A New Mapping Method for the Moon with the Chang'e-1 Data
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Volcanic History of the Imbrium Basin: a Close-Up View from the Lunar Rover Yutu
Volcanic history of the Imbrium basin: A close-up view from the lunar rover Yutu Jinhai Zhanga, Wei Yanga, Sen Hua, Yangting Lina,1, Guangyou Fangb, Chunlai Lic, Wenxi Pengd, Sanyuan Zhue, Zhiping Hef, Bin Zhoub, Hongyu Ling, Jianfeng Yangh, Enhai Liui, Yuchen Xua, Jianyu Wangf, Zhenxing Yaoa, Yongliao Zouc, Jun Yanc, and Ziyuan Ouyangj aKey Laboratory of Earth and Planetary Physics, Institute of Geology and Geophysics, Chinese Academy of Sciences, Beijing 100029, China; bInstitute of Electronics, Chinese Academy of Sciences, Beijing 100190, China; cNational Astronomical Observatories, Chinese Academy of Sciences, Beijing 100012, China; dInstitute of High Energy Physics, Chinese Academy of Sciences, Beijing 100049, China; eKey Laboratory of Mineralogy and Metallogeny, Guangzhou Institute of Geochemistry, Chinese Academy of Sciences, Guangzhou 510640, China; fKey Laboratory of Space Active Opto-Electronics Technology, Shanghai Institute of Technical Physics, Chinese Academy of Sciences, Shanghai 200083, China; gThe Fifth Laboratory, Beijing Institute of Space Mechanics & Electricity, Beijing 100076, China; hXi’an Institute of Optics and Precision Mechanics, Chinese Academy of Sciences, Xi’an 710119, China; iInstitute of Optics and Electronics, Chinese Academy of Sciences, Chengdu 610209, China; and jInstitute of Geochemistry, Chinese Academy of Science, Guiyang 550002, China Edited by Mark H. Thiemens, University of California, San Diego, La Jolla, CA, and approved March 24, 2015 (received for review February 13, 2015) We report the surface exploration by the lunar rover Yutu that flows in Mare Imbrium was obtained only by remote sensing from landed on the young lava flow in the northeastern part of the orbit. On December 14, 2013, Chang’e-3 successfully landed on the Mare Imbrium, which is the largest basin on the nearside of the young and high-Ti lava flow in the northeastern Mare Imbrium, Moon and is filled with several basalt units estimated to date from about 10 km south from the old low-Ti basalt unit (Fig. -

A Summary of the Unified Lunar Control Network 2005 and Lunar Topographic Model B. A. Archinal, M. R. Rosiek, R. L. Kirk, and B
A Summary of the Unified Lunar Control Network 2005 and Lunar Topographic Model B. A. Archinal, M. R. Rosiek, R. L. Kirk, and B. L. Redding U. S. Geological Survey, 2255 N. Gemini Drive, Flagstaff, AZ 86001, USA, [email protected] Introduction: We have completed a new general unified lunar control network and lunar topographic model based on Clementine images. This photogrammetric network solution is the largest planetary control network ever completed. It includes the determination of the 3-D positions of 272,931 points on the lunar surface and the correction of the camera angles for 43,866 Clementine images, using 546,126 tie point measurements. The solution RMS is 20 µm (= 0.9 pixels) in the image plane, with the largest residual of 6.4 pixels. We are now documenting our solution [1] and plan to release the solution results soon [2]. Previous Networks: In recent years there have been two generally accepted lunar control networks. These are the Unified Lunar Control Network (ULCN) and the Clementine Lunar Control Network (CLCN), both derived by M. Davies and T. Colvin at RAND. The original ULCN was described in the last major publication about a lunar control network [3]. Images for this network are from the Apollo, Mariner 10, and Galileo missions, and Earth-based photographs. The CLCN was derived from Clementine images and measurements on Clementine 750-nm images. The purpose of this network was to determine the geometry for the Clementine Base Map [4]. The geometry of that mosaic was used to produce the Clementine UVVIS digital image model [5] and the Near-Infrared Global Multispectral Map of the Moon from Clementine [6]. -

