A Software Framework for GPU-Based Geo-Temporal Visualization Techniques
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Crime Mapping and Analysis by Community Organizations
U.S. Department of Justice Office of Justice Programs National Institute of Justice National Institute of Justice R e s e a r c h i n B r i e f March 2001 Issues and Findings Crime Mapping and Analysis Discussed in this Brief: An as- sessment of how community orga- by Community Organizations nizations in Hartford, Connecticut, used the Neighborhood Problem Solving (NPS) system, a computer- in Hartford, Connecticut based mapping and crime analysis technology. The NPS system en- By Thomas Rich abled users to create a variety of maps and other reports depicting Crime mapping has become increasingly community policing field offices. Devel- crime conditions by accessing a popular among law enforcement agencies oped with NIJ funding, the system enables database containing the most re- and has enjoyed high visibility at the Fed- users to create a variety of maps and other cent 2 years of incident-level police information. eral level, in the media, and among the reports depicting crime conditions by us- largest police departments in the Nation, ing a database containing the most recent Key issues: The objective in Hart- most notably those in Chicago and New 2 years of incident-level police informa- ford was to extend basic mapping York City. However, there have been few tion, including citizen-initiated calls for and crime analysis technologies efforts to make crime mapping capabilities service, reported crimes, and arrests. Al- beyond the law enforcement com- available to community residents and or- though some police departments routinely munity by putting them into the ganizations, although a National Institute publish aggregate crime statistics and a hands of neighborhood-based organizations so they could analyze of Justice (NIJ)-funded project in Chicago few publish incident-level crime informa- incident-level data and produce in the late 1980s aimed at introducing tion on the Internet, the objective in Hart- their own maps and reports. -

BOSTON POLICE DEPARTMENT | BOSTON REGIONAL INTELLIGENCE CENTER Alexa Lambros, Class of 2018
BOSTON POLICE DEPARTMENT | BOSTON REGIONAL INTELLIGENCE CENTER Alexa Lambros, Class of 2018 The BRIC interns with the BPD Chief of Police! MY ROLE: ASSISTANT CRIME ANALYST/RESEARCH ASSISTANT SPECIAL PROJECT • Mission/Goal Community policing; “working in partnership with the community to fight crime, STANDARD RESPONSIBILITIES reduce fear and improve the quality of life in our • Took raw data from UASI neighborhoods” (BPDnews.com) DAILY INFORMATION INFORMATION crime mapping database of all property stolen from • Size 20th largest LEA in the country; 3rd largest in SUMMARY REQUESTS • Fulfilled information retrieval 9/2015 – 2/2016 New England (Wikipedia) • Assembled packets of recent gang • Utilized Excel skills to • Organization 8 Bureaus and 12 districts incidents and summarized reports requests for Boston/UASI police, correctional, and probation officers organize/categorize data • Focus/Success Utilizes unique combination of • Researched arrests from Urban • Evaulated relationships community relations and statistical analysis to Area Security Initiative (UASI) between numerous elements of reduce crime throughout city; over the last four districts and summarized reports BULLETINS collected data and drew decades, Boston has achieved a large decrease in • Compiled incident summaries on • Created ID Wanted, Wanted, relevant conclusions its overall crime rate (BPDnews.com) violent and property crime within Missing Person, and BOLO bulletins • IMPORTANCE: Created Boston and UASI districts into BRIC's at request of Boston/UASI officers infographic -

Motor Vehicle Theft: Crime and Spatial Analysis in a Non-Urban Region
