Aas 19-096 Gps Based Autonomous Navigation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Lunar Programs
LUNAR PROGRAMS NASA is leading a sustainable return to the Moon Aerospace is partnered with NASA to with commercial and international partners to return humans to the Moon in every expand human presence in space and gather phase and journey, including the: new knowledge and opportunities. In 2017, Space › Planning and supporting the Policy Directive-1 called for a renewed emphasis on first lifecycle review of the commercial and international partnerships, return Gateway Initiative of humans to the Moon for long-term exploration and utilization followed by human missions to Mars. › Design, systems engineering and Aerospace is partnered with NASA in this endeavor integration, and operational concepts and is involved in every phase and journey. of the EVA system Artist’s conception of a gateway habitat. Image credit: NASA Humans must return to the moon for long-term › Ground testing of the NEXTStep deep exploration and utilization of deep space, but lunar space habitat module prototypes exploration is more than a stepping stone to Mars missions. The phased plan includes › Design and test of the Orion sending missions to the moon and cislunar space for exploration and study, and the capsule avionics construction of the Deep Space Gateway, a space station intended to orbit the moon. Aerospace provides support to these missions in areas such as systems engineering and integration, program management, and various subsystem expertise. Current Lunar Programs GATEWAY INITIATIVE NASA’s Gateway is conceived to be an exploration and science outpost in orbit around the moon that will enable human crewed missions to both cislunar space and the moon’s surface, meet scientific discovery and exploration objectives, and demonstrate and prove enabling technologies through commercial and international partnerships. -

Maxar Technologies with Respect to Future Events, Financial Performance and Operational Capabilities
Leading Innovation in the New Space Economy Howard L. Lance President and Chief Executive Officer Forward-Looking Statement This presentation contains forward-looking statements and information, which reflect the current view of Maxar Technologies with respect to future events, financial performance and operational capabilities. The forward-looking statements in this presentation include statements as to managements’ expectations with respect to: the benefits of the transaction and strategic and integration opportunities; the company’s plans, objectives, expectations and intentions; expectations for sales growth, synergies, earnings and performance; shareholder value; and other statements that are not historical facts. Although management of the Company believes that the expectations and assumptions on which such forward-looking statements are based are reasonable, undue reliance should not be placed on the forward-looking statements because the Company can give no assurance that they will prove to be correct. Any such forward-looking statements are subject to various risks and uncertainties which could cause actual results and experience to differ materially from the anticipated results or expectations expressed in this presentation. Additional information concerning these risk factors can be found in the Company’s filings with Canadian securities regulatory authorities, which are available online under the Company’s profile at www.sedar.com, the Company’s filings with the United States Securities and Exchange Commission, or on the Company’s website at www.maxar.com, and in DigitalGlobe’s filings with the SEC, including Item 1A of DigitalGlobe’s Annual Report on Form 10-K for the year ended December 31, 2016. The forward-looking statements contained in this presentation are expressly qualified in their entirety by the foregoing cautionary statements and are based upon data available as of the date of this release and speak only as of such date. -

Concept for a Crewed Lunar Lander Operating from the Lunar Orbiting Platform-Gateway
