Serial Ports
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
AN706: EZSP-UART Host Interfacing Guide
AN706: EZSP-UART Host Interfacing Guide This application note describes how to connect a Host processor to a Network Co-Processor (NCP) using the UART-based Em- KEY POINTS berZNet Serial Protocol (EZSP). It assumes that you already • EZSP-UART protocol overview have a basic understanding of the EZSP-UART Gateway proto- • Physical interfaces col, as well as the signals needed by the UART interface. If not, • Command line options for Host refer to UG101: UART Gateway Protocol Reference Guide be- applications fore continuing. This application note has been updated to Em- • Hardware design considerations • Powering up, power cycling, and rebooting berZNet PRO 6.6 to reflect a minor update to the Silicon Labs • Bootloading Zigbee application framework, though the content of the EZSP- UART interface still applies to earlier versions of the EmberZNet PRO stack. silabs.com | Building a more connected world. Rev. 1.2 AN706: EZSP-UART Host Interfacing Guide Protocol Overview 1. Protocol Overview Silicon Labs designed EZSP as a protocol to allow communications between components running pieces of the EmberZNet PRO wire- less mesh stack, namely a Host processor and an NCP. The Host processor runs the application layer and executes on the POSIX platform such as Mac OS, Linux, or a Windows PC running Cygwin or the new Windows 10 BASH shell. You can also run this on an embedded platform like the Raspberry Pi. This lets you develop and test your application on an easy-to-use platform before porting your solution to a different Host processor with few changes. The NCP runs the EmberZNet PRO stack and physical layer (PHY). -
CS 61C: Great Ideas in Computer Architecture Dependability: Parity
CS 61C: Great Ideas in Computer Architecture Dependability: Parity, RAID, ECC Instructor: Alan Christopher 8/07/2014 Summer 2014 -- Lecture #27 1 Review of Last Lecture • MapReduce Data Level Parallelism – Framework to divide up data to be processed in parallel – Handles worker failure and laggard jobs automatically – Mapper outputs intermediate (key, value) pairs – Optional Combiner in-between for better load balancing – Reducer “combines” intermediate values with same key 8/07/2014 Summer 2014 -- Lecture #27 2 Agenda • Dependability • Administrivia • RAID • Error Correcting Codes 8/07/2014 Summer 2014 -- Lecture #27 3 Six Great Ideas in Computer Architecture 1. Layers of Representation/Interpretation 2. Technology Trends 3. Principle of Locality/Memory Hierarchy 4. Parallelism 5. Performance Measurement & Improvement 6. Dependability via Redundancy 8/07/2014 Summer 2014 -- Lecture #27 4 Great Idea #6: Dependability via Redundancy • Redundancy so that a failing piece doesn’t make the whole system fail 2 of 3 agree 1+1=2 1+1=2 1+1=2 1+1=1 FAIL! 8/07/2014 Summer 2014 -- Lecture #27 5 Great Idea #6: Dependability via Redundancy • Applies to everything from datacenters to memory – Redundant datacenters so that can lose 1 datacenter but Internet service stays online – Redundant routes so can lose nodes but Internet doesn’t fail – Redundant disks so that can lose 1 disk but not lose data (Redundant Arrays of Independent Disks/RAID) – Redundant memory bits of so that can lose 1 bit but no data (Error Correcting Code/ECC Memory) 8/07/2014 Summer -
I-Modem Command Reference
U.S. Robotics I-modem Command Reference U.S. Robotics I-modem Command Reference page i U.S. Robotics I-modem Command Reference The material contained in this manual is for information purposes only and is subject to change without notice. No part of this document may be reproduced, transmitted, transcribed, or stored in a retrieval system in any form or by any means, mechanical, magnetic, electronic, optical, chemical, or otherwise without the written permission of U.S. Robotics. U.S. Robotics and the U.S. Robotics logo are registered trademarks of U.S. Robotics. Courier, V.Everything, and I-modem are tradmarks of U.S. Robotics. Microsoft and Win- dows NT are registered trademarks of Microsoft Corporation. V.Fast Class and V.FC are trademarks of Rockwell International. MNP is a registered trademark of Microcom Sys- tems, Inc. Any trademarks, trade names, service marks, or service names owned or registered by any other company and used in this manual are the property of their respective companies. U.S. Robotics assumes no responsibility for errors or omissions in this manual. Nor does U.S. Robotics make any commitment to update the information contained herein. ©1997 U.S. Robotics Corp. 8100 N. McCormick Blvd. Skokie, IL 60076-2999 USA page ii U.S. Robotics I-modem Command Reference Table of Contents Chapter 1 Using the AT Command Set 1-1 General Rules for Using AT Commands 1-1 Basic AT Commands 1-2 S-registers 1-3 Chapter 2 Modes of Operation 2-1 Command and Online Modes 2-1 Controlling Local Echo 2-3 Data and Fax Modes 2-5 Chapter 3 Dialing, Answering, and Hanging Up 3-1 Making International Calls 3-7 Call Detection 3-9 page iii U.S. -
