Algorithmic Game Theory
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Potential Games. Congestion Games. Price of Anarchy and Price of Stability
8803 Connections between Learning, Game Theory, and Optimization Maria-Florina Balcan Lecture 13: October 5, 2010 Reading: Algorithmic Game Theory book, Chapters 17, 18 and 19. Price of Anarchy and Price of Staility We assume a (finite) game with n players, where player i's set of possible strategies is Si. We let s = (s1; : : : ; sn) denote the (joint) vector of strategies selected by players in the space S = S1 × · · · × Sn of joint actions. The game assigns utilities ui : S ! R or costs ui : S ! R to any player i at any joint action s 2 S: any player maximizes his utility ui(s) or minimizes his cost ci(s). As we recall from the introductory lectures, any finite game has a mixed Nash equilibrium (NE), but a finite game may or may not have pure Nash equilibria. Today we focus on games with pure NE. Some NE are \better" than others, which we formalize via a social objective function f : S ! R. Two classic social objectives are: P sum social welfare f(s) = i ui(s) measures social welfare { we make sure that the av- erage satisfaction of the population is high maxmin social utility f(s) = mini ui(s) measures the satisfaction of the most unsatisfied player A social objective function quantifies the efficiency of each strategy profile. We can now measure how efficient a Nash equilibrium is in a specific game. Since a game may have many NE we have at least two natural measures, corresponding to the best and the worst NE. We first define the best possible solution in a game Definition 1. -

Electronic Commerce (Algorithmic Game Theory) (Tentative Syllabus)
EECS 547: Electronic Commerce (Algorithmic Game Theory) (Tentative Syllabus) Lecture: Tuesday and Thursday 10:30am-Noon in 1690 BBB Section: Friday 3pm-4pm in EECS 3427 Email: [email protected] Instructor: Grant Schoenebeck Office Hours: Wednesday 3pm and by appointment; 3636 BBBB Graduate Student Instructor: Biaoshuai Tao Office Hours: 4-5pm Friday in Learning Center (between BBB and Dow in basement) Introduction: As the internet draws together strategic actors, it becomes increasingly important to understand how strategic agents interact with computational artifacts. Algorithmic game theory studies both how to models strategic agents (game theory) and how to design systems that take agent strategies into account (mechanism design). On-line auction sites (including search word auctions), cyber currencies, and crowd-sourcing are all obvious applications. However, even more exist such as designing non- monetary award systems (reputation systems, badges, leader-boards, Facebook “likes”), recommendation systems, and data-analysis when strategic agents are involved. In this particular course, we will especially focus on information elicitation mechanisms (crowd- sourcing). Description: Modeling and analysis for strategic decision environments, combining computational and economic perspectives. Essential elements of game theory, including solution concepts and equilibrium computation. Design of mechanisms for resource allocation and social choice, for example as motivated by problems in electronic commerce and social computing. Format: The two weeks will be background lectures. The next half of the class will be seminar style and will focus on crowd-sourcing, and especially information elicitation mechanisms. Each class period, the class will read a paper (or set of papers), and a pair of students will briefly present the papers and lead a class discussion. -

Sok: Tools for Game Theoretic Models of Security for Cryptocurrencies
SoK: Tools for Game Theoretic Models of Security for Cryptocurrencies Sarah Azouvi Alexander Hicks Protocol Labs University College London University College London Abstract form of mining rewards, suggesting that they could be prop- erly aligned and avoid traditional failures. Unfortunately, Cryptocurrencies have garnered much attention in recent many attacks related to incentives have nonetheless been years, both from the academic community and industry. One found for many cryptocurrencies [45, 46, 103], due to the interesting aspect of cryptocurrencies is their explicit consid- use of lacking models. While many papers aim to consider eration of incentives at the protocol level, which has motivated both standard security and game theoretic guarantees, the vast a large body of work, yet many open problems still exist and majority end up considering them separately despite their current systems rarely deal with incentive related problems relation in practice. well. This issue arises due to the gap between Cryptography Here, we consider the ways in which models in Cryptog- and Distributed Systems security, which deals with traditional raphy and Distributed Systems (DS) can explicitly consider security problems that ignore the explicit consideration of in- game theoretic properties and incorporated into a system, centives, and Game Theory, which deals best with situations looking at requirements based on existing cryptocurrencies. involving incentives. With this work, we offer a systemati- zation of the work that relates to this problem, considering papers that blend Game Theory with Cryptography or Dis- Methodology tributed systems. This gives an overview of the available tools, and we look at their (potential) use in practice, in the context As we are covering a topic that incorporates many different of existing blockchain based systems that have been proposed fields coming up with an extensive list of papers would have or implemented. -

