Lecture 2: Different Memory and Variable Types Memory CPU
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Memory Hierarchy Memory Hierarchy
Memory Key challenge in modern computer architecture Lecture 2: different memory no point in blindingly fast computation if data can’t be and variable types moved in and out fast enough need lots of memory for big applications Prof. Mike Giles very fast memory is also very expensive [email protected] end up being pushed towards a hierarchical design Oxford University Mathematical Institute Oxford e-Research Centre Lecture 2 – p. 1 Lecture 2 – p. 2 CPU Memory Hierarchy Memory Hierarchy Execution speed relies on exploiting data locality 2 – 8 GB Main memory 1GHz DDR3 temporal locality: a data item just accessed is likely to be used again in the near future, so keep it in the cache ? 200+ cycle access, 20-30GB/s spatial locality: neighbouring data is also likely to be 6 used soon, so load them into the cache at the same 2–6MB time using a ‘wide’ bus (like a multi-lane motorway) L3 Cache 2GHz SRAM ??25-35 cycle access 66 This wide bus is only way to get high bandwidth to slow 32KB + 256KB main memory ? L1/L2 Cache faster 3GHz SRAM more expensive ??? 6665-12 cycle access smaller registers Lecture 2 – p. 3 Lecture 2 – p. 4 Caches Importance of Locality The cache line is the basic unit of data transfer; Typical workstation: typical size is 64 bytes 8 8-byte items. ≡ × 10 Gflops CPU 20 GB/s memory L2 cache bandwidth With a single cache, when the CPU loads data into a ←→ 64 bytes/line register: it looks for line in cache 20GB/s 300M line/s 2.4G double/s ≡ ≡ if there (hit), it gets data At worst, each flop requires 2 inputs and has 1 output, if not (miss), it gets entire line from main memory, forcing loading of 3 lines = 100 Mflops displacing an existing line in cache (usually least ⇒ recently used) If all 8 variables/line are used, then this increases to 800 Mflops. -
Data Storage the CPU-Memory
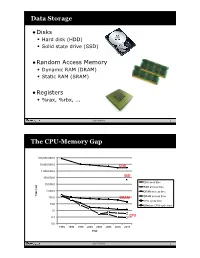
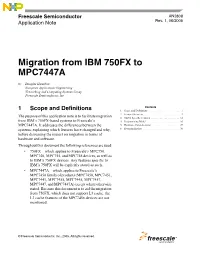
Data Storage •Disks • Hard disk (HDD) • Solid state drive (SSD) •Random Access Memory • Dynamic RAM (DRAM) • Static RAM (SRAM) •Registers • %rax, %rbx, ... Sean Barker 1 The CPU-Memory Gap 100,000,000.0 10,000,000.0 Disk 1,000,000.0 100,000.0 SSD Disk seek time 10,000.0 SSD access time 1,000.0 DRAM access time Time (ns) Time 100.0 DRAM SRAM access time CPU cycle time 10.0 Effective CPU cycle time 1.0 0.1 CPU 0.0 1985 1990 1995 2000 2003 2005 2010 2015 Year Sean Barker 2 Caching Smaller, faster, more expensive Cache 8 4 9 10 14 3 memory caches a subset of the blocks Data is copied in block-sized 10 4 transfer units Larger, slower, cheaper memory Memory 0 1 2 3 viewed as par@@oned into “blocks” 4 5 6 7 8 9 10 11 12 13 14 15 Sean Barker 3 Cache Hit Request: 14 Cache 8 9 14 3 Memory 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Sean Barker 4 Cache Miss Request: 12 Cache 8 12 9 14 3 12 Request: 12 Memory 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Sean Barker 5 Locality ¢ Temporal locality: ¢ Spa0al locality: Sean Barker 6 Locality Example (1) sum = 0; for (i = 0; i < n; i++) sum += a[i]; return sum; Sean Barker 7 Locality Example (2) int sum_array_rows(int a[M][N]) { int i, j, sum = 0; for (i = 0; i < M; i++) for (j = 0; j < N; j++) sum += a[i][j]; return sum; } Sean Barker 8 Locality Example (3) int sum_array_cols(int a[M][N]) { int i, j, sum = 0; for (j = 0; j < N; j++) for (i = 0; i < M; i++) sum += a[i][j]; return sum; } Sean Barker 9 The Memory Hierarchy The Memory Hierarchy Smaller On 1 cycle to access CPU Chip Registers Faster Storage Costlier instrs can L1, L2 per byte directly Cache(s) ~10’s of cycles to access access (SRAM) Main memory ~100 cycles to access (DRAM) Larger Slower Flash SSD / Local network ~100 M cycles to access Cheaper Local secondary storage (disk) per byte slower Remote secondary storage than local (tapes, Web servers / Internet) disk to access Sean Barker 10. -

Make the Most out of Last Level Cache in Intel Processors In: Proceedings of the Fourteenth Eurosys Conference (Eurosys'19), Dresden, Germany, 25-28 March 2019