RS-232 Full Modem Interface (8-Wire) Module for Protection Relay, IED, and Substation Automation Reference Design
TI Designs RS-232 Full Modem Interface (8-Wire) Module for Protection Relay, IED, and Substation Automation Reference Design TI Designs Design Features The worldwide electric-power infrastructure is a set of • Can be Configured as DTE or DCE Interface interconnected assets for power generation, • Galvanic Isolation Using Digital Isolators With transmission, conversion, and distribution commonly Modular Options of 2-, 4-, or 8-Wire Interface referred to as "the grid". Protection relays and IEDs (DTE) used in the grid measures a number of electrical • Operates With Single 5.6-V Input parameters. These parameters are collected by • 9-Pin D-Sub Connectors Provided for Easy automation systems for analysis. Data from the IEDs Interface to External DTE or DCE can be collected locally or remotely. For remote • Isolated Power Supply Generated Using SN6501 communication, modems (DCE) are used, which can Transformer Driver be dial-up, GSM, or radio modems. Modems are interfaced to IEDs using an RS-232 interface. The RS- • Tested for the Following Data Rates: 1200, 2400, 232 interface includes data, control, and status 4800, 9600, 19200, and 115000 bps signals. Control and status signals can be hardware or • Tested for ESD ±8-kV Contact Discharge software based. To maintain the data integrity in a • Tested for Surge ±1-kV Common Mode noisy grid environment, galvanic isolation is provided between IEDs and modems. This TI design Featured Applications demonstrates the hardware flow control method for DTE or DCE. This TI design also demonstrates • DTE -

MT5634HD8/16 User Guide MT5634HD8/16 User Guide P/N 82074700, Revision a Copyright © 1997 by Multi-Tech Systems, Inc
MT5634HD8/16 User Guide MT5634HD8/16 User Guide P/N 82074700, Revision A Copyright © 1997 by Multi-Tech Systems, Inc. All rights reserved. This publication may not be reproduced, in whole or in part, without prior expressed written permission from Multi-Tech Systems, Inc. Multi-Tech Systems, Inc. makes no representation or warranties with respect to the contents hereof and specifically disclaims any implied warranties of merchantability or fitness for any particular purpose. Furthermore, Multi-Tech Systems, Inc. reserves the right to revise this publication and to make changes from time to time in the content hereof without obligation of Multi-Tech Systems, Inc., to notify any person or organization of such revisions or changes. Revision Date Description A 11/15/97 Manual released. Multi-Tech, CommPlete, RASExpress, MultiExpress, MultiExpress Fax MultiModem, MultiModemZDX, MultiCommManager, and the Multi-Tech logo are trademarks of Multi-Tech Systems, Inc. Other trademarks and trade names mentioned in this publication belong to their respective owners. Multi-Tech Systems, Inc. 2205 Woodale Drive Mounds View, Minnesota 55112 (612) 785-3500 or (800) 328-9717 U.S. Fax (612) 785-9874 Technical Support (800) 972-2439 BBS (612) 785-3702 or (800) 392-2432 Fax Back (612) 717-5888 Internet Address: http://www.multitech.com Federal Communications Commission Statement This equipment has been tested and found to comply with the limits for a Class A digital device, pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference when the equipment is operated in a commercial environment. This equipment generates, uses, and can radiate radio frequency energy, and if not installed and used in accordance with the instruction manual, may cause harmful interference to radio communications. -
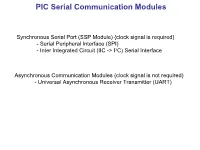
PIC Serial Communication Modules
PIC Serial Communication Modules Synchronous Serial Port (SSP Module) {clock signal is required} - Serial Peripheral Interface (SPI) - Inter Integrated Circuit (IIC -> I2C) Serial Interface Asynchronous Communication Modules (clock signal is not required) - Universal Asynchronous Receiver Transmitter (UART) UART • A Universal Asynchronous Receiver-Transmitter (UART) is used for serial communications – usually via a cable. • The UART generates signals with the same timing as the RS-232 standard used by the Personal Computer’s COM ports. • The UART input/output uses 0V for logic 0 and 5V for logic 1. • The RS-232 standard (and the COM port) use +12V for logic 0 and –12V for logic 1. • To convert between these voltages levels we need an additional integrated circuit (such as Maxim’s MAX232). Parts of an RS-232 Frame • A frame transmits a single character and is in general composed of: 1) A start bit (always logic 0) 2) Data bits (5, 6, 7, or 8 of them) 3) A parity bit (optional, even or odd parity) 4) A stop bit (always logic 1) RS232 Level Converter PIC & MAX232 Connection UART Timing Accuracy • Since the transmitter and receiver keep track of time independently between clock recovery synchronization points, the combined inaccuracy of the transmitter and receiver’s clocks can not be too large. • For RS-232 communication, this combined inaccuracy is about 5%. • Usually, an RC oscillator is too inaccurate and a crystal is required. UART Bit Time and Baud Rate • The bit time (units of time) is the time from the start of one serial data bit value to the start of another. -