Modeling and Adjustment of THEMIS IR Line Scanner Camera Image Measurements
Modeling and Adjustment of THEMIS IR Line Scanner Camera Image Measurements by Brent Archinal USGS Astrogeology Team 2255 N. Gemini Drive Flagstaff, AZ 86001 [email protected] As of 2004 December 9 Version 1.0 Table of Contents 1. Introduction 1.1. General 1.2. Conventions 2. Observations Equations and Their Partials 2.1. Line Scanner Camera Specific Modeling 2.2. Partials for New Parameters 2.2.1. Orientation Partials 2.2.2. Spatial Partials 2.2.3. Partials of the observations with respect to the parameters 2.2.4. Parameter Weighting 3. Adjustment Model 4. Implementation 4.1. Input/Output Changes 4.1.1. Image Measurements 4.1.2. SPICE Data 4.1.3. Program Control (Parameters) Information 4.2. Computational Changes 4.2.1. Generation of A priori Information 4.2.2. Partial derivatives 4.2.3. Solution Output 5. Testing and Near Term Work 6. Future Work Acknowledgements References Useful web sites Appendix I - Partial Transcription of Colvin (1992) Documentation Appendix II - HiRISE Sensor Model Information 1. Introduction 1.1 General The overall problem we’re solving is that we want to be able to set up the relationships between the coordinates of arbitrary physical points in space (e.g. ground points) and their coordinates on line scanner (or “pushbroom”) camera images. We then want to do a least squares solution in order to come up with consistent camera orientation and position information that represents these relationships accurately. For now, supported by funding from the NASA Critical Data Products initiative (for 2003 September to 2005 August), we will concentrate on handling the THEMIS IR camera system (Christensen et al., 2003). -
Mini-RF: Imaging Radars for Exploring the Lunar Poles
Mini-RF: Imaging Radars for Exploring the Lunar Poles Ben Bussey, Paul Spudis, Keith Raney, Helene Winters JHU/APL Stu Nozette, Chris Lichtenberg, Bill Marinelli NAWC 1 Mini-RF Organization, Science and Resource Evaluation Objectives • Mini-RF is a suite of radar instruments funded by NASA (SOMD & ESMD) and DoD. • Search for areas near the lunar poles that have the anomalous radar reflectivity signatures (high radar albedo and Circular Polarization Ratios) that differentiate volumetric water-ice deposits from more typical lunar surfaces • Map the morphology of permanently dark regions near the poles 2 Search for Ice • The case for water-ice can be resolved only if robust and repeatable data of the lunar polar regions support that conclusion. This rigorous standard can be met only by a dedicated polar-orbiting radar. • Mini-RF will use a unique hybrid polarity architecture to look for ice deposits • Transmit circular polarization (e.g. right-circular polarization RCP) • Receive coherent orthogonal polarizations • Derive Stokes parameters of the received signal • Use Stokes parameters to reconstruct and investigate the nature of the backscatter field. Distinguish between surface (roughness) and volume (ice) scattering 3 Top-level Radar Overview Parameter Chandrayaan-1 LRO • Frequency S-band S-band and X-band • Polarization Tx RCP Rx H & V • Scatterometry S-band (none) • Imager Regional maps Site-specific selections • Resolution (m/pixel) 75 75, 7.5 azimuth x 15 range • Looks 16 16 or 8 • Swath (km) 8 6 or 4 • Altitude (km) 100 50 • Incidence -

Space Sector Brochure
