Introduction to MIPS Assembly Language Programming Charles W
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Lab 7: Floating-Point Addition 0.0
Lab 7: Floating-Point Addition 0.0 Introduction In this lab, you will write a MIPS assembly language function that performs floating-point addition. You will then run your program using PCSpim (just as you did in Lab 6). For testing, you are provided a program that calls your function to compute the value of the mathematical constant e. For those with no assembly language experience, this will be a long lab, so plan your time accordingly. Background You should be familiar with the IEEE 754 Floating-Point Standard, which is described in Section 3.6 of your book. (Hopefully you have read that section carefully!) Here we will be dealing only with single precision floating- point values, which are formatted as follows (this is also described in the “Floating-Point Representation” subsec- tion of Section 3.6 in your book): Sign Exponent (8 bits) Significand (23 bits) 31 30 29 ... 24 23 22 21 ... 0 Remember that the exponent is biased by 127, which means that an exponent of zero is represented by 127 (01111111). The exponent is not encoded using 2s-complement. The significand is always positive, and the sign bit is kept separately. Note that the actual significand is 24 bits long; the first bit is always a 1 and thus does not need to be stored explicitly. This will be important to remember when you write your function! There are several details of IEEE 754 that you will not have to worry about in this lab. For example, the expo- nents 00000000 and 11111111 are reserved for special purposes that are described in your book (representing zero, denormalized numbers and NaNs). -
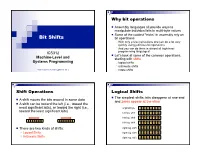
Bit Shifts Bit Operations, Logical Shifts, Arithmetic Shifts, Rotate Shifts
Why bit operations Assembly languages all provide ways to manipulate individual bits in multi-byte values Some of the coolest “tricks” in assembly rely on Bit Shifts bit operations With only a few instructions one can do a lot very quickly using judicious bit operations And you can do them in almost all high-level ICS312 programming languages! Let’s look at some of the common operations, Machine-Level and starting with shifts Systems Programming logical shifts arithmetic shifts Henri Casanova ([email protected]) rotate shifts Shift Operations Logical Shifts The simplest shifts: bits disappear at one end A shift moves the bits around in some data and zeros appear at the other A shift can be toward the left (i.e., toward the most significant bits), or toward the right (i.e., original byte 1 0 1 1 0 1 0 1 toward the least significant bits) left log. shift 0 1 1 0 1 0 1 0 left log. shift 1 1 0 1 0 1 0 0 left log. shift 1 0 1 0 1 0 0 0 There are two kinds of shifts: right log. shift 0 1 0 1 0 1 0 0 Logical Shifts right log. shift 0 0 1 0 1 0 1 0 Arithmetic Shifts right log. shift 0 0 0 1 0 1 0 1 Logical Shift Instructions Shifts and Numbers Two instructions: shl and shr The common use for shifts: quickly multiply and divide by powers of 2 One specifies by how many bits the data is shifted In decimal, for instance: multiplying 0013 by 10 amounts to doing one left shift to obtain 0130 Either by just passing a constant to the instruction multiplying by 100=102 amounts to doing two left shifts to obtain 1300 Or by using whatever -
Chapter 1 Introduction to Computers, Programs, and Java
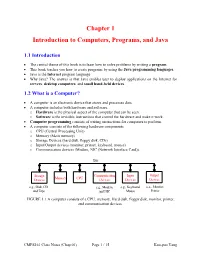
Chapter 1 Introduction to Computers, Programs, and Java 1.1 Introduction • The central theme of this book is to learn how to solve problems by writing a program . • This book teaches you how to create programs by using the Java programming languages . • Java is the Internet program language • Why Java? The answer is that Java enables user to deploy applications on the Internet for servers , desktop computers , and small hand-held devices . 1.2 What is a Computer? • A computer is an electronic device that stores and processes data. • A computer includes both hardware and software. o Hardware is the physical aspect of the computer that can be seen. o Software is the invisible instructions that control the hardware and make it work. • Computer programming consists of writing instructions for computers to perform. • A computer consists of the following hardware components o CPU (Central Processing Unit) o Memory (Main memory) o Storage Devices (hard disk, floppy disk, CDs) o Input/Output devices (monitor, printer, keyboard, mouse) o Communication devices (Modem, NIC (Network Interface Card)). Bus Storage Communication Input Output Memory CPU Devices Devices Devices Devices e.g., Disk, CD, e.g., Modem, e.g., Keyboard, e.g., Monitor, and Tape and NIC Mouse Printer FIGURE 1.1 A computer consists of a CPU, memory, Hard disk, floppy disk, monitor, printer, and communication devices. CMPS161 Class Notes (Chap 01) Page 1 / 15 Kuo-pao Yang 1.2.1 Central Processing Unit (CPU) • The central processing unit (CPU) is the brain of a computer. • It retrieves instructions from memory and executes them. -