Series II Modem 336 Series II Modem 336+
AUGUST 2000 MD1640A MD1641A Series II Modem 336 Series II Modem 336+ CUSTOMER Order toll-free in the U.S.: Call 7877-877-BBOX (outside the U.S. call 724-746-5500) SUPPORT FREE technical support 24 hours a day, 7 days a week: Call 724-746-5500 or fax 724-746-0746 INFORMATION Mailing address: Black Box Corporation, 1000 Park Drive, Lawrence, PA 15055-1018 Web site: www.blackbox.com • Email: [email protected] Series II Modems 336 and 336+ Series II Intelligent Data/Fax Modems Model 336 (Product Code MD1641A) Model 336+ (Product Code MD1640A) User Guide SERIES II INTELLIGENT DATA/FAX MODEMS DISCLAIMER This publication may not be reproduced, in whole or in part, without prior expressed written permission from the manufacturer. The manufacturer makes no representations or warranties with respect to the contents hereof and specifically disclaims any implied warranties of merchantability or fitness for any particular purpose. The manufacturer reserves the right to revise this publication and to make changes from time to time in the content hereof without obligation of the manufacturer to notify any person or organization of such revisions or changes. TRADEMARKS USED IN THIS MANUAL MNP and Microcom Network Protocol are trademarks of Microcom Inc. AS/400 and System3x are registered trademarks of IBM. Appletalk, Mac, and Macintosh are registered trademarks of Apple Computer Inc. Unix is a registered trademark of X/Open Co. Ltd. Microsoft and Windows are registered trademarks of Microsoft Corporation. All other trademarks mentioned in this manual -

What the Heck Is RS-232 Anyway…
Tech Note What the heck is RS-232 anyway… It just occurred to me that there is an entire generation of technicians in the work force that did not grow up in the days of the TRS-80 and Commodore 64 PC. Rather, they were brought up on broadband and Wi-Fi. To them that funny looking 9-Pin connector that we old folks cut our teeth on is a mystery full of uncertainty and doubt – with a little bit of fear mixed in for good measure. In this paper, I hope to dispel some of the mystery and give you the essentials of RS-232. What is it? At one time, RS-232 / EIA-232 was the most widely used communication standard on the planet. It was defined and redefined many times. The “EIA” stands for “Electronic Industries Association” and the “RS” stands for “Recommended Standard.” That being the case, it was always rather loose. The physical characteristics of the hardware include both a 25 pin and 9 pin D sub connector. RS- 232 is capable of operating at data rates up to 20 Kbps and can push data about 50 ft. The absolute maximum data rate is difficult to nail down due the differences in the transmission line and cable length. It is possible to operate at some pretty high data rates if the distance is short. The voltage levels are defined as a range from -12 to +12 volts. RS-232 is also single ended. This means that a single electrical signal is compared to a common signal (ground) to determine binary logic states. -
Design and Its Application of Microprocessor
Design and Its application of Microprocessor The 8088 And 8086 Microprocessors: Programming, Interfacing, Software, Hardware And Applications Suk-Ju Kang Dong-A University [email protected] 1 Chapter 9. Memory Devices, Circuits, and Subsystem Design 2 In This Chapter, … 9.1 Program and Data Storage 9.2 Read-Only Memory 9.3 Random Access Read/Write Memories 9.4 Parity, the Parity Bit, and Parity- Checker/Generator Circuit 9.5 FLASH Memory 9.6 Wait-State Circuitry 9.7 8088/8086 Microcomputer System Memory Circuitry 3 Program and Data Storage The memory unit of a microcomputer is partitioned into a primary storage section and secondary storage section 4 Program and Data Storage The basic input/output system (BIOS) are programs held in ROM. ◦ They are called firmware because of their permanent nature ◦ The typical size of a BIOS ROM used in a PC today is 256 Kbytes Programs are normally read in from the secondary memory storage device, stored in the program storage part of memory, and then run 5 Read-Only Memory ROM, PROM, and EPROM ◦ Mask-programmable read-only memory (ROM) ◦ One-time-programmable read-only memory (PROM) ◦ Erasable read-only memory (EPROM) 6 Read-Only Memory Block diagram of a read-only memory Address bus ◦ Data bus ◦ Control bus Chip enable (CE) Output enable (OE) 7 Read-Only Memory Read operation 8 Random Access Read/Write Memories The memory section of a microcomputer system is normally formed from both read-only memories and random access read/write memories (RAM) RAM is different from ROM in two ways: ◦ Data stored in RAM is not permanent in nature RAM is normally used to store temporary data and application programs for execution ◦ RAM is volatile If power is removed from RAM, the stored data are lost 9 Random Access Read/Write Memories Static and dynamic RAMs ◦ For a static RAM (SRAM), data remain valid as long as the power supply is not turned off. -