SPACE SPACE REVOLUTIONIZING THE WAY TO SPACE SPACECRAFT TECHNOLOGIES PROPULSION Moog provides components and subsystems for cold gas, chemical, and electric Moog is a proven leader in components, subsystems, and systems propulsion and designs, develops, and manufactures complete chemical propulsion for spacecraft of all sizes, from smallsats to GEO spacecraft. systems, including tanks, to accelerate the spacecraft for orbit-insertion, station Moog has been successfully providing spacecraft controls, in- keeping, or attitude control. Moog makes thrusters from <1N to 500N to support the space propulsion, and major subsystems for science, military, propulsion requirements for small to large spacecraft. and commercial operations for more than 60 years. AVIONICS Moog is a proven provider of high performance and reliable space-rated avionics hardware and software for command and data handling, power distribution, payload processing, memory, GPS receivers, motor controllers, and onboard computing. POWER SYSTEMS Moog leverages its proven spacecraft avionics and high-power control systems to supply hardware for telemetry, as well as solar array and battery power management and switching. Applications include bus line power to valves, motors, torque rods, and other end effectors. Moog has developed products for Power Management and Distribution (PMAD) Systems, such as high power DC converters, switching, and power stabilization. MECHANISMS Moog has produced spacecraft motion control products for more than 50 years, dating back to the historic Apollo and Pioneer programs. Today, we offer rotary, linear, and specialized mechanisms for spacecraft motion control needs. Moog is a world-class manufacturer of solar array drives, propulsion positioning gimbals, electric propulsion gimbals, antenna positioner mechanisms, docking and release mechanisms, and specialty payload positioners. -

LUNAR REGOLITH PROPERTIES CONSTRAINED by LRO DIVINER and CHANG'e 2 MICROWAVE RADIOMETER DATA. J. Feng1, M. A. Siegler1, P. O
50th Lunar and Planetary Science Conference 2019 (LPI Contrib. No. 2132) 3176.pdf LUNAR REGOLITH PROPERTIES CONSTRAINED BY LRO DIVINER AND CHANG’E 2 MICROWAVE RADIOMETER DATA. J. Feng1, M. A. Siegler1, P. O. Hayne2, D. T. Blewett3, 1Planetary Sci- ence Institute (1700 East Fort Lowell, Suite 106 Tucson, AZ 85719-2395, [email protected]), 2University of Colorado, Boulder. 3Johns Hopkins Univ. Applied Physics Lab, Maryland. Introduction: The geophysical properties of the sults of the thermal model (which includes layer num- lunar regolith have been well-studied, but many uncer- bers, layer thickness, temperature profile and density tainties remain about their in-situ nature. Diviner Lunar profile) are input parameters for the microwave model. Radiometer Experiment onboard LRO [1] is an instru- In contrast to [2, 3], we update the thermal parame- ment measuring the surface bolometric temperature of ters to match the surface temperature at noon in the the regolith. It has been systematically mapping the equatorial region and diurnal temperature variation in Moon since July 5, 2009 at solar and infrared wave- high latitude (Fig. 1). The best fit of the data show that lengths covering a full range of latitudes, longitudes, for most highlands the regolith has a bond albedo of local times and seasons. The Microwave Radiometer 0.09 at normal solar incidence and bond albedo at arbi- (MRM) carried by Chang’e 2 (CE-2) was used to de- trary solar incidence θ is represented by A=0.09 rive the brightness temperature of the moon in frequen- +0.04×(4θ/π)3+0.05×(2θ/π)8. -

Lunar Sourcebook : a User's Guide to the Moon
