as a function of the states sampled, highway facility type and vehicle classification. -

Classification of Buried Objects Using Acoustic Waves
Minoufiya University Faculty of Electronic Engineering Department of Electronics and Electrical Communications Engineering Classification of Buried Objects Using Acoustic Waves A Thesis Submitted for the Degree of M. Sc. in Electronic Engineering, Communications Engineering, Department of Electronics and Communications Engineering By Eng. Emad Abd Elhalim Elsayed Elshazly B. Sc. in Electronics and Electrical Communications Engineering, Faculty of Electronic Engineering, Minoufiya University, Menouf 2004 Supervisors Prof. Mohamed F. El-Kordy Prof. in Electronics and Electrical Communications Engineering Department, Faculty of Electronic Engineering, Minoufiya University Prof. Sayed M. El-Araby Chairman of Atomic Energy Authority Dr. Osama F. Zahran Lecturer in Electronics and Electrical Communications Engineering Department, Faculty of Electronic Engineering, Minoufiya University 2012 Minoufiya University Faculty of Electronic Engineering Department of Electronics and Electrical Communications Engineering Classification of Buried Objects Using Acoustic Waves A Thesis Submitted for the Degree of M. Sc. in Electronic Engineering, Communications Engineering, Department of Electronics and Communications Engineering By Eng. Emad Abd Elhalim Elsayed Elshazly B. Sc. in Electronics and Electrical Communications Engineering, Faculty of Electronic Engineering, Minoufiya University, Menouf, 2004 Supervisors Prof. Mohamed F. El-Kordy ( ) Department of Electronics and Electrical Communications Engineering, Faculty of Electronic Engineering, Minoufiya -

LONG RANGE Radar/Laser Detector User's Manual R7
R7 LONG RANGE Radar/Laser Detector User’s Manual © 2020 Uniden America Corporation Issue 2, February 2020 Irving, Texas Printed in Korea CUSTOMER CARE At Uniden®, we care about you! If you need assistance, please do NOT return this product to your place of purchase Save your receipt/proof of purchase for warranty. Quickly find answers to your questions by: • Reading this User’s Manual. • Visiting our customer support website at www.uniden.com. Images in this manual may differ slightly from your actual product. DISCLAIMER: Radar detectors are illegal in some states. Some states prohibit mounting any object on your windshield. Check applicable law in your state and any state in which you use the product to verify that using and mounting a radar detector is legal. Uniden radar detectors are not manufactured and/or sold with the intent to be used for illegal purposes. Drive safely and exercise caution while using this product. Do not change settings of the product while driving. Uniden expects consumer’s use of these products to be in compliance with all local, state, and federal law. Uniden expressly disclaims any liability arising out of or related to your use of this product. RELEASE NOTES - V1.27 New/Improved • MRCD detection delay improved. • Rear Balance mode added. • Overspeed alarm and Radar alert alternate when both are detected at the same time. • All Threat display signal lockout and multiple signal displays improved. FIXES • Auto Mute Volume range changed to 0 - 7. • Arrow and Band Color apply to All Threat display. • MRCD now has priority over Ka alerts.