Correlated Equilibrium Is a Distribution D Over Action Profiles a Such That for Every ∗ Player I, and Every Action Ai
NETS 412: Algorithmic Game Theory February 9, 2017 Lecture 8 Lecturer: Aaron Roth Scribe: Aaron Roth Correlated Equilibria Consider the following two player traffic light game that will be familiar to those of you who can drive: STOP GO STOP (0,0) (0,1) GO (1,0) (-100,-100) This game has two pure strategy Nash equilibria: (GO,STOP), and (STOP,GO) { but these are clearly not ideal because there is one player who never gets any utility. There is also a mixed strategy Nash equilibrium: Suppose player 1 plays (p; 1 − p). If the equilibrium is to be fully mixed, player 2 must be indifferent between his two actions { i.e.: 0 = p − 100(1 − p) , 101p = 100 , p = 100=101 So in the mixed strategy Nash equilibrium, both players play STOP with probability p = 100=101, and play GO with probability (1 − p) = 1=101. This is even worse! Now both players get payoff 0 in expectation (rather than just one of them), and risk a horrific negative utility. The four possible action profiles have roughly the following probabilities under this equilibrium: STOP GO STOP 98% <1% GO <1% ≈ 0.01% A far better outcome would be the following, which is fair, has social welfare 1, and doesn't risk death: STOP GO STOP 0% 50% GO 50% 0% But there is a problem: there is no set of mixed strategies that creates this distribution over action profiles. Therefore, fundamentally, this can never result from Nash equilibrium play. The reason however is not that this play is not rational { it is! The issue is that we have defined Nash equilibria as profiles of mixed strategies, that require that players randomize independently, without any communication. -

Algorithmic Game Theory
Algorithmic Game Theory 3 Abstract When computers began their emergence some 50 years ago, they were merely standalone machines that could iterate basic computations a fixed number of times. Humanity began to tailor problems so that computers could compute answers, thus forming a language between the two. Al- gorithms that computers could understand began to be made and left computer scientists with the task of determining which algorithms were better than others with respect to running time and complexity. Inde- pendently, right around this time, game theory was beginning to take o↵ with applications, most notably in economics. Game theory studies inter- actions between individuals, whether they are competing or cooperating. Who knew that in almost 50 years time these two seemingly independent entities would be forced together with the emergence of the Internet? The Internet was not simply made by one person but rather was the result of many people wanting to interact. Naturally, Game Theorists stepped in to understand the growing market of the Internet. Additionally, Computer Scientists wished to create new designs and algorithms with Internet ap- plications. With this clash of disciplines, a hybrid subject was born, Algo- rithmic Game Theory (AGT). This paper will showcase the fundamental task of determining the complexity of finding Nash Equilibria, address algorithms that attempt to model how humans would interact with an uncertain environment and quantify inefficiency in equilibria when com- pared to some societal optimum. 4 Contents 1 Introduction 6 2 Computational Complexity of Nash Equilibria 7 2.1 Parity Argument . 8 2.2 The PPAD Complexity Class . -