The author(s) shown below used Federal funds provided by the U.S. Department of Justice and prepared the following final report: Document Title: Motor Vehicle Theft: Crime and Spatial Analysis in a Non-Urban Region Author(s): Deborah Lamm Weisel ; William R. Smith ; G. David Garson ; Alexi Pavlichev ; Julie Wartell Document No.: 215179 Date Received: August 2006 Award Number: 2003-IJ-CX-0162 This report has not been published by the U.S. Department of Justice. To provide better customer service, NCJRS has made this Federally- funded grant final report available electronically in addition to traditional paper copies. Opinions or points of view expressed are those of the author(s) and do not necessarily reflect the official position or policies of the U.S. Department of Justice. This document is a research report submitted to the U.S. Department of Justice. This report has not been published by the Department. Opinions or points of view expressed are those of the author(s) and do not necessarily reflect the official position or policies of the U.S. Department of Justice. EXECUTIVE SUMMARY Crime and Spatial Analysis of Vehicle Theft in a Non-Urban Region Motor vehicle theft in non-urban areas does not reveal the well-recognized hot spots often associated with crime in urban areas. These findings resulted from a study of 2003 vehicle thefts in a four-county region of western North Carolina comprised primarily of small towns and unincorporated areas. While the study suggested that point maps have limited value for areas with low volume and geographically-dispersed crime, the steps necessary to create regional maps – including collecting and validating crime locations with Global Positioning System (GPS) coordinates – created a reliable dataset that permitted more in-depth analysis. -

Crime Mapping: Spatial and Temporal Challenges
CHAPTER 2 Crime Mapping: Spatial and Temporal Challenges JERRY RATCLIFFE INTRODUCTION Crime opportunities are neither uniformly nor randomly organized in space and time. As a result, crime mappers can unlock these spatial patterns and strive for a better theoretical understanding of the role of geography and opportunity, as well as enabling practical crime prevention solutions that are tailored to specific places. The evolution of crime mapping has heralded a new era in spatial criminology, and a re-emergence of the importance of place as one of the cornerstones essential to an understanding of crime and criminality. While early criminological inquiry in France and Britain had a spatial component, much of mainstream criminology for the last century has labored to explain criminality from a dispositional per- spective, trying to explain why a particular offender or group has a propensity to commit crime. This traditional perspective resulted in criminologists focusing on individuals or on communities where the community extended from the neighborhood to larger aggregations (Weisburd et al. 2004). Even when the results lacked ambiguity, the findings often lacked policy relevance. However, crime mapping has revived interest and reshaped many criminol- ogists appreciation for the importance of local geography as a determinant of crime that may be as important as criminal motivation. Between the individual and large urban areas (such as cities and regions) lies a spatial scale where crime varies considerably and does so at a frame of reference that is often amenable to localized crime prevention techniques. For example, without the opportunity afforded by enabling environmental weaknesses, such as poorly lit streets, lack of protective surveillance, or obvious victims (such as overtly wealthy tourists or unsecured vehicles), many offenders would not be as encouraged to commit crime. -
Minard's Chart of Napolean's Campaign
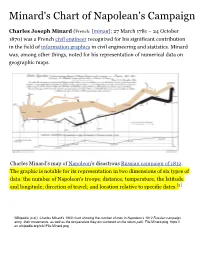
Minard's Chart of Napolean's Campaign Charles Joseph Minard (French: [minaʁ]; 27 March 1781 – 24 October 1870) was a French civil engineer recognized for his significant contribution in the field of information graphics in civil engineering and statistics. Minard was, among other things, noted for his representation of numerical data on geographic maps. Charles Minard's map of Napoleon's disastrous Russian campaign of 1812. The graphic is notable for its representation in two dimensions of six types of data: the number of Napoleon's troops; distance; temperature; the latitude and longitude; direction of travel; and location relative to specific dates.[2] Wikipedia (n.d.). Charles Minard's 1869 chart showing the number of men in Napoleon’s 1812 Russian campaign army, their movements, as well as the temperature they encountered on the return path. File:Minard.png. https:// en.wikipedia.org/wiki/File:Minard.png The original description in French accompanying the map translated to English:[3] Drawn by Mr. Minard, Inspector General of Bridges and Roads in retirement. Paris, 20 November 1869. The numbers of men present are represented by the widths of the colored zones in a rate of one millimeter for ten thousand men; these are also written beside the zones. Red designates men moving into Russia, black those on retreat. — The informations used for drawing the map were taken from the works of Messrs. Thiers, de Ségur, de Fezensac, de Chambray and the unpublished diary of Jacob, pharmacist of the Army since 28 October. Recognition Modern information -