The UN Works for International Peace and Security
Did You Know? 7 Since 1945, the UN has assisted in negotiating more than 170 peace settlements that have ended regional conflicts. 7 The United Nations played a role in bringing about independence in more than 80 countries that are now sovereign nations. 7 Over 500 multinational treaties – on human rights, terrorism, international crime, refugees, disarmament, commodities and the oceans – have been enacted through the efforts of the United Nations. 7 The World Food Programme, the world’s largest humanitarian agency, reaches on average 90 million hungry people in 80 countries every year. 7 An estimated 90 per cent of global conflict-related deaths since 1990 have been civilians, and 80 percent of these have been women and children. 7 If each poor person on the planet had the same energy-rich lifestyle as an average person in Germany or the United Kingdom, four planets would be needed to safely cope with the pollution. That figure rises to nine planets when compared with the average of the United States or Canada. 07-26304—DPI/1888/Rev.3—August 2008—15M Everything You Always Wanted to Know About the United Nations FOR STUDENTS AT INTERMEDIATE AND SECONDARY LEVELS United Nations Department of Public Information New York, 2010 An introduction to the United Nations i Material contained in this book is not subject to copyright. It may be freely reproduced, provided acknowledgement is given to the UNITED NATIONS. For further information please contact: Visitors Services, Department of Public Information, United Nations, New York, NY 10017 Fax 212-963-0071; E-mail: [email protected] All photos by UN Photo, unless otherwise noted Published by the United Nations Department of Public Information Printed by the United Nations Publishing Section, New York Table of contents 1 Introduction to the United Nations . -

Binary and Hexadecimal
Binary and Hexadecimal Binary and Hexadecimal Introduction This document introduces the binary (base two) and hexadecimal (base sixteen) number systems as a foundation for systems programming tasks and debugging. In this document, if the base of a number might be ambiguous, we use a base subscript to indicate the base of the value. For example: 45310 is a base ten (decimal) value 11012 is a base two (binary) value 821716 is a base sixteen (hexadecimal) value Why do we need binary? The binary number system (also called the base two number system) is the native language of digital computers. No matter how elegantly or naturally we might interact with today’s computers, phones, and other smart devices, all instructions and data are ultimately stored and manipulated in the computer as binary digits (also called bits, where a bit is either a 0 or a 1). CPUs (central processing units) and storage devices can only deal with information in this form. In a computer system, absolutely everything is represented as binary values, whether it’s a program you’re running, an image you’re viewing, a video you’re watching, or a document you’re writing. Everything, including text and images, is represented in binary. In the “old days,” before computer programming languages were available, programmers had to use sequences of binary digits to communicate directly with the computer. Today’s high level languages attempt to shield us from having to deal with binary at all. However, there are a few reasons why it’s important for programmers to understand the binary number system: 1. -

The Hexadecimal Number System and Memory Addressing
C5537_App C_1107_03/16/2005 APPENDIX C The Hexadecimal Number System and Memory Addressing nderstanding the number system and the coding system that computers use to U store data and communicate with each other is fundamental to understanding how computers work. Early attempts to invent an electronic computing device met with disappointing results as long as inventors tried to use the decimal number sys- tem, with the digits 0–9. Then John Atanasoff proposed using a coding system that expressed everything in terms of different sequences of only two numerals: one repre- sented by the presence of a charge and one represented by the absence of a charge. The numbering system that can be supported by the expression of only two numerals is called base 2, or binary; it was invented by Ada Lovelace many years before, using the numerals 0 and 1. Under Atanasoff’s design, all numbers and other characters would be converted to this binary number system, and all storage, comparisons, and arithmetic would be done using it. Even today, this is one of the basic principles of computers. Every character or number entered into a computer is first converted into a series of 0s and 1s. Many coding schemes and techniques have been invented to manipulate these 0s and 1s, called bits for binary digits. The most widespread binary coding scheme for microcomputers, which is recog- nized as the microcomputer standard, is called ASCII (American Standard Code for Information Interchange). (Appendix B lists the binary code for the basic 127- character set.) In ASCII, each character is assigned an 8-bit code called a byte. -
POINTER (IN C/C++) What Is a Pointer?
POINTER (IN C/C++) What is a pointer? Variable in a program is something with a name, the value of which can vary. The way the compiler and linker handles this is that it assigns a specific block of memory within the computer to hold the value of that variable. • The left side is the value in memory. • The right side is the address of that memory Dereferencing: • int bar = *foo_ptr; • *foo_ptr = 42; // set foo to 42 which is also effect bar = 42 • To dereference ted, go to memory address of 1776, the value contain in that is 25 which is what we need. Differences between & and * & is the reference operator and can be read as "address of“ * is the dereference operator and can be read as "value pointed by" A variable referenced with & can be dereferenced with *. • Andy = 25; • Ted = &andy; All expressions below are true: • andy == 25 // true • &andy == 1776 // true • ted == 1776 // true • *ted == 25 // true How to declare pointer? • Type + “*” + name of variable. • Example: int * number; • char * c; • • number or c is a variable is called a pointer variable How to use pointer? • int foo; • int *foo_ptr = &foo; • foo_ptr is declared as a pointer to int. We have initialized it to point to foo. • foo occupies some memory. Its location in memory is called its address. &foo is the address of foo Assignment and pointer: • int *foo_pr = 5; // wrong • int foo = 5; • int *foo_pr = &foo; // correct way Change the pointer to the next memory block: • int foo = 5; • int *foo_pr = &foo; • foo_pr ++; Pointer arithmetics • char *mychar; // sizeof 1 byte • short *myshort; // sizeof 2 bytes • long *mylong; // sizeof 4 byts • mychar++; // increase by 1 byte • myshort++; // increase by 2 bytes • mylong++; // increase by 4 bytes Increase pointer is different from increase the dereference • *P++; // unary operation: go to the address of the pointer then increase its address and return a value • (*P)++; // get the value from the address of p then increase the value by 1 Arrays: • int array[] = {45,46,47}; • we can call the first element in the array by saying: *array or array[0]. -