http://www.diva-portal.org Postprint This is the accepted version of a paper presented at EuroSys'19. Citation for the original published paper: Farshin, A., Roozbeh, A., Maguire Jr., G Q., Kostic, D. (2019) Make the Most out of Last Level Cache in Intel Processors In: Proceedings of the Fourteenth EuroSys Conference (EuroSys'19), Dresden, Germany, 25-28 March 2019. ACM Digital Library N.B. When citing this work, cite the original published paper. Permanent link to this version: http://urn.kb.se/resolve?urn=urn:nbn:se:kth:diva-244750 Make the Most out of Last Level Cache in Intel Processors Alireza Farshin∗† Amir Roozbeh∗ KTH Royal Institute of Technology KTH Royal Institute of Technology [email protected] Ericsson Research [email protected] Gerald Q. Maguire Jr. Dejan Kostić KTH Royal Institute of Technology KTH Royal Institute of Technology [email protected] [email protected] Abstract between Central Processing Unit (CPU) and Direct Random In modern (Intel) processors, Last Level Cache (LLC) is Access Memory (DRAM) speeds has been increasing. One divided into multiple slices and an undocumented hashing means to mitigate this problem is better utilization of cache algorithm (aka Complex Addressing) maps different parts memory (a faster, but smaller memory closer to the CPU) in of memory address space among these slices to increase order to reduce the number of DRAM accesses. the effective memory bandwidth. After a careful study This cache memory becomes even more valuable due to of Intel’s Complex Addressing, we introduce a slice- the explosion of data and the advent of hundred gigabit per aware memory management scheme, wherein frequently second networks (100/200/400 Gbps) [9]. -
Migration from IBM 750FX to MPC7447A by Douglas Hamilton European Applications Engineering Networking and Computing Systems Group Freescale Semiconductor, Inc
Freescale Semiconductor AN2808 Application Note Rev. 1, 06/2005 Migration from IBM 750FX to MPC7447A by Douglas Hamilton European Applications Engineering Networking and Computing Systems Group Freescale Semiconductor, Inc. Contents 1 Scope and Definitions 1. Scope and Definitions . 1 2. Feature Overview . 2 The purpose of this application note is to facilitate migration 3. 7447A Specific Features . 12 from IBM’s 750FX-based systems to Freescale’s 4. Programming Model . 16 MPC7447A. It addresses the differences between the 5. Hardware Considerations . 27 systems, explaining which features have changed and why, 6. Revision History . 30 before discussing the impact on migration in terms of hardware and software. Throughout this document the following references are used: • 750FX—which applies to Freescale’s MPC750, MPC740, MPC755, and MPC745 devices, as well as to IBM’s 750FX devices. Any features specific to IBM’s 750FX will be explicitly stated as such. • MPC7447A—which applies to Freescale’s MPC7450 family of products (MPC7450, MPC7451, MPC7441, MPC7455, MPC7445, MPC7457, MPC7447, and MPC7447A) except where otherwise stated. Because this document is to aid the migration from 750FX, which does not support L3 cache, the L3 cache features of the MPC745x devices are not mentioned. © Freescale Semiconductor, Inc., 2005. All rights reserved. Feature Overview 2 Feature Overview There are many differences between the 750FX and the MPC7447A devices, beyond the clear differences of the core complex. This section covers the differences between the cores and then other areas of interest including the cache configuration and system interfaces. 2.1 Cores The key processing elements of the G3 core complex used in the 750FX are shown below in Figure 1, and the G4 complex used in the 7447A is shown in Figure 2. -
Caches & Memory
Caches & Memory Hakim Weatherspoon CS 3410 Computer Science Cornell University [Weatherspoon, Bala, Bracy, McKee, and Sirer] Programs 101 C Code RISC-V Assembly int main (int argc, char* argv[ ]) { main: addi sp,sp,-48 int i; sw x1,44(sp) int m = n; sw fp,40(sp) int sum = 0; move fp,sp sw x10,-36(fp) for (i = 1; i <= m; i++) { sw x11,-40(fp) sum += i; la x15,n } lw x15,0(x15) printf (“...”, n, sum); sw x15,-28(fp) } sw x0,-24(fp) li x15,1 sw x15,-20(fp) Load/Store Architectures: L2: lw x14,-20(fp) lw x15,-28(fp) • Read data from memory blt x15,x14,L3 (put in registers) . • Manipulate it .Instructions that read from • Store it back to memory or write to memory… 2 Programs 101 C Code RISC-V Assembly int