Crime Mapping and Spatial Analysis Using Arcgis Online for Police Officers
Public Safety - Crime Mapping and Spatial Analysis Using ArcGIS Online for Police Officers Knowledge, Skills, and Abilities (KSAs) Supported This training module aids in the development of several KSAs that are fundamental to using GIS for public safety planning and operations. The ability to perform crime mapping using ArcGIS Online is a foundational skill that is relevant to a multitude of GIS applications. In addition, the following training tutorial builds essential knowledge of how to design and use crime data for web mapping. ** This training tutorial is intended for training, exercise, and preparedness efforts only. It is not intended to support emergency response operations.** Knowledge Gained: ✓ Definition of Crime Mapping: Crime mapping is a sub-discipline of geography that works to answer the question, “What crime is happening where?” It focuses on mapping incidents, identifying where the most crime occurs and analyzing the spatial relationships of targets and these areas. ✓ Definition of Heat Mapping: This technique is used to visualize geographic data and show areas where a higher density or cluster of activity occurs. For both types of spatial analysis, a color gradient is used to indicate areas of increasingly higher density. See the following example from Jersey City, NJ: ✓ Esri has selected HERE Map Content (www.esri.com/here) as the foundation street data for its cloud-based mapping platform as well as for StreetMap Premium and numerous other Esri products. ✓ Esri uses HERE map content and HERE point addressing to build the geocoding locators used in both ArcGIS Online (AGOL) and StreetMap Premium (SMP). 1 Skills and Abilities Developed: ✓ Ability to develop a table with the essential spatial data for crime mapping and how to adjust the address format to be recognized in ArcGIS Online platform. -

Time and Animation
TIME AND ANIMATION Petra Isenberg (&Pierre Dragicevic) TIME VISUALIZATION ANIMATION 2 TIME VISUALIZATION ANIMATION Time 3 VISUALIZATION OF TIME 4 TIME Is just another data dimension Why bother? 5 TIME Is just another data dimension Why bother? What data type is it? • Nominal? • Ordinal? • Quantitative? 6 TIME Ordinal Quantitative • Discrete • Continuous Aigner et al, 2011 7 TIME Joe Parry, 2007. Adapted from Mackinlay, 1986 8 TIME Periodicity • Natural: days, seasons • Social: working hours, holidays • Biological: circadian, etc. Has many subdivisions (units) • Years, months, days, weeks, H, M, S Has a specific meaning • Not captured by data type • Associations, conventions • Pervasive in the real-world • Time visualizations often considered as a separate type 9 TIME Shneiderman: • 1-dimensional data • 2-dimensional data • 3-dimensional data • temporal data • multi-dimensional data • tree data • network data 10 VISUALIZING TIME as a time point 11 VISUALIZING TIME as a time period 12 VISUALIZING TIME as a duration 13 VISUALIZING TIME PLUS DATA 14 MAPPING TIME TO SPACE 15 MAPPING TIME TO AN AXIS Time Data 16 TIME-SERIES DATA From a Statistics Book: • A set of observations xt, each one being recorded at a specific time t From Wikipedia: • A sequence of data points, measured typically at successive time instants spaced at uniform time intervals 17 LINE CHARTS Aigner et al, 2011 18 LINE CHARTS Marey’s Physiological Recordings Plethysmograph Étienne-Jules Marey, 1876 (image source) Pneumogram Étienne-Jules Marey, 1876 (image source) 19 LINE CHARTS Pendulum Seismometer (image source) Andrea Bina, 1751 Possibly also 17th century (source) 20 LINE CHARTS Inclinations of planetary orbits Macrobius, 10th or 11th century cited in Kendall, 1990 21 Marey’s Train Schedule LINE CHARTS 6 PARIS LYON 7 22 Étienne-Jules Marey, 1885, cited in Tufte, 1983 OTHER CHARTS Line Plots Point Plots Silhouette Graphs Bar Charts Aigner et al, 2011 23 OTHER CHARTS Combination - New York Times Weather Chart New York Times, 1980. -

A Mobile Visual Analytics Approach for Law Enforcement Situation Awareness