69th International Astronautical Congress (IAC), Bremen, Germany, 1-5 October 2018. Copyright © 2018 by Lockheed Martin Corporation. Published by the IAF, with permission and released to the IAF to publish in all forms. IAC-18.A5.1.4x46653 Concept for a Crewed Lunar Lander Operating from the Lunar Orbiting Platform-Gateway Timothy Cichana*, Stephen A. Baileyb, Adam Burchc, Nickolas W. Kirbyd aSpace Exploration Architect, P.O. Box 179, MS H3005, Lockheed Martin Space, Denver, Colorado, U.S.A. 80201, [email protected] bPresident, 8100 Shaffer Parkway, Unit 130, Deep Space Systems, Inc., Littleton, Colorado, 80127-4124, [email protected] cDesign Engineer / Graphic Artist, 8341 Sangre de Christo Rd, Deep Space Systems, Inc., Littleton, Colorado, 80127, [email protected] dSystems Engineer, Advanced Programs, P.O. Box 179, MS H3005, Lockheed Martin Space, Denver, Colorado, U.S.A. 80201, [email protected] * Corresponding Author Abstract Lockheed Martin is working with NASA on the development of the Lunar Orbiting Platform – Gateway, or Gateway. Positioned in the vicinity of the Moon, the Gateway allows astronauts to demonstrate operations beyond Low Earth Orbit for months at a time. The Gateway is evolvable, flexible, modular, and is a precursor and mission demonstrator directly on the path to Mars. Mars Base Camp is Lockheed Martin's vision for sending humans to Mars. Operations from an orbital base camp will build on a strong foundation of today's technologies and emphasize scientific exploration as mission cornerstones. Key aspects of Mars Base Camp include utilizing liquid oxygen and hydrogen as the basis for a nascent water-based economy and the development of a reusable lander/ascent vehicle. -
International Space Station Program Mobile Servicing System (MSS) To
SSP 42004 Revision E Mobile Servicing System (MSS) to User (Generic) Interface Control Document Part I International Space Station Program Revision E, May 22, 1997 Type 1 Approved by NASA National Aeronautics and Space Administration International Space Station Program Johnson Space Center Houston, Texas Contract No. NAS15–10000 SSP 42004, Part 1, Revision E May 22, 1997 REVISION AND HISTORY PAGE REV. DESCRIPTION PUB. DATE C Totally revised Space Station Freedom Document into an International Space Station Alpha Document 03–14–94 D Revision D reference PIRNs 42004–CS–0004A, 42004–NA–0002, 42004–NA–0003, TBD 42004–NA–0004, 42004–NA–0007D, 42004–NA–0008A, 42004–NA–0009C, 42004–NA–0010B, 42004–NA–0013A SSP 42004, Part 1, Revision E May 22, 1997 INTERNATIONAL SPACE STATION PROGRAM MOBILE SERVICING SYSTEM TO USER (GENERIC) INTERFACE CONTROL DOCUMENT MAY 22, 1997 CONCURRENCE PREPARED BY: PRINT NAME ORGN SIGNATURE DATE CHECKED BY: PRINT NAME ORGN SIGNATURE DATE SUPERVISED BY (BOEING): PRINT NAME ORGN SIGNATURE DATE SUPERVISED BY (NASA): PRINT NAME ORGN SIGNATURE DATE DQA: PRINT NAME ORGN SIGNATURE DATE i SSP 42004, Part 1, Revision E May 22, 1997 NASA/CSA INTERNATIONAL SPACE STATION PROGRAM MOBILE SERVICING SYSTEM (MSS) TO USER INTERFACE CONTROL DOCUMENT MAY 22, 1997 Print Name For NASA DATE Print Name For CSA DATE ii SSP 42004, Part 1, Revision E May 22, 1997 PREFACE SSP 42004, Mobile Servicing System (MSS) to User Interface Control Document (ICD) Part I shall be implemented on all new Program contractual and internal activities and shall be included in any existing contracts through contract changes. -

NASA's Lunar Orbital Platform-Gatway
The Space Congress® Proceedings 2018 (45th) The Next Great Steps Feb 28th, 9:00 AM NASA's Lunar Orbital Platform-Gatway Tracy Gill NASA/KSC Technology Strategy Manager Follow this and additional works at: https://commons.erau.edu/space-congress-proceedings Scholarly Commons Citation Gill, Tracy, "NASA's Lunar Orbital Platform-Gatway" (2018). The Space Congress® Proceedings. 