main (int argc, char* argv[ ]) { main: addi sp,sp,-48 int i; sw ra,44(sp) int m = n; sw fp,40(sp) int sum = 0; move fp,sp sw a0,-36(fp) for (i = 1; i <= m; i++) { sw a1,-40(fp) sum += i; la a5,n } lw a5,0(x15) printf (“...”, n, sum); sw a5,-28(fp) } sw x0,-24(fp) li a5,1 sw a5,-20(fp) Load/Store Architectures: L2: lw a4,-20(fp) lw a5,-28(fp) • Read data from memory blt a5,a4,L3 (put in registers) . • Manipulate it .Instructions that read from • Store it back to memory or write to memory… 3 1 Cycle Per Stage: the Biggest Lie (So Far) Code Stored in Memory (also, data and stack) compute jump/branch targets A memory register ALU D D file B +4 addr PC B control din dout M inst memory extend new imm forward pc Stack, Data, Code detect unit hazard Stored in Memory Instruction Instruction Write- ctrl ctrl ctrl Fetch Decode Execute Memory Back IF/ID -

Stealing the Shared Cache for Fun and Profit
IT 13 048 Examensarbete 30 hp Juli 2013 Stealing the shared cache for fun and profit Moncef Mechri Institutionen för informationsteknologi Department of Information Technology Abstract Stealing the shared cache for fun and profit Moncef Mechri Teknisk- naturvetenskaplig fakultet UTH-enheten Cache pirating is a low-overhead method created by the Uppsala Architecture Besöksadress: Research Team (UART) to analyze the Ångströmlaboratoriet Lägerhyddsvägen 1 effect of sharing a CPU cache Hus 4, Plan 0 among several cores. The cache pirate is a program that will actively and Postadress: carefully steal a part of the shared Box 536 751 21 Uppsala cache by keeping its working set in it. The target application can then be Telefon: benchmarked to see its dependency on 018 – 471 30 03 the available shared cache capacity. The Telefax: topic of this Master Thesis project 018 – 471 30 00 is to implement a cache pirate and use it on Ericsson’s systems. Hemsida: http://www.teknat.uu.se/student Handledare: Erik Berg Ämnesgranskare: David Black-Schaffer Examinator: Ivan Christoff IT 13 048 Sponsor: Ericsson Tryckt av: Reprocentralen ITC Contents Acronyms 2 1 Introduction 3 2 Background information 5 2.1 A dive into modern processors . 5 2.1.1 Memory hierarchy . 5 2.1.2 Virtual memory . 6 2.1.3 CPU caches . 8 2.1.4 Benchmarking the memory hierarchy . 13 3 The Cache Pirate 17 3.1 Monitoring the Pirate . 18 3.1.1 The original approach . 19 3.1.2 Defeating prefetching . 19 3.1.3 Timing . 20 3.2 Stealing evenly from every set . -

Cache-Aware Roofline Model: Upgrading the Loft
1 Cache-aware Roofline model: Upgrading the loft Aleksandar Ilic, Frederico Pratas, and Leonel Sousa INESC-ID/IST, Technical University of Lisbon, Portugal ilic,fcpp,las @inesc-id.pt f g Abstract—The Roofline model graphically represents the attainable upper bound performance of a computer architecture. This paper analyzes the original Roofline model and proposes a novel approach to provide a more insightful performance modeling of modern architectures by introducing cache-awareness, thus significantly improving the guidelines for application optimization. The proposed model was experimentally verified for different architectures by taking advantage of built-in hardware counters with a curve fitness above 90%. Index Terms—Multicore computer architectures, Performance modeling, Application optimization F 1 INTRODUCTION in Tab. 1. The horizontal part of the Roofline model cor- Driven by the increasing complexity of modern applica- responds to the compute bound region where the Fp can tions, microprocessors provide a huge diversity of compu- be achieved. The slanted part of the model represents the tational characteristics and capabilities. While this diversity memory bound region where the performance is limited is important to fulfill the existing computational needs, it by BD. The ridge point, where the two lines meet, marks imposes challenges to fully exploit architectures’ potential. the minimum I required to achieve Fp. In general, the A model that provides insights into the system performance original Roofline modeling concept [10] ties the Fp and the capabilities is a valuable tool to assist in the development theoretical bandwidth of a single memory level, with the I and optimization of applications and future architectures. -
ARM-Architecture Simulator Archulator