4 LUNAR SURFACE PROCESSES Friedrich Hörz, Richard Grieve, Grant Heiken, Paul Spudis, and Alan Binder The Moon’s surface is not affected by atmosphere, encounters with each other and with larger planets water, or life, the three major agents for altering throughout the lifetime of the solar system. These terrestrial surfaces. In addition, the lunar surface has orbital alterations are generally minor, but they not been shaped by recent geological activity, because ensure that, over geological periods, collisions with the lunar crust and mantle have been relatively cold other bodies will occur. and rigid throughout most of geological time. When such a collision happens, two outcomes are Convective internal mass transport, which dominates possible. If “target” and “projectile” are of comparable the dynamic Earth, is therefore largely absent on the size, collisional fragmentation and annihilation Moon, and so are the geological effects of such occurs, producing a large number of much smaller internal motions—volcanism, uplift, faulting, and fragments. If the target object is very large compared subduction—that both create and destroy surfaces on to the projectile, it behaves as an “infinite halfspace,” Earth. The great contrast between the ancient, stable and the result is an impact crater in the target body. Moon and the active, dynamic Earth is most clearly For collisions in the asteroid belt, many of the shown by the ages of their surfaces. Nearly 80% of the resulting collisional fragments or crater ejecta escape entire solid surface of Earth is <200 m.y. old. In the gravitational field of the impacted object; many of contrast, >99% of the lunar surface formed more than these fragments are then further perturbed into 3 b.y. -
Surveyor 1 Space- Craft on June 2, 1966 As Seen by the Narrow Angle Camera of the Lunar Re- Connaissance Orbiter Taken on July 17, 2009 (Also See Fig
i “Project Surveyor, in particular, removed any doubt that it was possible for Americans to land on the Moon and explore its surface.” — Harrison H. Schmitt, Apollo 17 Scientist-Astronaut ii Frontispiece: Landing site of the Surveyor 1 space- craft on June 2, 1966 as seen by the narrow angle camera of the Lunar Re- connaissance Orbiter taken on July 17, 2009 (also see Fig. 13). The white square in the upper photo outlines the area of the enlarged view below. The spacecraft is ca. 3.3 m tall and is casting a 15 m shadow to the East. (NASA/LROC/ ASU/GSFC photos) iii iv Surveyor I: America’s First Moon Landing by William F. Mellberg v © 2014, 2015 William F. Mellberg vi About the author: William Mellberg was a marketing and public relations representative with Fokker Aircraft. He is also an aerospace historian, having published many articles on both the development of airplanes and space vehicles in various magazines. He is the author of Famous Airliners and Moon Missions. He also serves as co-Editor of Harrison H. Schmitt’s website: http://americasuncommonsense.com Acknowledgments: The support and recollections of Frank Mellberg, Harrison Schmitt, Justin Rennilson, Alexander Gurshstein, Paul Spudis, Ronald Wells, Colin Mackellar and Dwight Steven- Boniecki is gratefully acknowledged. vii Surveyor I: America’s First Moon Landing by William F. Mellberg A Journey of 250,000 Miles . December 14, 2013. China’s Chang’e 3 spacecraft successfully touched down on the Moon at 1311 GMT (2111 Beijing Time). The landing site was in Mare Imbrium, the Sea of Rains, about 25 miles (40 km) south of the small crater, Laplace F, and roughly 100 miles (160 km) east of its original target in Sinus Iridum, the Bay of Rainbows. -

Expert Perspectives on Nasa's Human Exploration