A Mobile Visual Analytics Approach for Law Enforcement Situation Awareness Ahmad M. M. Razip, Abish Malik, Matthew Potrawski, Ross Maciejewski, Member, IEEE, Yun Jang, Member, IEEE, Niklas Elmqvist, Senior Member, IEEE, and David S. Ebert, Fellow, IEEE (a) Risk profile tools give time- and location-aware assessment of public safety using law (b) The mobile system can be used anywhere with cellular network coverage to visualize enforcement data. and analyze law enforcement data. Here, the system is being used as the user walks down a street. Fig. 1: Mobile crime analytics system gives ubiquitous and context-aware analysis of law enforcement data to users. Abstract— The advent of modern smartphones and handheld devices has given analysts, decision-makers, and even the general public the ability to rapidly ingest data and translate it into actionable information on-the-go. In this paper, we explore the design and use of a mobile visual analytics toolkit for public safety data that equips law enforcement agencies and citizens with effective situation awareness and risk assessment tools. Our system provides users with a suite of interactive tools that allow them to perform analysis and detect trends, patterns and anomalies among criminal, traffic and civil (CTC) incidents. The system also provides interactive risk assessment tools that allow users to identify regions of potential high risk and determine the risk at any user-specfied location and time. Our system has been designed for the iPhone/iPad environment and is currently being used and evaluated by a consortium of law enforcement agencies. We report their use of the system and some initial feedback. -

Testing a Geospatial Predictive Policing Strategy
TESTING A GEOSPATIAL PREDICTIVE POLICING STRATEGY: APPLICATION OF ARCGIS 3D ANALYST TOOLS FOR FORECASTING COMMISSION OF RESIDENTIAL BURGLARIES By SOLMAZ AMIRI A dissertation submitted in partial fulfillment of the requirements for the degree of DOCTOR OF DESIGN WASHINGTON STATE UNIVERSITY School of Design and Construction DECEMBER 2014 © Copyright by SOLMAZ AMIRI, 2014 All Rights Reserved © Copyright by SOLMAZ AMIRI, 2014 All Rights Reserved To the Faculty of Washington State University: The members of the Committee appointed to examine the dissertation/thesis of SOLMAZ AMIRI find it satisfactory and recommend that it be accepted. ___________________________________ Kerry R Brooks, Ph.D., Chair ___________________________________ Bryan Vila, Ph.D. ___________________________________ Kenn Daratha, Ph.D. ___________________________________ David Wang, Ph.D. ii ACKNOWLEDGMENTS I would like to thank my committee for their guidance, understanding, patience and support during my studies at Washington State University. I would like to gratefully and sincerely thank Dr. Kerry Brooks for accepting to direct this dissertation. Dr. Brooks introduced me to the fields of geographic information systems and scientific studies of cities, and helped me with every aspect of my research. He asked me questions to help me think harder, spent endless time reviewing and proofreading my papers and supported me during the difficult times in my research. Without his encouragements, continuous guidance and insight, I could not have finished this dissertation. I am grateful to Dr. Bryan Vila for joining my committee. Dr. Vila put a great deal of time to help me understand ecology of crime and environmental criminology. I showed up at his office without having scheduled a prior appointment, and he was always willing to help. -
Defining Visual Rhetorics §
DEFINING VISUAL RHETORICS § DEFINING VISUAL RHETORICS § Edited by Charles A. Hill Marguerite Helmers University of Wisconsin Oshkosh LAWRENCE ERLBAUM ASSOCIATES, PUBLISHERS 2004 Mahwah, New Jersey London This edition published in the Taylor & Francis e-Library, 2008. “To purchase your own copy of this or any of Taylor & Francis or Routledge’s collection of thousands of eBooks please go to www.eBookstore.tandf.co.uk.” Copyright © 2004 by Lawrence Erlbaum Associates, Inc. All rights reserved. No part of this book may be reproduced in any form, by photostat, microform, retrieval system, or any other means, without prior written permission of the publisher. Lawrence Erlbaum Associates, Inc., Publishers 10 Industrial Avenue Mahwah, New Jersey 07430 Cover photograph by Richard LeFande; design by Anna Hill Library of Congress Cataloging-in-Publication Data Definingvisual rhetorics / edited by Charles A. Hill, Marguerite Helmers. p. cm. Includes bibliographical references and index. ISBN 0-8058-4402-3 (cloth : alk. paper) ISBN 0-8058-4403-1 (pbk. : alk. paper) 1. Visual communication. 