Embedded ECE Lab Arm Architecture Simulator University of Arizona ARM-Architecture Simulator Archulator Contents Purpose ............................................................................................................................................ 2 Description ...................................................................................................................................... 2 Block Diagram ............................................................................................................................ 2 Component Description .............................................................................................................. 3 Buses ..................................................................................................................................................... 3 µP .......................................................................................................................................................... 3 Caches ................................................................................................................................................... 3 Memory ................................................................................................................................................. 3 CoProcessor .......................................................................................................................................... 3 Using the Archulator ...................................................................................................................... -

IBM Power Systems Performance Report Apr 13, 2021
IBM Power Performance Report Power7 to Power10 September 8, 2021 Table of Contents 3 Introduction to Performance of IBM UNIX, IBM i, and Linux Operating System Servers 4 Section 1 – SPEC® CPU Benchmark Performance 4 Section 1a – Linux Multi-user SPEC® CPU2017 Performance (Power10) 4 Section 1b – Linux Multi-user SPEC® CPU2017 Performance (Power9) 4 Section 1c – AIX Multi-user SPEC® CPU2006 Performance (Power7, Power7+, Power8) 5 Section 1d – Linux Multi-user SPEC® CPU2006 Performance (Power7, Power7+, Power8) 6 Section 2 – AIX Multi-user Performance (rPerf) 6 Section 2a – AIX Multi-user Performance (Power8, Power9 and Power10) 9 Section 2b – AIX Multi-user Performance (Power9) in Non-default Processor Power Mode Setting 9 Section 2c – AIX Multi-user Performance (Power7 and Power7+) 13 Section 2d – AIX Capacity Upgrade on Demand Relative Performance Guidelines (Power8) 15 Section 2e – AIX Capacity Upgrade on Demand Relative Performance Guidelines (Power7 and Power7+) 20 Section 3 – CPW Benchmark Performance 19 Section 3a – CPW Benchmark Performance (Power8, Power9 and Power10) 22 Section 3b – CPW Benchmark Performance (Power7 and Power7+) 25 Section 4 – SPECjbb®2015 Benchmark Performance 25 Section 4a – SPECjbb®2015 Benchmark Performance (Power9) 25 Section 4b – SPECjbb®2015 Benchmark Performance (Power8) 25 Section 5 – AIX SAP® Standard Application Benchmark Performance 25 Section 5a – SAP® Sales and Distribution (SD) 2-Tier – AIX (Power7 to Power8) 26 Section 5b – SAP® Sales and Distribution (SD) 2-Tier – Linux on Power (Power7 to Power7+) -

Multi-Tier Caching Technology™
Multi-Tier Caching Technology™ Technology Paper Authored by: How Layering an Application’s Cache Improves Performance Modern data storage needs go far beyond just computing. From creative professional environments to desktop systems, Seagate provides solutions for almost any application that requires large volumes of storage. As a leader in NAND, hybrid, SMR and conventional magnetic recording technologies, Seagate® applies different levels of caching and media optimization to benefit performance and capacity. Multi-Tier Caching (MTC) Technology brings the highest performance and areal density to a multitude of applications. Each Seagate product is uniquely tailored to meet the performance requirements of a specific use case with the right memory, NAND, and media type and size. This paper explains how MTC Technology works to optimize hard drive performance. MTC Technology: Key Advantages Capacity requirements can vary greatly from business to business. While the fastest performance can be achieved using