Introduction to the AI Magazine Special Issue on Algorithmic Game Theory
Introduction to the AI Magazine Special Issue on Algorithmic Game Theory Edith Elkind Kevin Leyton-Brown Abstract We briefly survey the rise of game theory as a topic of study in artifi- cial intelligence, and explain the term algorithmic game theory. We then describe three broad areas of current inquiry by AI researchers in algo- rithmic game theory: game playing, social choice, and mechanism design. Finally, we give short summaries of each of the six articles appearing in this issue. 1 Algorithmic Game Theory and Artificial Intelligence Game theory is a branch of mathematics devoted to studying interaction among rational and self-interested agents. The field took on its modern form in the 1940s and 1950s (von Neumann and Morgenstern, 1947; Nash, 1950; Kuhn, 1953), with even earlier antecedents (e.g., Zermelo, 1913; von Neumann, 1928). Although it has had occasional and significant overlap with computer science over the years, game theory received most of its early study by economists. Indeed, game theory now serves as perhaps the main analytical framework in microeconomic theory, as evidenced by its prominent role in economics text- books (e.g., Mas-Colell, Whinston, and Green, 1995) and by the many Nobel prizes in Economic Sciences awarded to prominent game theorists. Artificial intelligence got its start shortly after game theory (McCarthy et al., 1955), and indeed pioneers such as von Neumann and Simon made early contributions to both fields (see, e.g., Findler, 1988; Simon, 1981). Both game theory and AI draw (non-exclusively) on decision theory (von Neumann and Morgenstern, 1947); e.g., one prominent view defines artificial intelligence as \the study and construction of rational agents" (Russell and Norvig, 2003), and hence takes a decision-theoretic approach when the world is stochastic. -
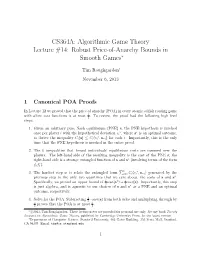
Algorithmic Game Theory Lecture #14: Robust Price-Of-Anarchy Bounds in Smooth Games∗
CS364A: Algorithmic Game Theory Lecture #14: Robust Price-of-Anarchy Bounds in Smooth Games∗ Tim Roughgardeny November 6, 2013 1 Canonical POA Proofs In Lecture 12 we proved that the price of anarchy (POA) in every atomic selfish routing game 5 with affine cost functions is at most 2 . To review, the proof had the following high-level steps. 1. Given an arbitrary pure Nash equilibrium (PNE) s, the PNE hypothesis is invoked ∗ ∗ once per player i with the hypothetical deviation si , where s is an optimal outcome, ∗ to derive the inequality Ci(s) ≤ Ci(si ; s−i) for each i. Importantly, this is the only time that the PNE hypothesis is invoked in the entire proof. 2. The k inequalities that bound individuals' equilibrium costs are summed over the players. The left-hand side of the resulting inequality is the cost of the PNE s; the right-hand side is a strange entangled function of s and s∗ (involving terms of the form ∗ fefe ). Pk ∗ 3. The hardest step is to relate the entangled term i=1 Ci(si ; s−i) generated by the previous step to the only two quantities that we care about, the costs of s and s∗. 5 ∗ 1 Specifically, we proved an upper bound of 3 cost(s ) + 3 cost(s). Importantly, this step is just algebra, and is agnostic to our choices of s and s∗ as a PNE and an optimal outcome, respectively. 1 4. Solve for the POA. Subtracting 3 · cost(s) from both sides and multiplying through by 3 5 2 proves that the POA is at most 2 . -