2. Rhetoric. I. Hill, Charles A. II. Helmers, Marguerite H., 1961– . P93.5.D44 2003 302.23—dc21 2003049448 CIP ISBN 1-4106-0997-9 Master e-book ISBN To Anna, who inspires me every day. —C. A. H. To Emily and Caitlin, whose artistic perspective inspires and instructs. —M. H. H. Contents Preface ix Introduction 1 Marguerite Helmers and Charles A. Hill 1 The Psychology of Rhetorical Images 25 Charles A. Hill 2 The Rhetoric of Visual Arguments 41 J. Anthony Blair 3 Framing the Fine Arts Through Rhetoric 63 Marguerite Helmers 4 Visual Rhetoric in Pens of Steel and Inks of Silk: 87 Challenging the Great Visual/Verbal Divide Maureen Daly Goggin 5 Defining Film Rhetoric: The Case of Hitchcock’s Vertigo 111 David Blakesley 6 Political Candidates’ Convention Films:Finding the Perfect 135 Image—An Overview of Political Image Making J. -
Spatial Technology As a Tool to Analyse and Combat Crime
SPATIAL TECHNOLOGY AS A TOOL TO ANALYSE AND COMBAT CRIME By CORNÉ ELOFF Submitted in accordance with the requirements for the degree DOCTOR OF LITERATURE AND PHILOSOPHY in the subject CRIMINOLOGY at the UNIVERSITY OF SOUTH AFRICA PROMOTER: PROF. J H PRINSLOO NOVEMBER 2006 Student No: 3034-380-1 I declare that SPATIAL TECHNOLOGY AS A TOOL TO ANALYSE AND COMBAT CRIME is my own work and that all the sources that I have used or quoted have been indicated and acknowledged by means of complete references. ____________________________________ ______________ Corné Eloff Date i KEYWORDS Border control and monitoring Car-hijacking Crime analysis Crime combating Crime hot spots Crime incidents Crime Prevention Through Environmental Design (CPTED) Criminological theories Criminology Earth Observation Satellites Ecological theory Electromagnetic energy Geographical Information Systems High density residential House Burglaries Hyperspectral Informal Settlements Land use classification Light detection and ranging (LiDAR) Low density residential Macro analysis Mapping Micro analysis Murder Object Orientated Image Analysis Orbital science Rape Remote Sensing Remote sensing applications Spatial technology ii ACKNOWLEDGMENTS • To my mother and father who have been pillars of support throughout my tertiary education since 1994. • To my wife (Sietske) and son (Damian) for their love and undivided support during my research. • To all my colleagues at the CSIR Satellite Applications Centre for their support and sharing their knowledge of remote sensing and space science which contributed immensely to the gathering of information to complete this research. I would like to make special mention of Ms Elsa de Beer and Ms Betsie Snyman for their administrative support during this study. -

Annual Report, Year 4
ANNUAL REPORT Year 4 1 May 2002 – 30 April 2003 University of California, Santa Barbara May 2003 CSISS is funded by the National Science Foundation (NSF BCS 9978058) to support the development of research infrastructure in the social and behavioral sciences ANNUAL REPORT Year 4 1 May 2002 – 30 April 2003 Compiled by Donald G. Janelle Center for Spatially Integrated Social Science University of California, Santa Barbara 3510 Phelps Hall Santa Barbara CA 93106-4060 Office: (805) 893-8224 Fax: (805) 893-8617 URL: CSISS.org Email: [email protected] May 2003 CSISS IS FUNDED BY THE NATIONAL SCIENCE FOUNDATION (NSF BCS 9978058) TO SUPPORT THE DEVELOPMENT OF RESEARCH INFRASTRUCTURE IN THE SOCIAL AND BEHAVIORAL SCIENCES CENTER FOR SPATIALLY INTEGRATED SOCIAL SCIENCE Executive Committee Science Advisory Board University of California, Santa Barbara Brian Berry, Chair Director and PI University of Texas at Dallas Michael F. Goodchild Richard A. Berk University of California Los Angeles Program Director Bennett I. Bertenthal Donald G. Janelle University of Chicago Jack Dangermond Environmental Systems Senior Researchers Research Institute Richard P. Appelbaum, co-PI Amy K. Glasmeier Helen Couclelis Pennsylvania State University Barbara Herr-Harthorn Myron P. Gutmann Peter J. Kuhn Interuniversity Consortium for Political Terence R. Smith & Social Research Stuart Sweeney Nancy G. LaVigne Urban Institute Luc Anselin Justice Policy Center PI for Tools Development John R. Logan University of Illinois University at Albany, SUNY Urbana-Champaign Emilio F. Moran Indiana University Peter A. Morrison Rand Corporation Karen R. Polenske Massachusetts Institute of Technology Robert Sampson University of Chicago V. Kerry Smith North Carolina State University, Raleigh B.L.