CHARTING A COURSE: EXPERT PERSPECTIVES ON NASA’S HUMAN EXPLORATION PROPOSALS HEARING BEFORE THE SUBCOMMITTEE ON SPACE COMMITTEE ON SCIENCE, SPACE, AND TECHNOLOGY HOUSE OF REPRESENTATIVES ONE HUNDRED FOURTEENTH CONGRESS FIRST SESSION February 3, 2016 Serial No. 114–58 Printed for the use of the Committee on Science, Space, and Technology ( Available via the World Wide Web: http://science.house.gov U.S. GOVERNMENT PUBLISHING OFFICE 20–828PDF WASHINGTON : 2017 For sale by the Superintendent of Documents, U.S. Government Publishing Office Internet: bookstore.gpo.gov Phone: toll free (866) 512–1800; DC area (202) 512–1800 Fax: (202) 512–2104 Mail: Stop IDCC, Washington, DC 20402–0001 COMMITTEE ON SCIENCE, SPACE, AND TECHNOLOGY HON. LAMAR S. SMITH, Texas, Chair FRANK D. LUCAS, Oklahoma EDDIE BERNICE JOHNSON, Texas F. JAMES SENSENBRENNER, JR., ZOE LOFGREN, California Wisconsin DANIEL LIPINSKI, Illinois DANA ROHRABACHER, California DONNA F. EDWARDS, Maryland RANDY NEUGEBAUER, Texas SUZANNE BONAMICI, Oregon MICHAEL T. MCCAUL, Texas ERIC SWALWELL, California MO BROOKS, Alabama ALAN GRAYSON, Florida RANDY HULTGREN, Illinois AMI BERA, California BILL POSEY, Florida ELIZABETH H. ESTY, Connecticut THOMAS MASSIE, Kentucky MARC A. VEASEY, Texas JIM BRIDENSTINE, Oklahoma KATHERINE M. CLARK, Massachusetts RANDY K. WEBER, Texas DONALD S. BEYER, JR., Virginia BILL JOHNSON, Ohio ED PERLMUTTER, Colorado JOHN R. MOOLENAAR, Michigan PAUL TONKO, New York STEPHEN KNIGHT, California MARK TAKANO, California BRIAN BABIN, Texas BILL FOSTER, Illinois BRUCE WESTERMAN, Arkansas BARBARA COMSTOCK, Virginia GARY PALMER, Alabama BARRY LOUDERMILK, Georgia RALPH LEE ABRAHAM, Louisiana DRAIN LAHOOD, Illinois SUBCOMMITTEE ON SPACE HON. BRIAN BABIN, Texas, Chair DANA ROHRABACHER, California DONNA F. EDWARDS, Maryland FRANK D. -
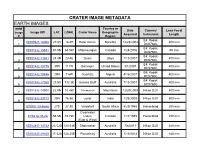
CRATER IMAGE METADATA EARTH IMAGES Country Or BMM Date Camera/ Lens Focal Image Image ID# LAT
CRATER IMAGE METADATA EARTH IMAGES Country or BMM Date Camera/ Lens Focal Image Image ID# LAT. LONG. Crater Name Geographic Acquired Instrument Length # Region E4: Kodak ISS006-E-16068 27.8S 16.4E Roter Kamm Namibia 12/28/2002 400 mm 1 DCS760C E4: Kodak ISS012-E-15881 51.5N 68.5W Manicouagan Canada 1/24/2006 50 mm 2 DCS760C E4: Kodak ISS014-E-11841 24.4N 24.4E Oasis Libya 1/13/2007 400 mm 3 DCS760C E4: Kodak ISS014-E-15775 35N 111W Barringer United States 3/1/2007 400 mm 4 DCS760C E4: Kodak ISS014-E-19496 29N 7.6W Ouarkziz Algeria 4/16/2007 800 mm 5 DCS760C E4: Kodak ISS015-E-17360 23.9S 132.3E Gosses Bluff Australia 7/13/2007 400 mm 6 DCS760C ISS018-E-14908 22.9N 10.4W Tenoumer Mauritania 12/20/2008 Nikon D2X 800 mm 7 ISS018-E-23713 20N 76.5E Lonar India 1/28/2009 Nikon D2X 800 mm 8 STS51I-33-56AA 27S 27.3E Vredefort South Africa 8/29/1985 Hasselblad 250 mm Clearwater STS61A-35-86 56.5N 74.7W Lakes Canada 11/1/1985 Hasselblad 250 mm (East & West) ISS028-E-14782 25.52S 120.53E Shoemaker Australia 7/6/2011 Nikon D2X 200 mm ISS034-E-29105 17.32S 128.25E Piccaninny Australia 1/15/2013 Nikon D2X 180 mm CRATER IMAGE METADATA MARS IMAGES BMM Geographic *Date or Camera/ Image Image ID# LAT. LONG. Crater Name Approx. YR Mission Name Region Instrument # Acquired PIA14290 5.4S 137.8E Gale Aeolis Mensae 2000's THEMIS IR Odyssey THEMIS IR Aeolis 14.5S 175.4E Gusev 2000's THEMIS IR Odyssey MOSAIC Quadrangle Mars Orbiter Colorized MOLA 42S 67E Hellas Basin Hellas Planitia 2000's Laser Altimeter Global Surveyor (MOLA) Viking Orbiter Margaritifer Visual -
LRO Instrument Suite and Measurements