17. https://commons.erau.edu/space-congress-proceedings/proceedings-2018-45th/presentations/17 This Event is brought to you for free and open access by the Conferences at Scholarly Commons. It has been accepted for inclusion in The Space Congress® Proceedings by an authorized administrator of Scholarly Commons. For more information, please contact [email protected]. National Aeronautics and Space Administration NASA’s Lunar Orbital Platform- Gateway Tracy Gill NASA/Kennedy Space Center Exploration Research & Technology Programs February 28, 2018 45th Space Congress Space Policy Directive-1 “Lead an innovative and sustainable program of exploration with commercial and international partners to enable human expansion across the solar system and to bring back to Earth new knowledge and opportunities. Beginning with missions beyond low-Earth orbit, the United States will lead the return of humans to the Moon for long-term exploration and utilization, followed by human missions to Mars and other destinations.” 2 LUNAR EXPLORATION CAMPAIGN 3 4 STRATEGIC PRINCIPLES FOR SUSTAINABLE EXPLORATION • FISCAL REALISM • ECONOMIC OPPORTUNITY Implementable in the near-term with the buying -

Gateway Avionics Concept of Operations for Command and Data
Gateway Avionics Concept of Operations for Command and Data Handling Architecture Paul Muri, PhD Svetlana Hanson Martin Sonnier NASA Johnson Space Center NASA Johnson Space Center NASA Johnson Space Center 2101 NASA Parkway 2101 NASA Parkway 2101 NASA Parkway Houston, TX 77058 Houston, TX 77058 Houston, TX 77058 [email protected] [email protected] [email protected] Abstract—By harnessing data handling lessons learned from the International Space Station, Gateway has adopted a highly 1. INTRODUCTION reliable, deterministic, and redundant three-plane Time- Triggered Ethernet network implementation that is capable of With NASA, international partners, and commercial partners handling three distinct types of traffic: Time-Triggered (TT), preparing to establish a human presence in lunar orbit, a Rate Constrained (RC) and Best Effort (BE). This paper will robust implementation of avionics is of the utmost offer an overview of the operational capabilities of the Gateway importance to the Gateway Program’s success. Without Network defined in the Network Concept of Operations, technological advances in C&DH, previous missions would focusing on the initial architecture of the Gateway Spacecraft not have been possible. Previous lessons-learned with ISS Inter-Element Network. The initial Gateway modules include Habitation, Power & Propulsion, Logistics, Human Lunar will help shape the design philosophy of the network Lander, and Orion Crew Capsule. The Gateway Inter-Element architecture used in the Gateway Program. Network Concept -
PROJECT PENGUIN Robotic Lunar Crater Resource Prospecting VIRGINIA POLYTECHNIC INSTITUTE & STATE UNIVERSITY Kevin T
PROJECT PENGUIN Robotic Lunar Crater Resource Prospecting VIRGINIA POLYTECHNIC INSTITUTE & STATE UNIVERSITY Kevin T. Crofton Department of Aerospace & Ocean Engineering TEAM LEAD Allison Quinn STUDENT MEMBERS Ethan LeBoeuf Brian McLemore Peter Bradley Smith Amanda Swanson Michael Valosin III Vidya Vishwanathan FACULTY SUPERVISOR AIAA 2018 Undergraduate Spacecraft Design Dr. Kevin Shinpaugh Competition Submission i AIAA Member Numbers and Signatures Ethan LeBoeuf Brian McLemore Member Number: 918782 Member Number: 908372 Allison Quinn Peter Bradley Smith Member Number: 920552 Member Number: 530342 Amanda Swanson Michael Valosin III Member Number: 920793 Member Number: 908465 Vidya Vishwanathan Dr. Kevin Shinpaugh Member Number: 608701 Member Number: 25807 ii Table of Contents List of Figures ................................................................................................................................................................ v List of Tables ................................................................................................................................................................vi List of Symbols ........................................................................................................................................................... vii I. Team Structure ........................................................................................................................................................... 1 II. Introduction .............................................................................................................................................................. -
In-Space Assembly of Large Telescopes for Exoplanet
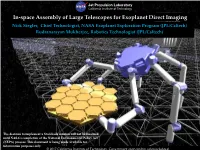