Cryptocurrency Mining Games with Economic Discount and Decreasing
Cryptocurrency Mining Games with Economic Discount and Decreasing Rewards Marcelo Arenas PUC Chile & IMFD Chile, Santigo, Chile [email protected] Juan Reutter PUC Chile & IMFD Chile, Santigo, Chile [email protected] Etienne Toussaint University of Edinburgh, Edinburgh, UK [email protected] Martín Ugarte PUC Chile & IMFD Chile, Santigo, Chile [email protected] Francisco Vial ProtonMail & IMFD Chile, Santiago, Chile [email protected] Domagoj Vrgoč PUC Chile & IMFD Chile, Santigo, Chile [email protected] Abstract In the consensus protocols used in most cryptocurrencies, participants called miners must find valid blocks of transactions and append them to a shared tree-like data structure. Ideally, the rules of the protocol should ensure that miners maximize their gains if they follow a default strategy, which consists on appending blocks only to the longest branch of the tree, called the blockchain. Our goal is to understand under which circumstances are miners encouraged to follow the default strategy. Unfortunately, most of the existing models work with simplified payoff functions, without considering the possibility that rewards decrease over time because of the game rules (like in Bitcoin), nor integrating the fact that a miner naturally prefers to be paid earlier than later (the economic concept of discount). In order to integrate these factors, we consider a more general model where issues such as economic discount and decreasing rewards can be set as parameters of an infinite stochastic game. In this model, we study the limit situation in which a miner does not receive a full reward for a block if it stops being in the blockchain. -

Professor Shang-Hua Teng
Professor Shang-Hua Teng Department of Computer Science, University of Southern California 1039 25 Street 3710 McClintock, RTH 505, Los Angeles, CA 90089 Santa Monica, CA 90403 (213) 740-3667, [email protected] (617) 440-4281 EMPLOYMENT: University Professor USC (2017 – ) Seeley G. Mudd Professor (Computer Science and Mathematics) USC (2012 – ) Chair and Seeley G. Mudd Professor (Computer Science) USC (2009 – 2012) Professor (Computer Science) Boston University (2002 – 2009) Research Affiliate Professor (Mathematics) MIT (1999 – Present) Visiting Research Scientist Microsoft Research Asia and New England (2004 – Present) Senior Research Scientist Akamai (1997 – 2009) Visiting Professor (Computer Science) Tsinghua University (2004 – 2008) Professor (Computer Science)[Associate Professor before 1999] UIUC (2000 – 2002) Research Scientist IBM Almaden Research Center (1997 – 1999) Assistant Professor (Computer Science) Univ. of Minnesota (1994 – 1997) Research Scientist Intel Corporation (Summer 1994, 1995) Instructor (Mathematics) MIT (1992 – 1994) Computer Scientist NASA Ames Research Center (Summer 1993) Research Scientist Xerox Palo Alto Research Center (1991 – 1992) EDUCATION: Ph.D. (Computer Science) Carnegie Mellon University (1991) Thesis: “A Unified Geometric Approach to Graph Partitioning.” Advisor: Gary Lee Miller M.S. (Computer Science) University of Southern California (1988) Thesis: “Security, Verifiablity, and Universality in Distributed Computing”. Advised by Leonard Adleman and Ming-Deh Huang B.S. (Computer Science) & B.A. (Electrical -