Dynamic Random Access Memory (DRAM) cache, the data in the DRAM is not persistent through power cycles and DRAM is very expensive compared to other media. NAND flash data survives through power cycles but it is still very expensive compared to a magnetic storage medium. Magnetic storage media cache offers good performance at a very low cost. On the downside, media cache takes away overall disk drive capacity from PMR or SMR main store media. MTC Technology solves this dilemma by using these diverse media components in combination to offer different levels of performance and capacity at varying price points. By carefully tuning firmware with appropriate cache types and sizes, the end user can experience excellent overall system performance. -

CUDA 11 and A100 - WHAT’S NEW? Markus Hrywniak, 23Rd June 2020 TOPICS for TODAY
CUDA 11 AND A100 - WHAT’S NEW? Markus Hrywniak, 23rd June 2020 TOPICS FOR TODAY Ampere architecture – A100, powering DGX–A100, HGX-A100... and soon, FZ Jülich‘s JUWELS Booster New CUDA 11 Toolkit release Overview of features Talk next week: Third generation Tensor Cores GTC talks go into much more details. See references! 2 HGX-A100 4-GPU HGX-A100 8-GPU • 4 A100 with NVLINK • 8 A100 with NVSwitch 3 HIERARCHY OF SCALES Multi-System Rack Multi-GPU System Multi-SM GPU Multi-Core SM Unlimited Scale 8 GPUs 108 Multiprocessors 2048 threads 4 AMDAHL’S LAW serial section parallel section serial section Amdahl’s Law parallel section Shortest possible runtime is sum of serial section times Time saved serial section Some Parallelism Increased Parallelism Infinite Parallelism Program time = Parallel sections take less time Parallel sections take no time sum(serial times + parallel times) Serial sections take same time Serial sections take same time 5 OVERCOMING AMDAHL: ASYNCHRONY & LATENCY serial section parallel section serial section Split up serial & parallel components parallel section serial section Some Parallelism Task Parallelism Infinite Parallelism Program time = Parallel sections overlap with serial sections Parallel sections take no time sum(serial times + parallel times) Serial sections take same time 6 OVERCOMING AMDAHL: ASYNCHRONY & LATENCY CUDA Concurrency Mechanisms At Every Scope CUDA Kernel Threads, Warps, Blocks, Barriers Application CUDA Streams, CUDA Graphs Node Multi-Process Service, GPU-Direct System NCCL, CUDA-Aware MPI, NVSHMEM 7 OVERCOMING AMDAHL: ASYNCHRONY & LATENCY Execution Overheads Non-productive latencies (waste) Operation Latency Network latencies Memory read/write File I/O .. -

Cache & Memory System
COMP 212 Computer Organization & Architecture Re-Cap of Lecture #2 • The text book is required for the class – COMP 212 Fall 2008 You will need it for homework, project, review…etc. – To get it at a good price: Lecture 3 » Check with senior student for used book » Check with university book store Cache & Memory System » Try this website: addall.com » Anyone got the book ? Care to share experience ? Comp 212 Computer Org & Arch 1 Z. Li, 2008 Comp 212 Computer Org & Arch 2 Z. Li, 2008 Components & Connections Instruction – CPU: processing data • Instruction word has 2 parts – Mem: store data – Opcode: eg, 4 bit, will have total 24=16 different instructions – I/O & Network: exchange data with – Operand: address or immediate number an outside world instruction can operate on – Connection: Bus, a – In von Neumann computer, instruction and data broadcasting medium share the same memory space: – Address space: 2W for address width W. • eg, 8 bit has 28=256 addressable space, • 216=65536 addressable space (room number) Comp 212 Computer Org & Arch 3 Z. Li, 2008 Comp 212 Computer Org & Arch 4 Z. Li, 2008 Instruction Cycle Register & Memory Operations During Instruction Cycle • Instruction Cycle has 3 phases • Pay attention to the – Instruction fetch: following registers’ • pull instruction from mem to IR, according to PC change over cycles: • CPU can’t process memory data directly ! – Instruction execution: – PC, IR • Operate on the operand, either load or save data to – AC memory, or move data among registers, or ALU – Mem at [940], [941] operations – Interruption Handling: to achieve parallel operation with slower IO device • Sequential • Nested Comp 212 Computer Org & Arch 5 Z.