In-space Assembly of Large Telescopes for Exoplanet Direct Imaging Nick Siegler, Chief Technologist, NASA Exoplanet Exploration Program (JPL/Caltech) Rudranarayan Mukherjee, Robotics Technologist (JPL/Caltech) The decision to implement a Starshade mission will not be finalized until NASA’s completion of the National Environmental Policy Act (NEPA) process. This document is being made available for information purposes only. © 2017 California Institute of Technology. Government sponsorship acknowledged. Aperture size limited by launch vehicle Future science needs will require increasingly large telescopes In-Space Large Aperture Telescope Assembly Evolvable Space Telescope (NGAS) 5 6 4 1 3 2 3 4 m 1 2 Polidan et al. 2016 3 In-Space Large Aperture Telescope Assembly Using the Deep Space Gateway (cis-Lunar orbit) to assemble NASA GSFC 4 In-Space Large Aperture Telescope Upgrade Telescope returns from ESL2 for servicing at EML1 Courtesy: Future In-Space Operations (FISO) working group (2007) 5 In-Space Large Aperture Telescope Assembly Free-fliers (e.g. Orion) and assembly module docked to spacecraft bus NASA GSFC 6 DARPA Orbital Express (2007) • Multiple OEDMS autonomous berthing and docking maneuvers In-space firsts: • Transfer of fuel • Transfer of a battery through the use of 3-m long Astro robotic arm NEXTSat DARPA/Boeing/MDA/Ball Aerospace jpl.nasa.gov 7 Robotic Servicing Missions DARPA Robotic Servicing of Geosynchronous Satellites (RSGS) (SSL) DARPAjpl.nasa.gov Robotic Servicing Missions Restore-L (NASA GSFC) • Refueling an existing -

HRP and SLPSRA Lunar Gateway Utilization Space Administration
National Aeronautics and HRP and SLPSRA Lunar Gateway Utilization Space Administration Kevin Sato, Ph.D. Lunar Exploration Lead Deputy Program Scientist, Space Biology NASA Joint Working Group Meeting Moscow, Russia December 10 -12, 2019 Current priority focuses: • Gateway-only utilization • Commercial Lunar Payloads Services NASA Gateway Payloads Working Group The Gateway Payloads Working Group (GPWG) is tasked with developing an integrated NASA science and research strategy for Gateway payload assignments • GPWG Leadership – AES: Jacob Bleacher, Debra Needham • Jacob Bleacher is the NASA Representative to the Gateway Utilization Coordination Panel – Gateway Program Office: Dina Contella, Robert Hanley • Human Exploration and Operations Mission Directorate – AES Technology – SLPSRA: Kevin Sato – HRP: Mike Waid – Space Weather – SCaN • Science Mission Directorate – DAAX – Helio – Planetary – Earth • Science Technology Mission Directorate HSRB Approved List 10/2018 4 Gateway Phase 1 HRP Payloads Summary Payload Function Cargo Transfer Bag Expose pharmaceutical formularies to the deep space spaceflight (or vehicle) environment [radiation, CO2, etc.] Science to evaluate degradation and toxicity over time Use existing Gateway Unobtrusively measure crew operational performance tasks in deep space systems/ops Use existing Gateway Unobtrusively measure team-task performance in deep space: Gateway crew interactions with Lunar lander systems/ops party Wearable device (e.g. Unobtrusively monitor sleep-wake patterns, activity levels, and circadian -
Downloaded for Infrastructure GIS Data
NATIONAL TECHNICAL DOCUMENT FOR ESTABLISHING CARTOGRAPHIC BASE IN INDIA Generation of Large Scale (1:10,000; 1:2,000 & Lesser) Maps for Disaster Management and Planning March 2016 National Disaster Management Authority Government of India CONTENTS Table of Contents Foreword i Preface ii Acknowledgement iii Table of Contents iv-vii List of Figures and Tables viii-ix Abbreviations x-xii Glossary of Terms xiii-xv Generation of National Topographic Database (NTDB) For 1:10,000; 1:2,000 & 1 1 Lesser Scale 1.1 Mapping at 1:10,000; 1:2,000 & Lesser Scale 2 1.2 NTDB on 1:10,000; 1:2,000 & Lesser Scale- A National Need 2 2 Geographical Information System for Disaster Management 3 2.1 GIS in Different Phases of Disaster Management 3-6 2.2 GIS database for Disaster Management 7-8 2.3 Scope for developing a GIS database for Disaster Management 8 2.4 Projection System 8 2.5 Positional Accuracy 8 2.6 Technology 8 2.7 Functional Requirements for Database Management 8-9 3 Critical Facilities Mapping (CFM) 10 3.1 Defining Critical Facilities for Mapping 10-11 4 Geo-referencing of Satellite Imagery 12-13 Technology for 1:10,000 Scale Mapping 14 5 Various Methodologies Available for Preparing Maps of Scale1:10,000 from 15 Images 5.1 Satellite Imaging 15 5.2 Aerial Photography 15 5.3 Comparison Between Satellite Imaging and Aerial Mapping 16 5.3.1 General Differences 16 5.3.2 Comparison of Accuracy of Imaging 17-18 5.4 Comparison of Ground Sampling Distance (GSD) for Satellite Imaging and 18-19 Aerial Photogrammetry 5.5 Aerial Mapping 20 5.5.1 Map Checking -