The Lunar Reconnaissance Orbiter – Instrument Suite and Measurements Presented for the LRO team by Stephanie Stockman, LRO EPO lead Vision For Space Exploration Jan. 14 2004 – The President announced a new vision for space exploration that included among its goals “… to return to the moon by 2020, as the launching point for missions beyond. Beginning no later than 2008, we will send a series of robotic missions to the lunar surface to research and prepare for future human exploration.” Vision implies extended periods in space Unknown terrain, poor maps Radiation Environment Long Cold Nights and Warm Days Daytime 400 K (266 F) Nighttime 100 K (-280 F) Long Way From Home Exploitable Resources? - Water - Shelter - Energy LRO Objectives • Safe Landing Sites • Locate potential • Space – High resolution resources Environment imagery – Water at the lunar – Energetic – Global geodetic poles? particles grid – Continuous source – Neutrons • Topography of solar energy • Rock – abundances Mineralogy • New Technology – Advanced Radar LRO Follows in the Footsteps of the Apollo Robotic Precursors • Apollo had three (Ranger, Lunar Orbiter and Surveyor) robotic exploration programs with 21 precursor missions from 1961-68 1. Lunar Orbiters provided medium & high resolution imagery (1-2m resolution) which was acquired to support selection of Apollo and Surveyor landing sites. 2. Surveyor Landers made environmental measurements including surface physical characteristics. 3. Ranger hard landers took the first close-up photos of the lunar surface • Exploration needs the above information to go to new sites and resource data to enable sustainable exploration. Lunar Orbiter ETU in Smithsonian Air & Space Museum, Washington DC NRC Decadal (2002) lists priorities for the MOON (all mission classes thru 2013) : NRC Priority Investigation NRC approach LRO measurements Geodetic Topography Altimetry from Global geodetic (crustal evolution) orbit (with topography at ~100m precision orbits) scales (< 1 m rms) Local Geologic Studies Imaging, Sub-meter scale In 3D (geol. -

Impact Craters) Into the Subsurface
SUBSURFACE MINERAL HETEROGENEITY IN THE MARTIAN CRUST AS SEEN BY THE THERMAL EMISSION IMAGING SYSTEM (THEMIS): VIEWS FROM NATURAL “WINDOWS” (IMPACT CRATERS) INTO THE SUBSURFACE. L. L. Tornabene1 , J. E. Moersch1, H. Y. McSween Jr.1, J. A. Piatek1 and P. R. Christensen2; 1Department of Earth and Planetary Sciences, University of Tennessee, Knoxville, Tennessee 37996-1410, 2 Department of Geological Sciences, Arizona State University, Tempe, Arizona 85287–6305, USA. Introduction and Background: Impact craters have been effectively used as a “natural drill” into the crust of the moon, the Earth and on Mars, giving us a glimpse of the mineral and lithologic compositions that are otherwise not exposed or present on surfaces. A lunar study by Tomp- kins and Pieters [1] has demonstrated that Lunar Clementine data could be used to show that numerous craters on the Moon excavated distinct compositions within both the cen- tral uplift and craters walls/terraces of several complex cra- ters with respect to the surrounding lunar surface composi- tion. Later, Tornabene et al [2] demonstrated how Haughton impact structure was an excellent terrestrial analog for dem- onstrating the utility of using craters for studying both near- subsurface and the shallow crust of Mars. Using ASTER Thermal infrared (TIR) data, as an analog for THEMIS TIR, three subsurface units were distinguished within the structure as units that were excavated and uplifted by the impact event. These units, if not for the regional tilt and erosion, would otherwise not be presently exposed if not for the Haughton event. Meanwhile, recent studies on Mars by the Opportunity rover [3] revealed our first clear view of out- cropping bedrock of sedimentary layers within the walls of Eagle and Endurance craters.