Subtyping Recursive Types
ACM Transactions on Programming Languages and Systems, 15(4), pp. 575-631, 1993. Subtyping Recursive Types Roberto M. Amadio1 Luca Cardelli CNRS-CRIN, Nancy DEC, Systems Research Center Abstract We investigate the interactions of subtyping and recursive types, in a simply typed λ-calculus. The two fundamental questions here are whether two (recursive) types are in the subtype relation, and whether a term has a type. To address the first question, we relate various definitions of type equivalence and subtyping that are induced by a model, an ordering on infinite trees, an algorithm, and a set of type rules. We show soundness and completeness between the rules, the algorithm, and the tree semantics. We also prove soundness and a restricted form of completeness for the model. To address the second question, we show that to every pair of types in the subtype relation we can associate a term whose denotation is the uniquely determined coercion map between the two types. Moreover, we derive an algorithm that, when given a term with implicit coercions, can infer its least type whenever possible. 1This author's work has been supported in part by Digital Equipment Corporation and in part by the Stanford-CNR Collaboration Project. Page 1 Contents 1. Introduction 1.1 Types 1.2 Subtypes 1.3 Equality of Recursive Types 1.4 Subtyping of Recursive Types 1.5 Algorithm outline 1.6 Formal development 2. A Simply Typed λ-calculus with Recursive Types 2.1 Types 2.2 Terms 2.3 Equations 3. Tree Ordering 3.1 Subtyping Non-recursive Types 3.2 Folding and Unfolding 3.3 Tree Expansion 3.4 Finite Approximations 4. -

Rome Statute of the International Criminal Court
Rome Statute of the International Criminal Court The text of the Rome Statute reproduced herein was originally circulated as document A/CONF.183/9 of 17 July 1998 and corrected by procès-verbaux of 10 November 1998, 12 July 1999, 30 November 1999, 8 May 2000, 17 January 2001 and 16 January 2002. The amendments to article 8 reproduce the text contained in depositary notification C.N.651.2010 Treaties-6, while the amendments regarding articles 8 bis, 15 bis and 15 ter replicate the text contained in depositary notification C.N.651.2010 Treaties-8; both depositary communications are dated 29 November 2010. The table of contents is not part of the text of the Rome Statute adopted by the United Nations Diplomatic Conference of Plenipotentiaries on the Establishment of an International Criminal Court on 17 July 1998. It has been included in this publication for ease of reference. Done at Rome on 17 July 1998, in force on 1 July 2002, United Nations, Treaty Series, vol. 2187, No. 38544, Depositary: Secretary-General of the United Nations, http://treaties.un.org. Rome Statute of the International Criminal Court Published by the International Criminal Court ISBN No. 92-9227-232-2 ICC-PIOS-LT-03-002/15_Eng Copyright © International Criminal Court 2011 All rights reserved International Criminal Court | Po Box 19519 | 2500 CM | The Hague | The Netherlands | www.icc-cpi.int Rome Statute of the International Criminal Court Table of Contents PREAMBLE 1 PART 1. ESTABLISHMENT OF THE COURT 2 Article 1 The Court 2 Article 2 Relationship of the Court with the United Nations 2 Article 3 Seat of the Court 2 Article 4 Legal status and powers of the Court 2 PART 2. -
Language Translators
Student Notes Theory LANGUAGE TRANSLATORS A. HIGH AND LOW LEVEL LANGUAGES Programming languages Low – Level Languages High-Level Languages Example: Assembly Language Example: Pascal, Basic, Java Characteristics of LOW Level Languages: They are machine oriented : an assembly language program written for one machine will not work on any other type of machine unless they happen to use the same processor chip. Each assembly language statement generally translates into one machine code instruction, therefore the program becomes long and time-consuming to create. Example: 10100101 01110001 LDA &71 01101001 00000001 ADD #&01 10000101 01110001 STA &71 Characteristics of HIGH Level Languages: They are not machine oriented: in theory they are portable , meaning that a program written for one machine will run on any other machine for which the appropriate compiler or interpreter is available. They are problem oriented: most high level languages have structures and facilities appropriate to a particular use or type of problem. For example, FORTRAN was developed for use in solving mathematical problems. Some languages, such as PASCAL were developed as general-purpose languages. Statements in high-level languages usually resemble English sentences or mathematical expressions and these languages tend to be easier to learn and understand than assembly language. Each statement in a high level language will be translated into several machine code instructions. Example: number:= number + 1; 10100101 01110001 01101001 00000001 10000101 01110001 B. GENERATIONS OF PROGRAMMING LANGUAGES 4th generation 4GLs 3rd generation High Level Languages 2nd generation Low-level Languages 1st generation Machine Code Page 1 of 5 K Aquilina Student Notes Theory 1. MACHINE LANGUAGE – 1ST GENERATION In the early days of computer programming all programs had to be written in machine code. -