On-Orbit Assembly of Space Assets: a Path to Affordable and Adaptable Space Infrastructure
CENTER FOR SPACE POLICY AND STRATEGY FEBRUARY 2018 ON-ORBIT ASSEMBLY OF SPACE ASSETS: A PATH TO AFFORDABLE AND ADAPTABLE SPACE INFRASTRUCTURE DANIELLE PISKORZ AND KAREN L. JONES THE AEROSPACE CORPORATION © 2018 The Aerospace Corporation. All trademarks, service marks, and trade names contained herein are the property of their respective owners. Approved for public release; distribution unlimited. OTR201800234 DANIELLE PISKORZ Dr. Danielle Piskorz is a member of the technical staff in The Aerospace Corporation’s Visual and Infrared Sensor Systems Department. She provides data and mission performance analysis in the area of space situational awareness. Her space policy experience derives from positions at the Science and Technology Policy Institute and the National Academies of Sciences, Engineering, and Medicine, where she contributed to a broad range of projects in commercial and civil space. She holds a Ph.D. in planetary science from the California Institute of Technology and a B.S. in physics from Massachusetts Institute of Technology. KAREN L. JONES Karen Jones is a senior project leader with The Aerospace Corporation’s Center for Space Policy and Strategy. She has experience and expertise in the disciplines of technology strategy, program evaluation, and regulatory and policy analysis spanning the public sector, telecommunications, aerospace defense, energy, and environmental industries. She has an M.B.A. from the Yale School of Management. CONTRIBUTORS The authors would like to acknowledge contributions from Roy Nakagawa, Henry Helvajian, and Thomas Heinsheimer of The Aerospace Corporation and David Barnhart of the University of Southern California. ABOUT THE CENTER FOR SPACE POLICY AND STRATEGY The Center for Space Policy and Strategy is a specialized research branch within The Aerospace Corporation, a nonprofit organization that operates a federally funded research and development center providing objective technical analysis for programs of national significance. -

The Apollo Moon Landings Were a Water- Shed Moment for Humanity
Retracing the FOOTPRINTS Downloaded from http://asmedigitalcollection.asme.org/memagazineselect/article-pdf/143/3/49/6690390/me-2021-may4.pdf by guest on 24 September 2021 The Apollo Moon landings were a water- shed moment for humanity. NASA’s new program to return astronauts to the lunar surface could well be a steppingstone to the cosmos. By Michael Abrams he plaque left on the Sea of Tranquility by Neil Armstrong and Buzz Aldrin bore a simple mes- sage: “We came in peace for all Mankind.” But the Moon Race was part of a contest between nations and ideological systems and commanded military-scale budgets from both the United TStates and the Soviet Union. Today, more than 50 years after the Apollo 11 Moon landing (and nearly 30 since the end of the USSR), NASA is engaged in a new program to send astronauts back to the lunar surface. It ought to be a cinch, as our computers, design tools, and materials are radically more advanced than they were for the first trips to the Moon. But the demands of space travel haven’t changed at all—it is still a difficult and dangerous busi- ness—and dictate the shape of space exploration more than our high-tech gadgetry. Some elements of the new program, called Artemis, will seem like carbon copies of the 1960s roadmap to the Moon. The first step—which could happen as early as this November—will be to launch an unmanned crew capsule to lunar orbit, dipping to within 62 miles of the surface before returning to Earth and splashing down in the Pacific.