Prices of Anarchy and Stability
Wardrop Games Price of Anarchy Smoothness Price of Stability Prices of Anarchy and Stability Algorithmic Game Theory Winter 2019/20 . Martin Hoefer Algorithmic Game Theory 2019/20 Prices of Anarchy and Stability Wardrop Games Price of Anarchy Smoothness Price of Stability Wardrop Games Price of Anarchy Smoothness Price of Stability . Martin Hoefer Algorithmic Game Theory 2019/20 Prices of Anarchy and Stability Wardrop Games Price of Anarchy Smoothness Price of Stability Wardrop Traffic Model A Wardrop game is given by I Directed graph G = (V; E) I k kinds of traffic (termed “commodities”) with source-sink pair (si; ti) and rate ri > 0, für i 2 [k] = f1; : : : ; kg I Commodity i composed of infinitely many, infinitesimally small players with total mass ri. I Latency functions de : [0; 1] ! R, for every e 2 E. Wardrop games are a model for traffic routing (or, more generally, resource allocation) scenarios with a large number of users, in which the influence of a single user is very small (e.g., in large traffic or computer networks). Martin Hoefer Algorithmic Game Theory 2019/20 Prices of Anarchy and Stability Wardrop Games Price of Anarchy Smoothness Price of Stability Single-Commodity Games Simplifying Assumptions: I Latency functions are non-negative, non-decreasing, and convex. I We consider single-commodity games, with source s and sink t. I Rate normalized to r1 = 1. Flows and Latencies in Wardrop Games: I P is the set of all paths P from s to t. P I A flow gives a flow value f 2 [0; 1], for every P 2 P, with f = 1. -
Mechanism Design
COMP323 { Introduction to Computational Game Theory Topics of Algorithmic Game Theory Paul G. Spirakis Department of Computer Science University of Liverpool Paul G. Spirakis (U. Liverpool) Topics of Algorithmic Game Theory 1 / 90 Outline 1 Introduction 2 Existence of Nash equilibrium 3 Complexity of Nash equilibrium 4 Potential Games 5 Mechanism Design Paul G. Spirakis (U. Liverpool) Topics of Algorithmic Game Theory 2 / 90 Introduction 1 Introduction 2 Existence of Nash equilibrium 3 Complexity of Nash equilibrium 4 Potential Games 5 Mechanism Design Paul G. Spirakis (U. Liverpool) Topics of Algorithmic Game Theory 3 / 90 Introduction Algorithmic game theory Algorithmic game theory... lies in the intersection of Game Theory and Computational Complexity and combines algorithmic thinking with game-theoretic economic concepts. Algorithmic game theory can be seen from two perspectives: Analysis: computation and analysis of properties of Nash equilibria; Design: design games that have both good game-theoretic and algorithmic properties (algorithmic mechanism design). Paul G. Spirakis (U. Liverpool) Topics of Algorithmic Game Theory 4 / 90 Introduction Some topics of algorithmic game theory Since Nash equilibria can be shown to exist, can an equilibrium be found in polynomial time? What is the computational complexity of computing a Nash equilibrium? What is the computational complexity of deciding whether a game has a pure Nash equilibrium, and of computing a pure Nash equilibrium? How much is the inefficiency of equilibria? I.e., how does the efficiency of a system degrades due to selfish behavior of its agents? How should an auction be structured if the seller wishes to maximize her revenue? Paul G. -

A Game Theoretic Analysis of Resource Mining in Blockchain
A Game Theoretic Analysis of Resource Mining in Blockchain Rajani Singh1,5, Ashutosh Dhar Dwivedi1,2, Gautam Srivastava3,4, Agnieszka Wiszniewska-Matyszkiel5, and Xiaochun Cheng6 1Department of Electrical and Computer Engineering, Faculty of Engineering, University of Waterloo, Waterloo, ON, Canada 2Institute of Computer Science, Polish Academy of Sciences, Warsaw, Poland 3Department of Mathematics & Computer Science, Brandon University, Brandon, Canada, R7A6A9 4Research Center for Interneural Computing, China Medical University, Taichung 40402, Taiwan, Republic of China. 5Institute of Applied Mathematics and Mechanics, University of Warsaw, Poland 6Department of Computing Science, Middlesex University, London, UK Abstract Blockchain and cryptocurrency are a hot topic in today's digital world. In this paper, we create a game theoretic model in continuous time. We consider a dynamic game model of the bitcoin market, where miners or players use mining systems to mine bitcoin by investing electricity into the mining system. Although this work is motivated by BTC, the work pre- sented can be applicable to other mining systems similar to BTC. We propose three concepts of dynamic game theoretic solutions to the model: Social optimum, Nash equilibrium and myopic Nash equilibrium. Using the model that a player represents a single \miner" or a \mining pool", we develop novel and interesting results for the cryptocurrency world. Keywords: Blockchain, Bitcoin Mining, Dynamic Game Theory, Differential Game, Hamilton-Jacobi-Bellman Equation, Social Optimum, Nash Equilibrium, myopic Nash equi- librium, Pigovian Tax 1 Introduction A bitcoin is created by miners, using complex mathematical \proof of work" procedures by computing hashes [8]. For each successful attempt, miners get rewards in terms of bitcoin and transaction fees.