Exposing Native Device Apis to Web Apps
Exposing Native Device APIs to Web Apps Arno Puder Nikolai Tillmann Michał Moskal San Francisco State University Microsoft Research Microsoft Research Computer Science One Microsoft Way One Microsoft Way Department Redmond, WA 98052 Redmond, WA 98052 1600 Holloway Avenue [email protected] [email protected] San Francisco, CA 94132 [email protected] ABSTRACT language of the respective platform, HTML5 technologies A recent survey among developers revealed that half plan to gain traction for the development of mobile apps [12, 4]. use HTML5 for mobile apps in the future. An earlier survey A recent survey among developers revealed that more than showed that access to native device APIs is the biggest short- half (52%) are using HTML5 technologies for developing mo- coming of HTML5 compared to native apps. Several dif- bile apps [22]. HTML5 technologies enable the reuse of the ferent approaches exist to overcome this limitation, among presentation layer and high-level logic across multiple plat- them cross-compilation and packaging the HTML5 as a na- forms. However, an earlier survey [21] on cross-platform tive app. In this paper we propose a novel approach by using developer tools revealed that access to native device APIs a device-local service that runs on the smartphone and that is the biggest shortcoming of HTML5 compared to native acts as a gateway to the native layer for HTML5-based apps apps. Several different approaches exist to overcome this running inside the standard browser. WebSockets are used limitation. Besides the development of native apps for spe- for bi-directional communication between the web apps and cific platforms, popular approaches include cross-platform the device-local service. -

1958 9Th Special Session Journal of The
THE JOURNAL OF THE ASSEMBLY CH' THE SPECIAL SESSION LEGISLATURE OF THE STATE OF NEVADA 1958 BEGUN ON MONDAY, THE THIRTIETH DAY OF JUNE, AND ENDED ON TUESDAY, THE FIRST DAY OF JULY CARSON C ITY. NEVADA STATE PRINTING OFFICE - - JACK MCCARTHY, STATE PRINTER 1958 ARRANGEMENT AND CONTENTS OF VOLUME l'AGE Ll£GISLAT1VE CALl£NlJAl-L ..................................-..................................... ........ V INDEX TO ASSEMBLY BILLS...................................... ............... ..................... VI I:-.rDEX TO ASSEMBLY RESOLUTIONS AND MEMORIALS ......_. .. ........ VII I :'>/UI<;X TO SENA'l'E BILLS................................................................................. VII l'F.R80 'KEL OF THl£ K:l£VADA ASSEMBLY ............................................... VIII .\.SSE:\lBLY PROCEEDINGS.................................................................................. 1 NOTE: Due to the brevit y of the 1958 Special Session t here is no Genera l Index to the proceedings in this volume. ASSEMBLY LEGISLATIVE CALENDAR Lef}iS IC&t-ive day Date Page number l ...................................... June 30, 1958.... ............................................ l 2 ...................................... Jnly 1, 1958..... ............................................. 11 INDEX TO ASSEMBLY BILLS No. 1'i.tle, Jnti·ucZ.we1· and Page 1.... An Act directing the employment security departme nt of the State of Nevada to enter into an agreement with the Secretary of Labor to provide for temporary unemployment compensation paymen ts under