D: Serial Driver
CHAPTER 7 Serial Driver 7 This chapter describes how you can use the Serial Driver to transfer data to a device connected to a Macintosh modem or printer port. The Serial Driver supports 7 asynchronous serial data communication between applications and serial devices Serial Driver through these ports. The Serial Driver provides low-level support for communicating with serial devices that cannot be accessed through the Communications Toolbox or Printing Manager. For example, a scientific instrument or a printer that does not support QuickDraw. Before you decide to use the Serial Driver, you should determine whether it is the appropriate solution for your communication needs. The Communications Toolbox is the recommended method for integrating modems and other telecommunications devices into the Macintosh environment. The Communications Toolbox provides hardware-independent services and a standard interface that offers compatibility with all Macintosh models. To find out more about the Communications Toolbox, see Inside the Macintosh Communications Toolbox. Likewise, the Printing Manager is the recommended interface for printers and similar output devices. Using the Printing Manager makes your hardware or software product compatible with every other device or application that supports this standard interface. Refer to Inside Macintosh: Imaging With QuickDraw for more information. To use the Serial Driver, you should understand how to open, close, and communicate with device drivers using the Device Manager. You can find this information in -

Mass-Storage
Mass-Storage ICS332 - Fall 2017 Operating Systems Henri Casanova ([email protected]) Magnetic Disks ! Magnetic disks (a.k.a. “hard drives”) are (still) the most common secondary storage devices today ! They are “messy” " Errors, bad blocks, missed seeks, moving parts ! And yet, the data they hold is critical ! The OS used to hide all the “messiness” from higher-level software " Programs shouldn’t have to know anything about the way the disk is built ! This has been done increasingly with help from the hardware " i.e., the disk controller ! What do hard drives look like? Hard Drive Structure Hard Drive access Access ! A hard drive requires a lot of information for an access " Platter #, sector #, track #, etc. ! Hard drives today are more complicated than the simple picture " e.g., sectors of different sizes to deal with varying densities and radial speeds with respect to the distance to the spindle ! Nowadays, hard drives comply with standard interfaces " EIDE, ATA, SATA, USB, Fiber Channel, SCSI ! The hard drives, in these interfaces, is seen as an array of logical blocks (512 bytes) ! The device, in hardware, does the translation between the block # and the platter #, sector #, track #, etc. ! This is good: " The kernel code to access the disk is straightforward " The controller can do a lot of work, e.g., transparently hiding bad blocks ! The cost is that some cool optimizations that the kernel could perhaps do are not possible, since all its hidden from it Hard Drive Performance ! We’ve said many times that hard drives are slow ! -

Serial-HOWTO.Pdf
Serial HOWTO Serial HOWTO Table of Contents Serial HOWTO...................................................................................................................................................1 David S.Lawyer [email protected] original by Greg Hankins.....................................................................1 1. Introduction..........................................................................................................................................1 2. Quick Help...........................................................................................................................................1 3. How the Hardware Transfers Bytes.....................................................................................................1 4. Serial Port Basics.................................................................................................................................1 5. Multiport Serial Boards/Cards/Adapters..............................................................................................2 6. Servers for Serial Ports........................................................................................................................2 7. Configuring Overview.........................................................................................................................2 8. Locating the Serial Port: IO address, IRQs..........................................................................................2 9. Configuring the Serial Driver (high-level) "stty"................................................................................2